Clear Sky Science · he
SVRS: רשת שיחזור ווקסלים תלת־ממדית בלמידה ללא פיקוח מראייה סטריאוסקופית
לראות את העולם בתלת־ממד בשביל רובוטים בטוחים יותר
מכוניות אוטונומיות ורובוטים שירותיים חייבים להבין את צורת העולם סביבם בשלוש מימדים כדי להימנע מהתנגשויות ולהנווט בבטחה. המחקר הזה מציג דרך מהירה ומדויקת יותר להמיר זוגות תמונות מצלמה רגילות למפת רשת תלת־ממדית מפורטת של עצמים בקרבה, מה שעשוי להפוך רובוטים עתידיים לאמינים יותר מבלי להזדקק לחיישני לייזר יקרים.
מתמונות שטוחות למרחב מוצק
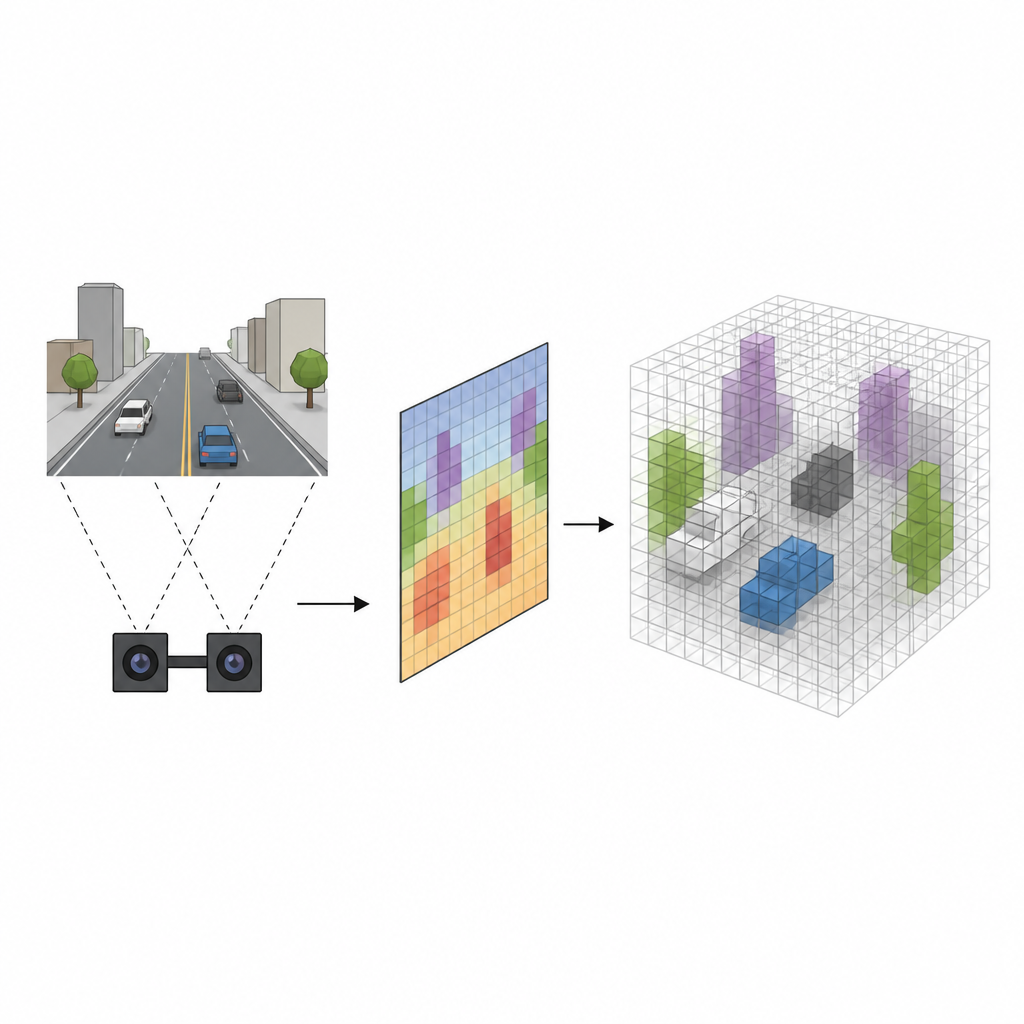
הרבה רובוטים משתמשים במצלמות סטריאו, שמתבוננות בסצנה מנקודות מבט מעט שונות, בדומה לעינינו. מערכות מסורתיות מעריכות קודם את מרחק כל פיקסל מהמצלמה ואז מקרינות כל פיקסל לחלל התלת־ממדי, ממלאות רשת של קוביות זעירות הנקראות ווקסלים שמציינות היכן עשויים להיות עצמים. למרות שהשיטה עובדת, היא איטית ונוטה לטשטש את קצוות העצמים, וליצור אזעקות שווא שבהן מרחב ריק מסומן בטעות כמלא. הגישה החדשה, שנקראת SVRS, מדלגת על ההקרנה הכבדה פיקסל־אחר־פיקסל ובמקום זאת לומדת חיבור ישיר יותר בין מה שהמצלמות רואות לאילו קוביות במרחב מלאות באמת.
מלמדים את הרשת לחשוב בקוביות
החוקרים מייצגים את האזור מול כלי הרכב כמערום קוביות אחידות היוצר רשת תלת־ממדית. במקום להתחיל מהפיקסלים ולדחוף אותם החוצה לחלל, מודול ה־Pixel Voxel Projecting שלהם מתחיל מכל קובייה ושואל היכן היא תתמקד בתמונות המצלמה. באמצעות הגאומטריה המוכרת של מצלמות הסטריאו, המודול מקרין כל קובייה חזרה לשתי התמונות ודוגם את התכונות הפנימיות העשירות שרשתות סטריאו מודרניות מחשבות. זה הופך מידע צפוף מהתמונה לאות תלת־ממדי דל הגרעין הקשור ישירות לכל קובייה, חותך עבודה מיותרת באזורים ריקים ומפחית את הטשטוש בקצוות שגורם לאיתותים שווא.
מרוכזים בפרטים היכן שזה חשוב
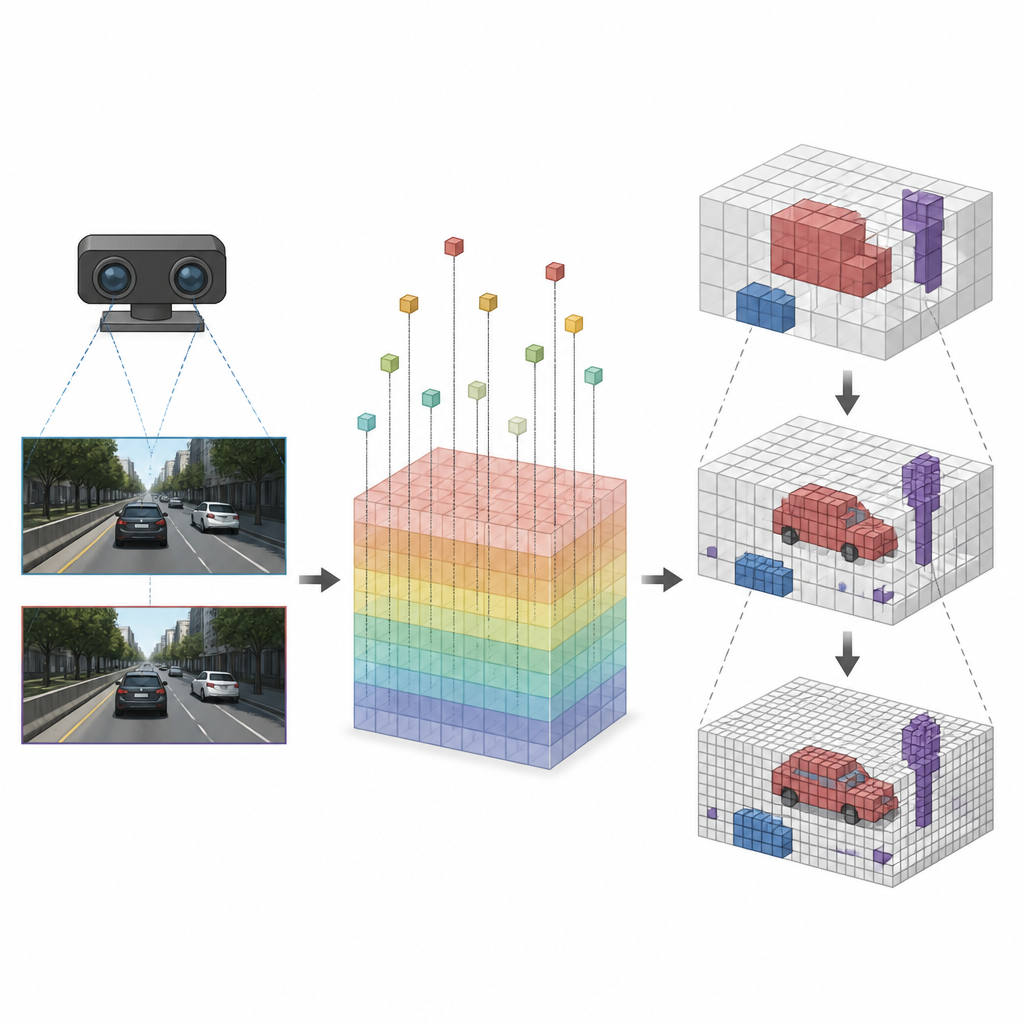
לאחר שלכל קובייה קושרו תכונות התמונה המתאימות, SVRS מיישמת ארכיטקטורת קידוד־פענוח מבוססת אוקטְרִי (Octree) כדי להחליט אילו קוביות מאוישות. הרעיון הוא להתחיל במבט גס על הסצנה ואז לחדד אותו שלב אחרי שלב. בכל רמה, הרשת חוזה אילו קוביות גדולות מכילות משהו ומשתמשת במידע זה להנחות את הרמה הבאה, הדקה יותר, שבה נבחנות בפירוט רק אזורים מבטיחים. אזורים ריקים מדוכאים מוקדם כדי לא להציף את הרשת כשהיא מתמקדת. האסטרטגיה מגס לדק שומרת את החישובים מתמקדים ברכבים, בקצוות הכביש ובאובייקטים חשובים אחרים במקום לבזבז מאמץ על אוויר פתוח.
לומדים מחיישנים קיימים בלי תיוג ידני
להכשרת המערכת, המחברים נמנעים מהמשימה היקרה של תיוג ידני של סצנות תלת־ממד. במקום זאת הם משתמשים במפות עומק ובענני נקודות שמופקים על ידי שיטות סטריאו וחיישני לייזר חזקים קיימים כאותות הדרכה. הם מנקים את עומק הסטריאו באמצעות גלאי קצוות פשוט לפני המרתו לרשת תלת־ממדית, וכן ניסו גם לאמן ישירות מול מדידות לייזר. ההגדרה הלמידתית העצמית הזו מאפשרת לרשת לחקות נתוני תלת־ממד איכותיים בעוד שהיא נשארת הרבה־יותר־קלה ומהירה בזמן ריצה, מה שהופך אותה לפרקטית למחשבים משובצים בכלי רכב.
מראות תלת־ממד מהירות ונקיות יותר למכונות נעות
ניסויים על מאגר נתונים נהיגה גדול מראים ש־SVRS משחזרת רשתות תלת־ממד בדיוק דומה לשיטות מובילות מבוססות סטריאו בעוד שהיא רצה עד פי ארבעה־עשר מהר יותר ממספר קווי בסיס חזקים וכמעט פי שלושה מהר יותר ממערכות אחרות בזמן אמת. היא גורמת לפחות טענות שגויות שמרחב ריק מאויש, אם כי היא עלולה להחמיץ כמה עצמים קטנים — איזון בין זהירות ושלמות. עבור קורא כללי, המסר המרכזי הוא שהשיטה עוזרת למכונות להפוך תמונות מצלמה לתמונה תלת־ממדית ברורה ויעילה יותר של הדרך קדימה, צעד חשוב לעבר כלי רכב ורובוטים אוטונומיים בטוחים ומסוגלים יותר.
ציטוט: Zou, Z., Wu, Y., Zhang, H. et al. SVRS: self-supervised 3D voxel reconstruction network from stereo vision. Sci Rep 16, 15548 (2026). https://doi.org/10.1038/s41598-026-45924-0
מילות מפתח: ראייה סטריאוסקופית, שיחזור תלת־ממדי, רשת ווקסלים, נהיגה אוטונומית, תפיסת רובוט