Clear Sky Science · ar
إنشاء خريطة شبكية ثنائية الأبعاد بناءً على بيانات كاميرا RGBD وLiDAR
خرائط روبوتية أذكى للمساحات اليومية
من روبوتات المستودعات التي تتفادى البالات إلى روبوتات المنازل التي تتخطى الأثاث، تحتاج الآلات المتحركة في العالم إلى خرائط جيدة للبقاء آمنة. ومع ذلك، فإن المستشعرات التي تستخدمها للرؤية—الماسحات الليزرية وكاميرات العمق—لها كل منها نقاط عمياء. توضح هذه الدراسة كيف أن الجمع بين ماسح ليزري بسيط وكاميرا عمق غير مكلفة، وتصحيح أخطاء الكاميرا تلقائياً أثناء التشغيل، يمكن أن يمنح الروبوتات الداخلية الصغيرة خرائط أوضح وأكثر أماناً لبيئاتها المحيطة.
لماذا تفشل المستشعرات الفردية في تلبية الحاجة
تعتمد الروبوتات اليوم غالباً على إما كاميرا عمق (تلتقط اللون والمسافة) أو ماسح ليزري (يقيس المسافة باستخدام نبضات ضوئية). كاميرات العمق رخيصة وصغيرة الحجم، لكنها تواجه صعوبات في الإضاءة الخافتة، أو الوهج الساطع، أو عند المسافات البعيدة، وقراءات المسافة لديها تنحرف تدريجياً عن الحقيقة مع زيادة المدى. أما الماسحات الليزرية فهي دقيقة للغاية وتعمل في الظلام، لكنها عادةً ما تستشعر شريحة أفقية رفيعة من العالم وقد تفوت أشياء تقع فوق أو تحت تلك المستوي، مثل البالات المنخفضة أو الأرفف المعلقة أو الهياكل المجوفة. بالإضافة إلى ذلك، تميل أنظمة الليزر لأن تكون أغلى وتتطلب حسابات أكبر. بمفردها، لا يوفر أي من نوعي المستشعرين الرؤية الغنية والموثوقة المطلوبة للمساحات الضيقة ومراكز اللوجستيات الداخلية المزدحمة.
دمج نظرتين في صورة أوضح واحدة
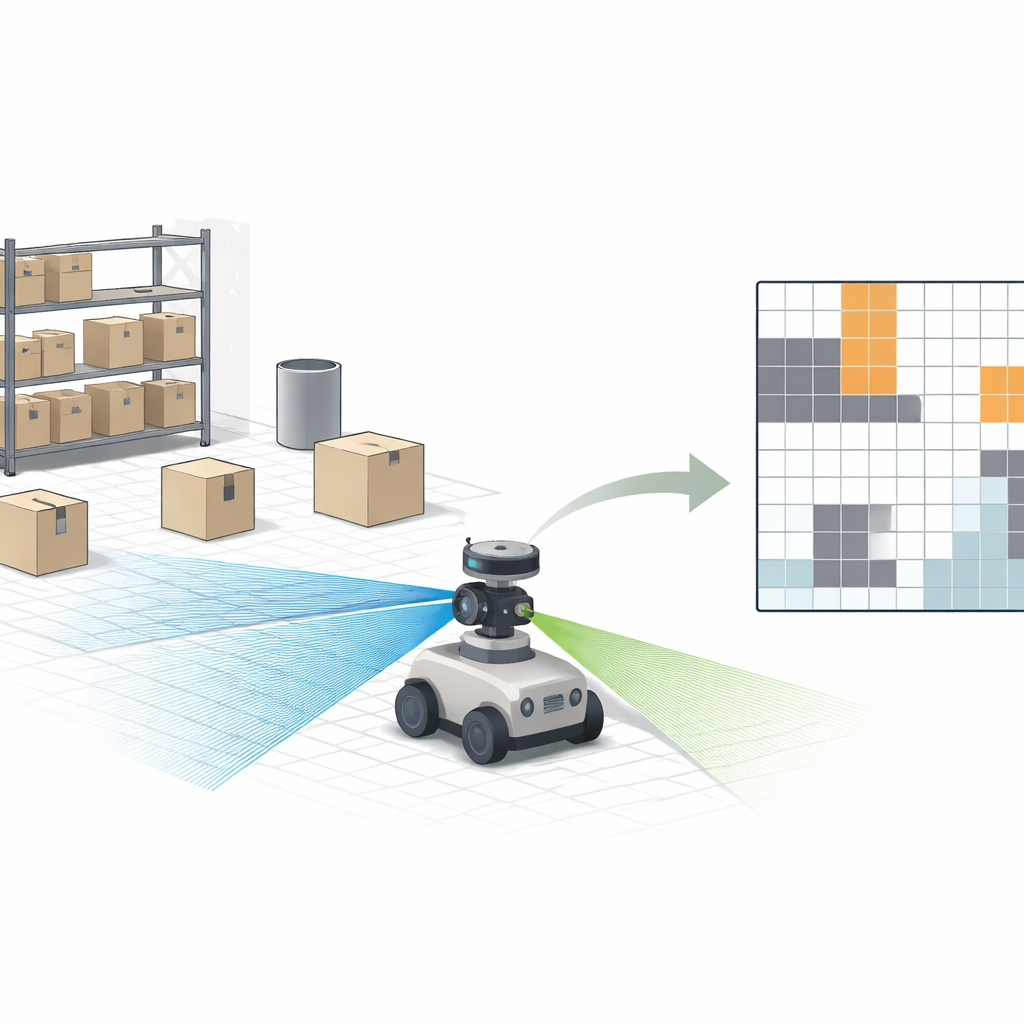
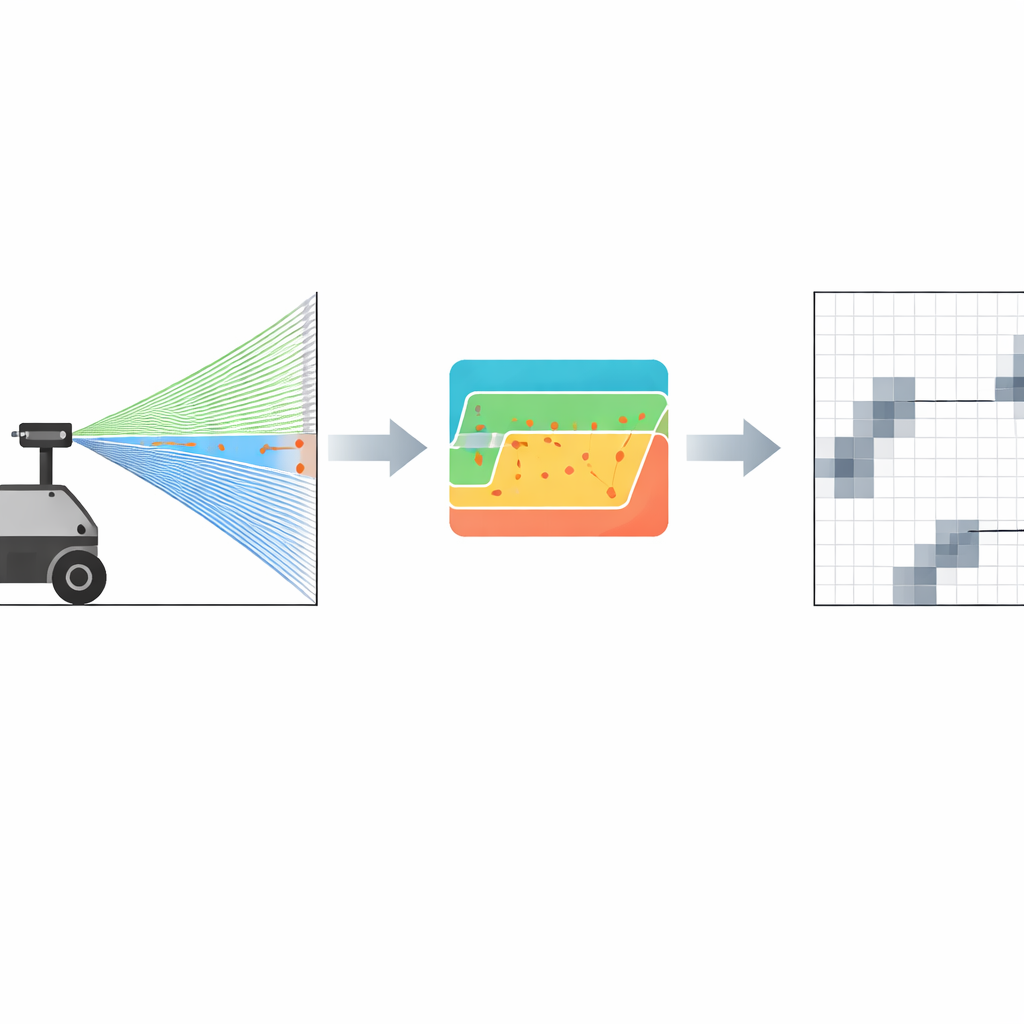
يتناول المؤلفون هذه الفجوة من خلال دمج نقاط القوة لكلا المستشعرين في خريطة شبكية ثنائية الأبعاد—نوع الخريطة الذي يُقسم فيه الطابق إلى مربعات صغيرة تُعلَّم كخالية أو محتلة. يحمل روبوتهم كاميرا RGBD منخفضة التكلفة (لون زائد عمق) وماسح LiDAR مستوٍ. أولاً، يوافقون جميع القياسات إلى إطار مرجعي مشترك، بحيث ينتهي أي نقطٍة تلتقطها الكاميرا أو الليزر في نفس الموضع على الخريطة. ثم، بدلاً من محاولة الاحتفاظ بنموذج ثلاثي الأبعاد كامل، يقومون بإسقاط النقاط الثلاثية الأبعاد ذات الصلة فقط على مستوى الأرض، مع ترشيح فوضى السقف والأرض. تُحدّث مخططية احتمالية كل خلية شبكية استناداً إلى مدى موثوقية كل مستشعر عند مسافة معينة: تُعامل قراءات الليزر على أنها موثوقة للغاية ضمن نطاق العمل، بينما يتلاشى تأثير الكاميرا تدريجياً مع المسافة مع ازدياد الضوضاء فيها.
ترك الليزر يصحح الكاميرا
ابتكار رئيسي هو خطوة معايرة خفيفة تتيح للروبوت تصحيح انحياز عمق الكاميرا باستمرار أثناء العمل. عندما يواجه الروبوت حائطاً مستوياً، يستخدم مسافة الليزر الدقيقة بالمليمتر كـ «حقيقة مرجعية». تقدّر إجراء مطابقة قوي المسافة الدقيقة لذلك الحائط من بيانات الليزر، حتى في وجود ضوضاء. ثم يقارن النظام هذا بما تقوله الكاميرا ويعدِّل إزاحة عمق واحدة بحيث يتطابق متوسط قراءة الكاميرا مع قراءة الليزر. والأهم أن هذه العملية لا تتطلب أنماط شطرنج معقدة، أو أذرع تحكم بالحركة، أو معايرة كاملة بست درجات حرية؛ يمكن تفعيلها بسرعة في مستودع حقيقي كلما كان سطح مستوٍ مناسب في مجال الرؤية. يقلل هذا الضبط الفوري مباشرةً من الأخطاء المنهجية في الكاميرا التي قد تتسبب خلاف ذلك في سوء تقدير الروبوت لمواقع العقبات.
من عمق أنقى إلى مسارات أكثر أماناً
قيّم الباحثون طريقتهم على روبوت صغير على طراز المستودعات مزود بجهازي ماسح ليزري منخفضي التكلفة وكاميرا عمق Intel RealSense. في اختبارات مضبوطة مقابل حقيقة الليزر، انخفض خطأ المسافة للكاميرا بشكل حاد بعد المعايرة—على سبيل المثال، عند نحو 2.16 متر، انخفض المتوسط من 0.604 متر إلى 0.340 متر، أي انخفاض بنحو 43 في المئة. عند مقارنة أوضاع التخطيط المختلفة، فشلت إعدادات الكاميرا فقط في بناء خريطة مستقرة، وحتى دمج بسيط لبيانات الكاميرا غير المصححة مع LiDAR أنتج العديد من العقبات الكاذبة، حيث وُسمت الأرض خطأً على أنها محتلة. أما الدمج المعاير فنتج خرائط أوضح مع عدم يقين أقل، واكتشف عقبات رفيعة ومنخفضة لم يلتقطها الليزر وحده، وحسّن دقة إغلاق الحلقات، وكل ذلك أثناء التشغيل بسرعة كافية للملاحة في الزمن الحقيقي.
ماذا يعني هذا لروبوتات العالم الحقيقي
عملياً، يقدم العمل وصفة بسيطة لجعل الروبوتات الداخلية أكثر أماناً وموثوقية دون اللجوء إلى مستشعرات باهظة وعالية المواصفات. من خلال السماح لليزر الدقيق لكنه محدود النطاق أن «يعلم» بهدوء كاميرا عمق أرخص، ثم دمج قراءاتهما في شبكة ثنائية الأبعاد مشتركة، يحصل الروبوت على صورة أكثر صدقاً لبيئته—خاصةً للميزات الدقيقة مثل الرفوف المجوفة، والشبك السلكي، والأجسام المنخفضة. وعلى الرغم من أن هذه الذكاء الإضافي يتطلب بعض قدرة الحوسبة ولا يحل تماماً مشاكل الإضاءة القصوى، فإنه يقرب الروبوتات منخفضة التكلفة من نوع الإدراك المتين والموثوق المطلوب للمستودعات والمصانع وغيرها من المساحات الداخلية المزدحمة حيث يجب أن يتشارك الناس والآلات الأرض بأمان.
الاستشهاد: Delhibabu, R., Zhukova, N.A. & Gizzatov, A. 2D grid map creation based on RGBD-camera and LiDAR data. Sci Rep 16, 10591 (2026). https://doi.org/10.1038/s41598-026-42698-3
الكلمات المفتاحية: رسم خرائط الروبوت, دمج المستشعرات, LiDAR, كاميرا عمق, الملاحة الداخلية