Clear Sky Science · ja
RGBDカメラとLiDARデータに基づく2Dグリッド地図作成
日常空間に対応するより賢いロボット地図
パレットを避けて走る倉庫ロボットから家具の周りをすり抜ける家庭用ロボットまで、世界を移動する機械は安全を保つために良好な地図を必要とします。しかし、それらが世界を見るために使うセンサー——レーザースキャナや深度カメラ——にはそれぞれ盲点があります。本研究は、安価なレーザースキャナと手頃な深度カメラを組み合わせ、カメラの誤差を自動的にその場で補正することで、小型屋内ロボットが周囲の環境をより明瞭で安全に把握できることを示しています。
単体センサーの限界
今日のロボットはしばしば、色と距離を同時に取得する深度カメラか、光パルスで距離を測るレーザースキャナのいずれかに頼っています。深度カメラは安価でコンパクトですが、暗い環境や強いまぶしさ、数メートル先を超える距離では性能が落ち、距離測定はレンジに応じて徐々に真値からずれていきます。これに対しレーザースキャナは極めて精密で暗闇でも動作しますが、通常は世界の薄い水平断面しか感知せず、低いパレットや突き出した棚、空洞構造物のようにその平面より上や下にある物体を見落としがちです。さらにレーザーシステムは一般に高価で計算負荷も大きくなりがちです。単独では、狭い空間や混雑した屋内物流拠点で求められる豊かで信頼できる視界は提供できません。
二つの視点を一つの明瞭な図に融合する
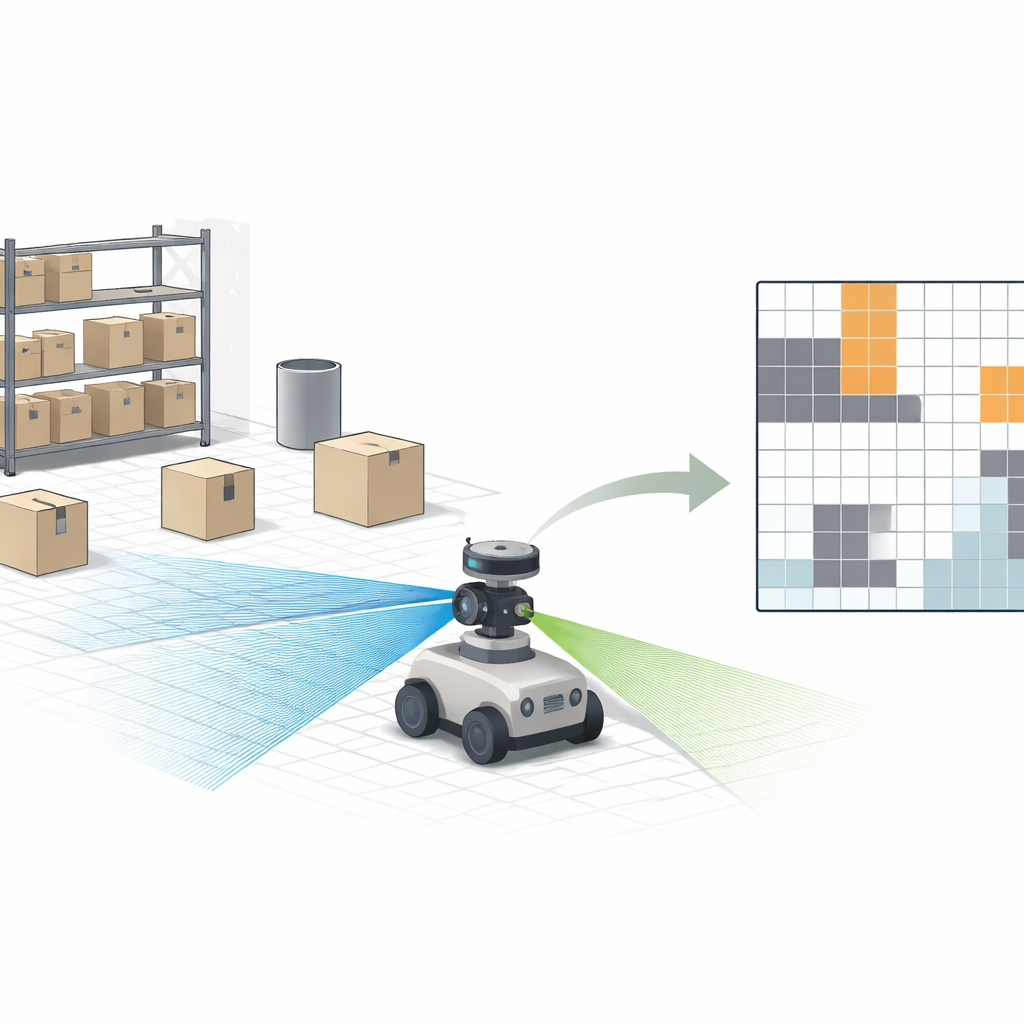
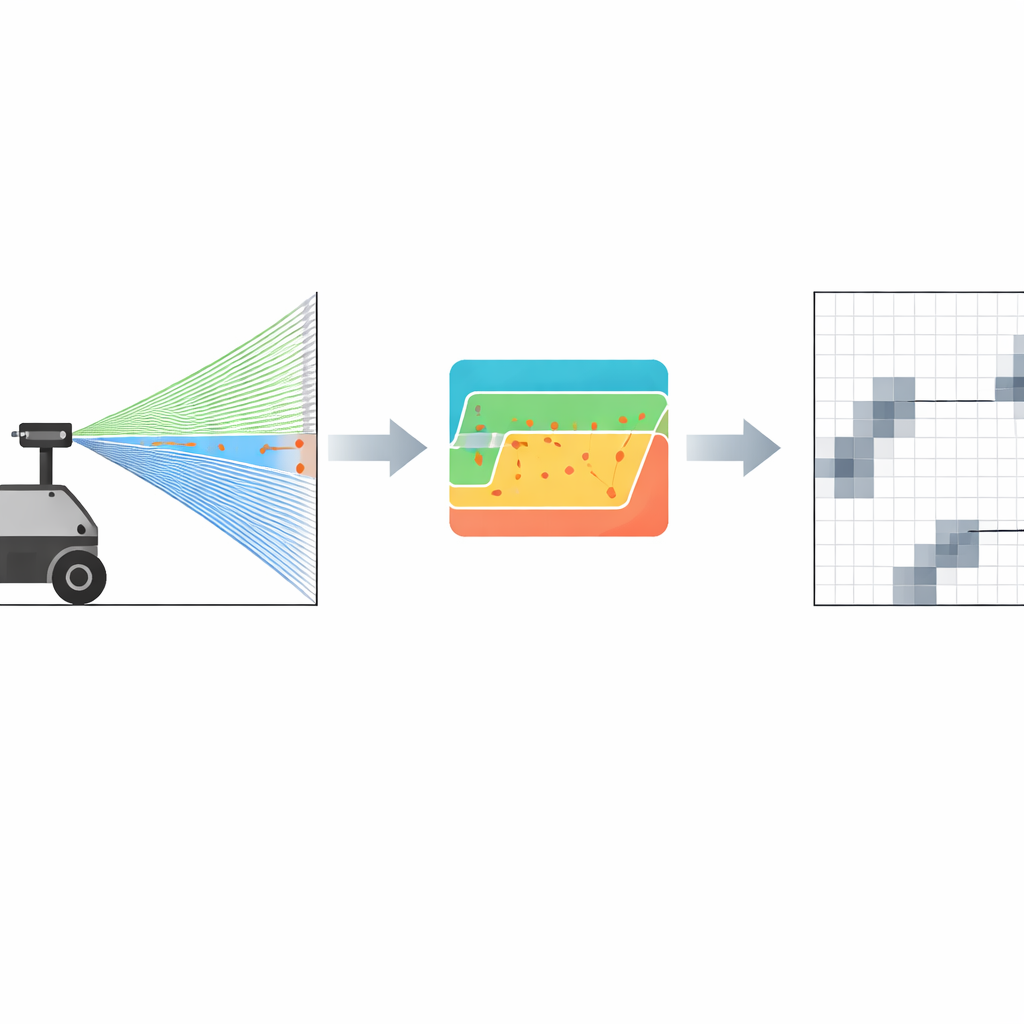
著者らは、両センサーの長所を単一の2Dグリッド地図に融合することでこのギャップに取り組みます。ここでいうグリッド地図とは、床を小さなマスに分割し、それぞれが自由(通行可)か占有(障害物あり)かを示すタイプの地図です。ロボットには低コストのRGBD(カラー+深度)カメラと平面LiDARスキャナが搭載されています。まず、カメラやレーザーで得られた全ての測定を共通の基準座標に整合させ、どちらのセンサーで見えた点も地図上で同じ位置に対応するようにします。その後、完全な3Dモデルを保持する代わりに、床面に関係する3D点のみを投影して天井や床のゴミを除去します。確率的なスキームにより、各グリッドセルは距離に応じた各センサーの信頼度に基づいて更新されます。レーザーの読みは作業レンジ内で高信頼として扱われ、カメラの影響は距離が増すにつれてノイズの増加に応じて穏やかに薄れていきます。
レーザーでカメラを補正する
重要な革新は、ロボットが現場でカメラの深度バイアスを継続的に補正できる軽量な校正ステップです。ロボットが平坦な壁に向いたとき、レーザーのミリ単位の高精度距離を「真値」として使用します。ロバストなフィッティング手法により、ノイズがある状況でもレーザーデータからその壁までの正確な距離を推定します。システムはこれをカメラが報告する距離と比較し、カメラの平均読みがレーザーに一致するように単一の深度オフセットを調整します。重要なのは、このプロセスがチェッカーボードパターンや動作制御されたアーム、6自由度の完全なキャリブレーションを必要としないことです。適当な平面が視界に入ったときに倉庫内で素早くトリガーできます。このオンザフライの調整は、さもなければロボットが障害物の位置を誤認する原因となる系統的なカメラ誤差を直接的に低減します。
より正確な深度から安全な経路へ
研究者たちは、2台の低コストレーザースキャナとIntel RealSense深度カメラを搭載した小型倉庫型ロボットで手法を評価しました。レーザーの真値と比較した制御実験では、校正後にカメラの距離誤差が大きく低下しました。例えば約2.16メートル付近で、平均誤差は0.604メートルから0.340メートルへと約43%減少しました。異なるマッピングモードを比較したところ、カメラのみの構成では安定した地図が構築できず、未補正のカメラデータをそのままLiDARと融合すると床が誤って占有とマークされるなど多くの誤認障害物が生じました。しかし、校正された融合では不確かさが低く、より鮮明な地図が生成され、レーザー単独では見落とす薄く低い障害物を検出し、ループクロージャ精度も向上しました。しかもリアルタイムナビゲーションに十分な速度で動作します。
実世界のロボットにとっての意義
実務上、この研究は高価で高性能なセンサーに頼らずに屋内ロボットをより安全で信頼できるものにするためのシンプルな手法を提供します。精密だが視野が限られるレーザーが安価な深度カメラを密かに“教える”ことで、両者の読みを共通の2Dグリッドに統合すれば、空洞ラックやワイヤメッシュ、低い物体といった扱いにくい特徴についてロボットはより正直な環境像を得られます。この追加の知能は多少の計算資源を要し、極端な照明条件のような問題を完全には解決しませんが、低コストロボットを、人と機械が同じ床を安全に共有しなければならない忙しい倉庫や工場、その他の屋内空間で求められる堅牢で信頼できる知覚に近づけます。
引用: Delhibabu, R., Zhukova, N.A. & Gizzatov, A. 2D grid map creation based on RGBD-camera and LiDAR data. Sci Rep 16, 10591 (2026). https://doi.org/10.1038/s41598-026-42698-3
キーワード: ロボット地図作成, センサー融合, LiDAR, 深度カメラ, 屋内ナビゲーション