Clear Sky Science · tr
RGBD-kamera ve LiDAR verilerine dayalı 2B ızgara harita oluşturma
Günlük Mekânlar İçin Daha Akıllı Robot Haritaları
Depo robotlarının paletlerden kaçınmasından ev robotlarının mobilyaların etrafında dolaşmasına kadar, dünyada hareket eden makinelerin güvenli kalabilmesi için iyi haritalara ihtiyacı vardır. Ancak görmelerini sağlayan sensörlerin—lazer tarayıcılar ve derinlik kameralarının—her birinin kör noktaları vardır. Bu çalışma, basit bir lazer tarayıcıyı düşük maliyetli bir derinlik kamerasıyla birleştirmenin ve kameranın hatalarını sahada otomatik olarak düzeltmenin, küçük iç mekan robotlarına çevrelerinin daha net ve güvenli haritalarını nasıl sağlayabileceğini gösteriyor.
Neden Tek Sensör Yetersiz Kalır
Günümüz robotları genellikle ya renk ve mesafe görebilen bir derinlik kamerasına ya da ışık darbeleriyle mesafe ölçen bir lazer tarayıcıya dayanır. Derinlik kameraları ucuz ve kompakt olsa da loş ışıkta, parlak yansımada veya birkaç metre ötesinde zorlanır ve menzil arttıkça mesafe okumaları yavaşça gerçeğinden sapar. Buna karşılık lazer tarayıcılar son derece hassastır ve karanlıkta çalışır, ancak genellikle dünyanın yalnızca ince bir yatay dilimini algılar ve alttaki veya üstündeki nesneleri—alçak paletler, sarkan raflar veya boş yapılar gibi—kaçırabilir. Ayrıca lazer sistemleri genelde daha pahalı ve hesaplaması daha yoğundur. Tek başına hiçbir sensör tipi sıkışık alanlar ve yoğun iç mekan lojistik merkezleri için gereken zengin, güvenilir görüşü sağlamaz.
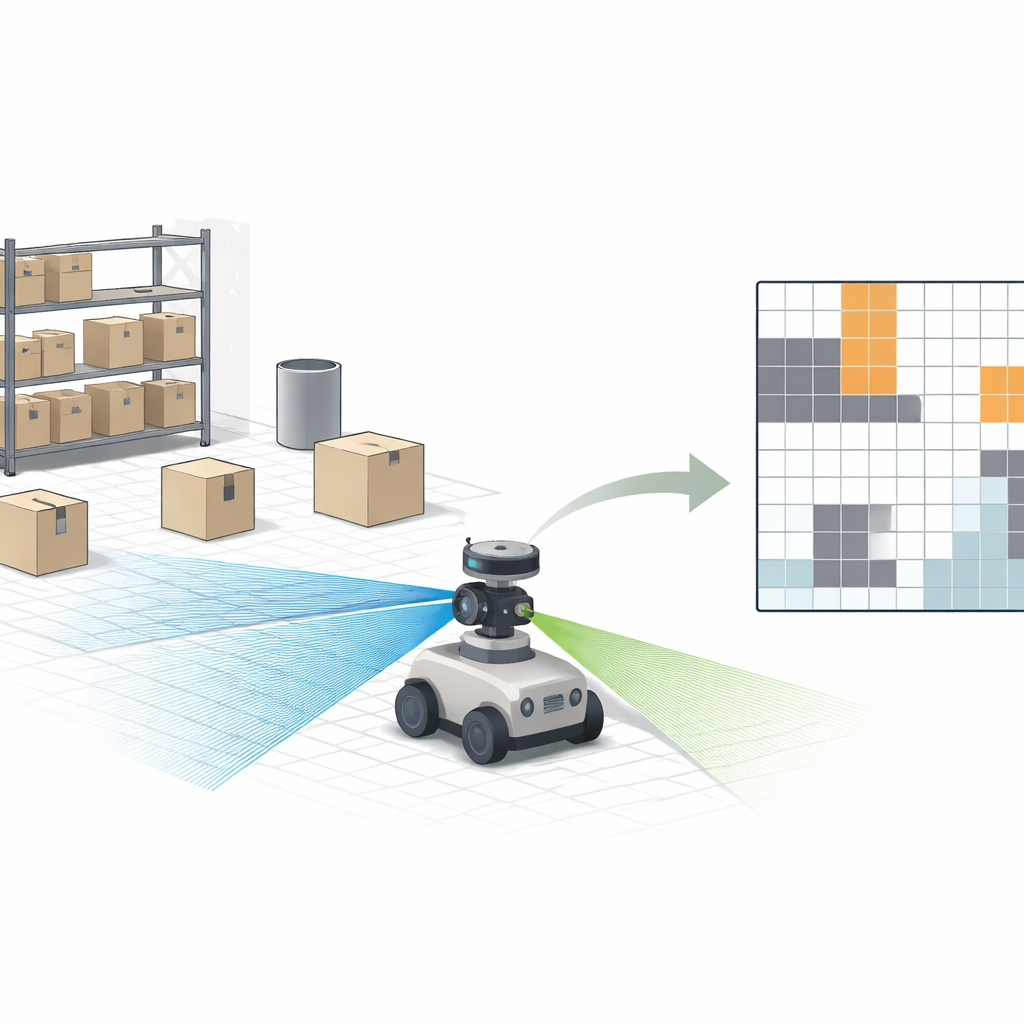
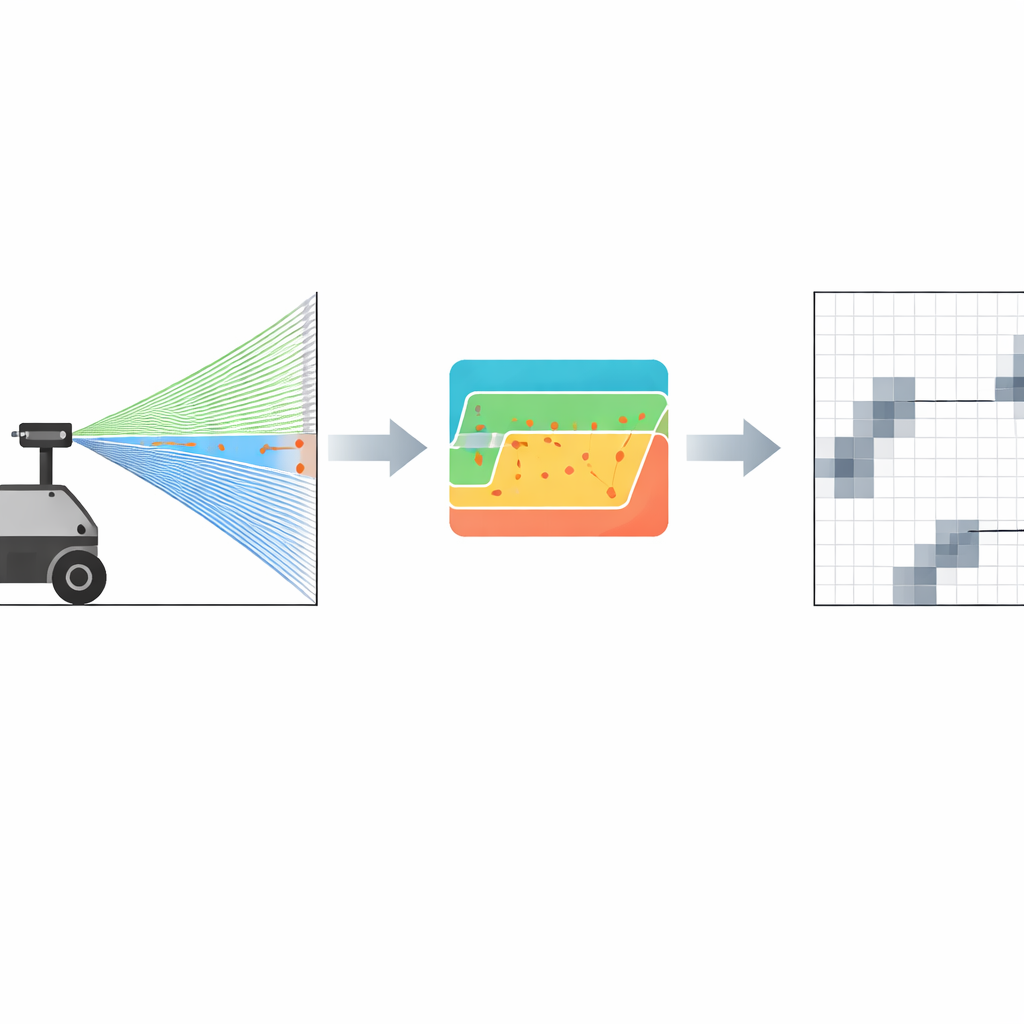
İki Görüşü Tek Bir Açık Resimde Birleştirmek
Yazarlar bu boşluğu her iki sensörün güçlü yönlerini tek bir 2B ızgara haritasında birleştirerek kapatıyor—yerin küçük karelere bölündüğü ve her birinin boş veya dolu olarak işaretlendiği türden bir harita. Robotları düşük maliyetli bir RGBD (renk artı derinlik) kamera ve düzlemsel bir LiDAR tarayıcı taşır. Önce, kamera veya lazer tarafından görülen bir noktanın haritada aynı yere denk gelmesi için tüm ölçümler ortak bir referans çerçevesine hizalanır. Ardından tam bir 3B model tutmaya çalışmak yerine, sadece ilgili 3B noktalar zemin düzlemine projekte edilerek tavan ve zemin karmaşası filtrelenir. Olasılıksal bir şema, her bir ızgara hücresini o mesafede hangi sensörün ne kadar güvenilir olduğuna göre günceller: lazer okumaları çalışma menzilinde yüksek güvenilirlikli kabul edilirken, kameranın etkisi mesafe arttıkça gürültüsü büyüdüğünden yavaşça azalır.
Lazerin Kamerayı Düzeltmesine İzin Vermek
Temel yenilik, robotun sahada kameranın derinlik önyargısını sürekli olarak düzeltmesine izin veren hafif bir kalibrasyon adımıdır. Robot düz bir duvara baktığında, lazerin milimetre hassasiyetindeki uzaklığını “gerçek değer” olarak kullanır. Gürültü varlığında bile lazer verilerinden duvara olan kesin mesafeyi tahmin eden sağlam bir uyum prosedürü vardır. Sistem daha sonra bunu kameranın bildirdiğiyle karşılaştırır ve kameranın ortalama okuması lazerinkiyle eşleşecek şekilde tek bir derinlik ofseti ayarlar. Kritik olarak, bu süreç ayrıntılı dama tahtası desenleri, hareket kontrollü kollar veya tam altı serbestlik dereceli kalibrasyon gerektirmez; uygun düz bir yüzey görüş alanına girdiğinde gerçek bir depoda hızlıca tetiklenebilir. Bu anlık ayar, aksi takdirde robotun engellerin yerini yanlış değerlendirmesine yol açacak sistematik kamera hatalarını doğrudan azaltır.
Daha Temiz Derinlikten Daha Güvenli Yollara
Araştırmacılar yöntemlerini iki düşük maliyetli lazer tarayıcı ve bir Intel RealSense derinlik kamerası ile donatılmış küçük depo tipi bir robot üzerinde değerlendirdi. Lazer referans değerine karşı yapılan kontrol testlerinde, kalibrasyondan sonra kameranın mesafe hatası belirgin şekilde düştü—örneğin yaklaşık 2.16 metrede ortalama hata 0.604 metreden 0.340 metreye indi; bu yaklaşık %43 oranında bir düşüştü. Ekip farklı haritalama modlarını karşılaştırdığında, yalnızca kamera kullanan düzen kararlı bir harita oluşturmakta başarısız oldu ve düzeltilmemiş kamera verilerinin basitçe LiDAR ile birleştirilmesi bile zemini yanlışlıkla dolu işaretleyerek birçok sahte engel üretti. Bununla birlikte kalibre edilmiş füzyon daha keskin haritalar, daha düşük belirsizlik, lazerin tek başına kaçırdığı ince ve alçak engelleri tespit etme ve döngü-kapama doğruluğunda iyileşme sağladı; tüm bunlar gerçek zamanlı navigasyon için yeterince hızlı çalışırken gerçekleşti.
Gerçek Dünya Robotları İçin Anlamı
Pratik açıdan bu çalışma, pahalı, üst düzey sensörlere başvurmadan iç mekan robotlarını daha güvenli ve daha güvenilir hale getirmek için basit bir reçete sunuyor. Hassas ama sınırlı bir lazerin daha ucuz bir derinlik kamerasını “sessizce öğretmesine” izin verip ardından okumalarını ortak bir 2B ızgarada birleştirerek robot çevresinin daha dürüst bir görünümünü kazanıyor—özellikle boş raflar, tel örgü ve alçak nesneler gibi zorlayıcı özellikler için. Bu ek zekâ biraz hesaplama gücü gerektirir ve aşırı aydınlatma gibi bazı sorunları tamamen çözmez; yine de düşük maliyetli robotları, yoğun depolar, fabrikalar ve insanlar ile makinelerin zemini güvenle paylaşması gereken diğer iç mekanlarda gereken sağlam, güvenilir algılama türüne daha da yaklaştırır.
Atıf: Delhibabu, R., Zhukova, N.A. & Gizzatov, A. 2D grid map creation based on RGBD-camera and LiDAR data. Sci Rep 16, 10591 (2026). https://doi.org/10.1038/s41598-026-42698-3
Anahtar kelimeler: robot haritalama, sensör füzyonu, LiDAR, derinlik kamerası, kapalı alan navigasyonu