Clear Sky Science · es
SVRS: red de reconstrucción voxel 3D auto-supervisada a partir de visión estéreo
Ver el mundo en 3D para robots más seguros
Los coches autónomos y los robots de servicio deben comprender la forma del entorno en tres dimensiones para evitar colisiones y navegar de forma segura. Este estudio presenta una forma más rápida y precisa de convertir pares de imágenes de cámara ordinarias en un mapa 3D detallado en forma de cuadrícula de los objetos cercanos, lo que podría hacer que los robots del futuro sean más fiables sin necesidad de sensores láser costosos.
De imágenes planas a espacio sólido
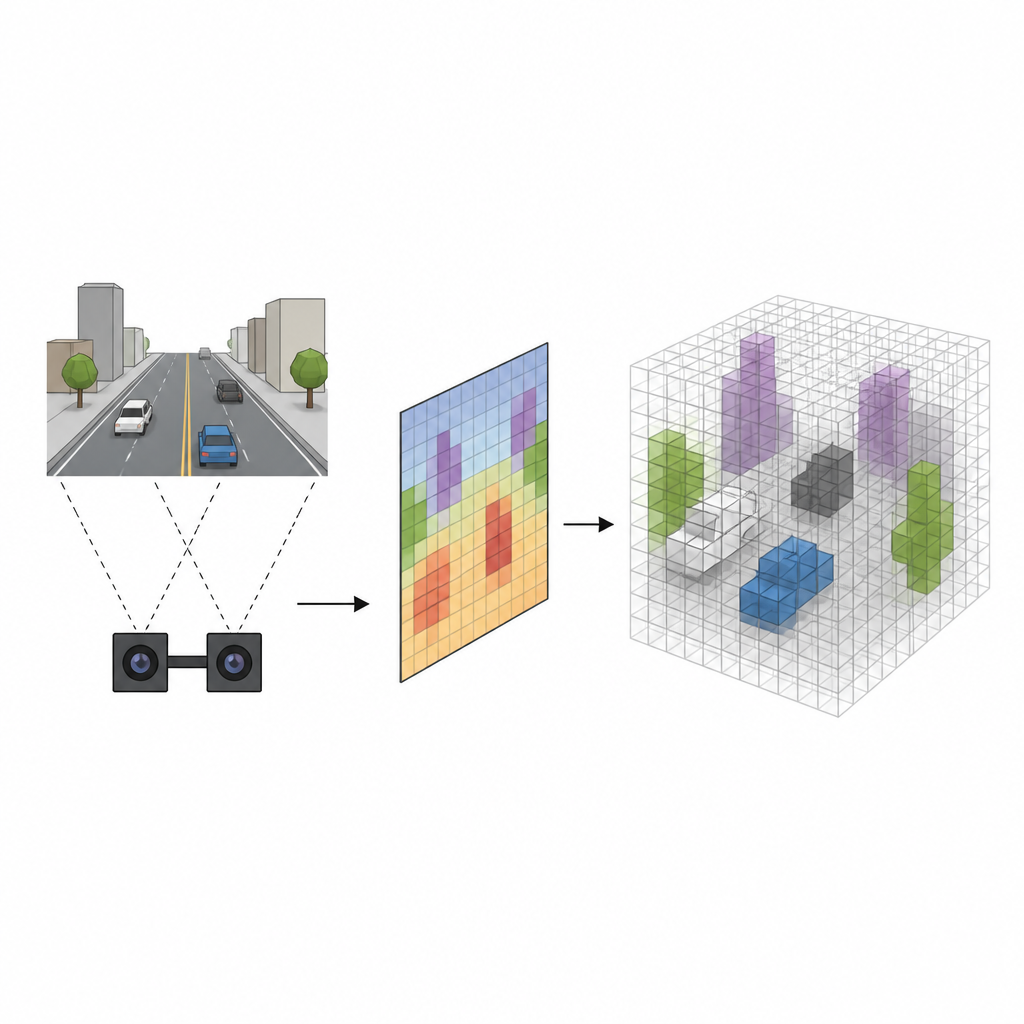
Muchos robots usan cámaras estéreo, que observan una escena desde dos puntos de vista ligeramente distintos, como nuestros ojos. Los sistemas tradicionales primero estiman la distancia de cada píxel a la cámara y luego proyectan cada píxel en el espacio 3D, rellenando una rejilla de pequeños cubos llamados voxels que marcan dónde podrían estar los objetos. Aunque este método funciona, es lento y tiende a difuminar los bordes de los objetos, creando falsas alarmas donde el espacio vacío se marca erróneamente como ocupado. El nuevo enfoque, llamado SVRS, evita esta pesada proyección píxel a píxel y en su lugar aprende una conexión más directa entre lo que ven las cámaras y qué cubos en el espacio están realmente llenos.
Enseñar a la red a pensar en cubos
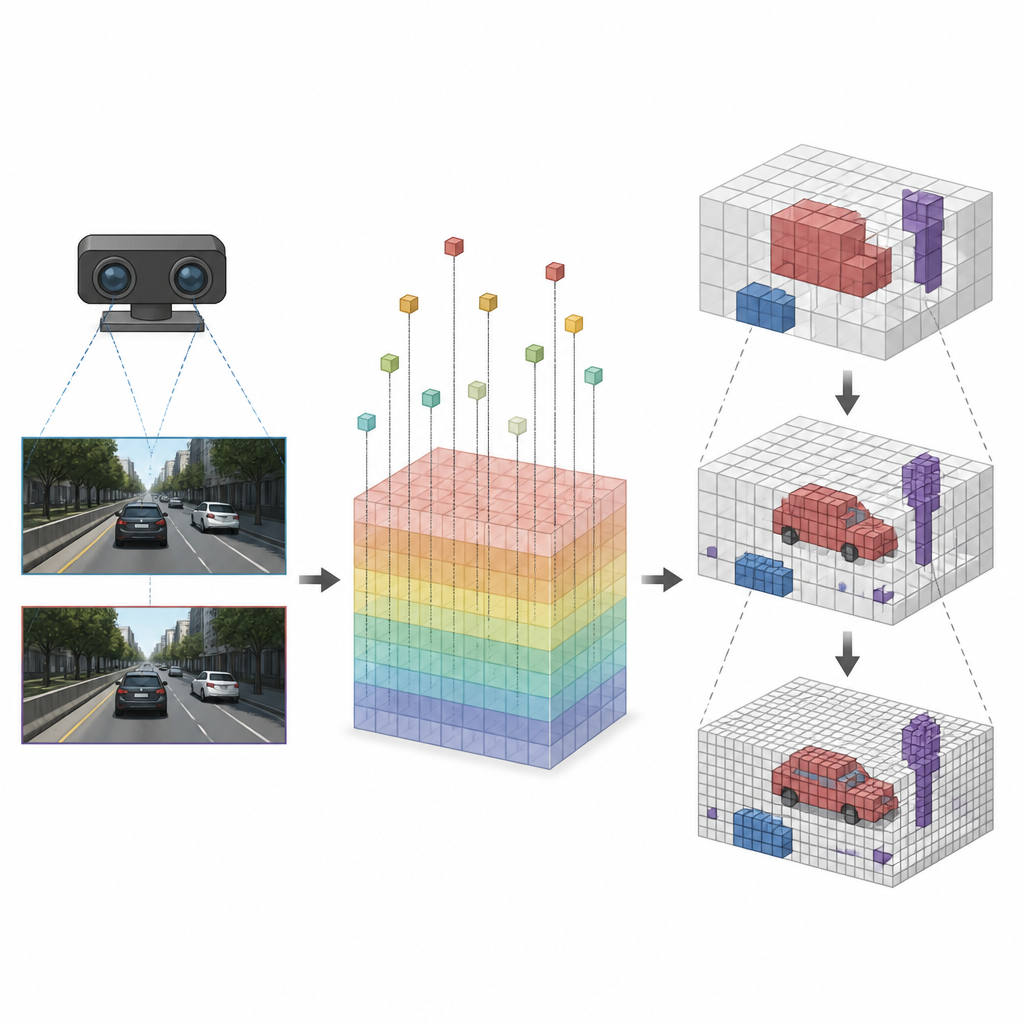
Los investigadores representan el área frente a un vehículo como una pila de cubos uniformes que juntas forman una rejilla 3D. En lugar de partir de los píxeles y empujarlos hacia el exterior en el espacio, su Módulo de Proyección Pixel-Voxel parte de cada cubo y pregunta dónde aparecería en las imágenes de las cámaras. Usando la geometría conocida de las cámaras estéreo, el módulo proyecta cada cubo de vuelta en las dos imágenes y muestrea las ricas características internas que calculan las redes estéreo modernas. Esto convierte la información densa de la imagen en una señal 3D dispersa vinculada directamente a cada cubo, eliminando trabajo inútil en regiones vacías y reduciendo el difuminado de bordes que causa falsos positivos.
Enfocar el detalle donde importa
Una vez que cada cubo se ha vinculado a las características de imagen adecuadas, SVRS aplica una Arquitectura Codificador-Decodificador basada en Octree para decidir qué cubos están ocupados. La idea es empezar con una vista tosca de la escena y luego refinarla paso a paso. En cada nivel, la red predice qué cubos grandes contienen algo y usa esa información para guiar el siguiente nivel, más fino, donde solo se examinan en detalle las regiones prometedoras. Las áreas vacías se suprimen temprano para que no abrumen a la red a medida que hace zoom. Esta estrategia de lo grueso a lo fino mantiene los cálculos centrados en coches, bordes de la calzada y otros objetos importantes en lugar de malgastar esfuerzo en aire libre.
Aprender de sensores existentes sin etiquetas manuales
Para entrenar el sistema, los autores evitan la costosa tarea de etiquetar escenas 3D a mano. En su lugar, usan mapas de profundidad y nubes de puntos producidos por métodos estéreo y basados en láser ya consolidados como señales de enseñanza. Limpian la profundidad estéreo con un detector de bordes simple antes de convertirla en una rejilla 3D, y también experimentan entrenando directamente contra mediciones láser. Esta configuración auto-supervisada permite que la red imite datos 3D de alta calidad mientras sigue siendo mucho más ligera y rápida en tiempo de ejecución, lo que la hace práctica para ordenadores embebidos en vehículos.
Vistas 3D más rápidas y limpias para máquinas en movimiento
Las pruebas en un gran conjunto de datos de conducción muestran que SVRS reconstruye rejillas 3D tan acertadamente como los métodos estéreo líderes mientras funciona hasta catorce veces más rápido que algunas sólidas referencias y alrededor de tres veces más rápido que otros sistemas en tiempo real. Comete menos errores al afirmar que el espacio vacío está ocupado, aunque puede dejar pasar algunos objetos pequeños, reflejando un equilibrio entre cautela y exhaustividad. Para un lector no especializado, el mensaje clave es que el método ayuda a las máquinas a convertir imágenes de cámara en una imagen 3D de la carretera más clara y eficiente, lo que es un paso importante hacia vehículos y robots autónomos más seguros y capaces.
Cita: Zou, Z., Wu, Y., Zhang, H. et al. SVRS: self-supervised 3D voxel reconstruction network from stereo vision. Sci Rep 16, 15548 (2026). https://doi.org/10.1038/s41598-026-45924-0
Palabras clave: visión estéreo, reconstrucción 3D, rejilla de voxels, conducción autónoma, percepción robótica