Clear Sky Science · nl
2D-roosterkaart maken op basis van RGBD-camera- en LiDAR-gegevens
Slimmere robotkaarten voor alledaagse ruimtes
Van magazijnrobots die pallets ontwijken tot huishoudrobots die om meubels heen bewegen: mobiele machines hebben goede kaarten nodig om veilig te blijven. De sensoren die ze gebruiken om te zien — laserscanners en dieptecamera’s — hebben echter elk hun blinde vlekken. Deze studie laat zien hoe het combineren van een eenvoudige laserscanner met een goedkope dieptecamera, en het automatisch corrigeren van de camerafouten onderweg, kleine binnenshuisrobots helderdere en veiligere kaarten van hun omgeving kan geven.
Waarom enkele sensoren tekortschieten
Huidige robots vertrouwen vaak op ofwel een dieptecamera (die kleur en afstand ziet) of een laserscanner (die afstand meet met lichtpulsen). Dieptecamera’s zijn goedkoop en compact, maar hebben moeite bij weinig licht, felle schittering of op grotere afstanden, en hun afstandsmetingen lopen geleidelijk uit de pas naarmate het bereik toeneemt. Laserscanners daarentegen zijn uiterst precies en werken in het donker, maar ze nemen meestal slechts een dunne horizontale laag van de wereld waar en kunnen objecten missen die boven of onder dat vlak zitten, zoals lage pallets, uitsteeksels op planken of holle structuren. Bovendien zijn lasersystemen vaak duurder en rekentechnisch zwaarder. Geen van beide sensortypen levert op zichzelf de rijke, betrouwbare waarneming die nodig is voor krappe ruimtes en drukke, indoor logistieke hubs.
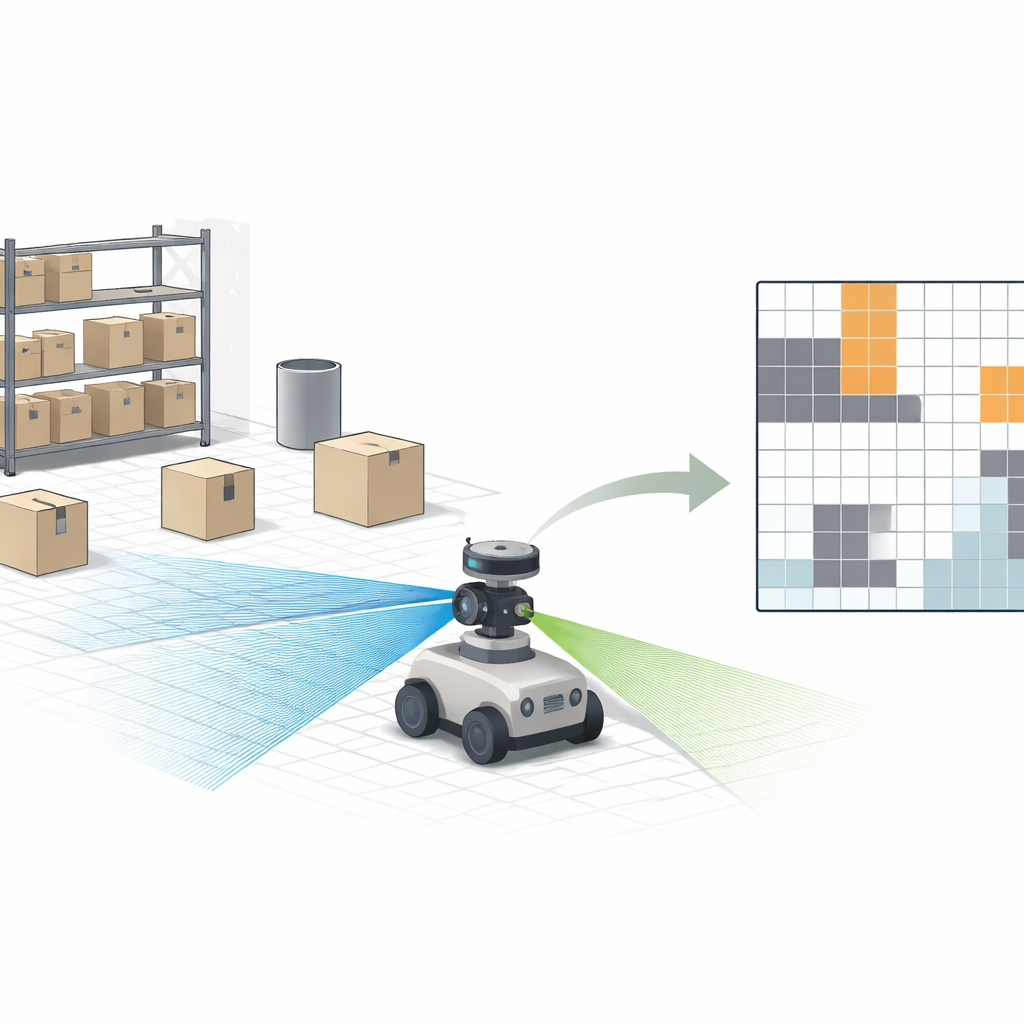
Twee gezichtspunten samensmelten tot één helder beeld
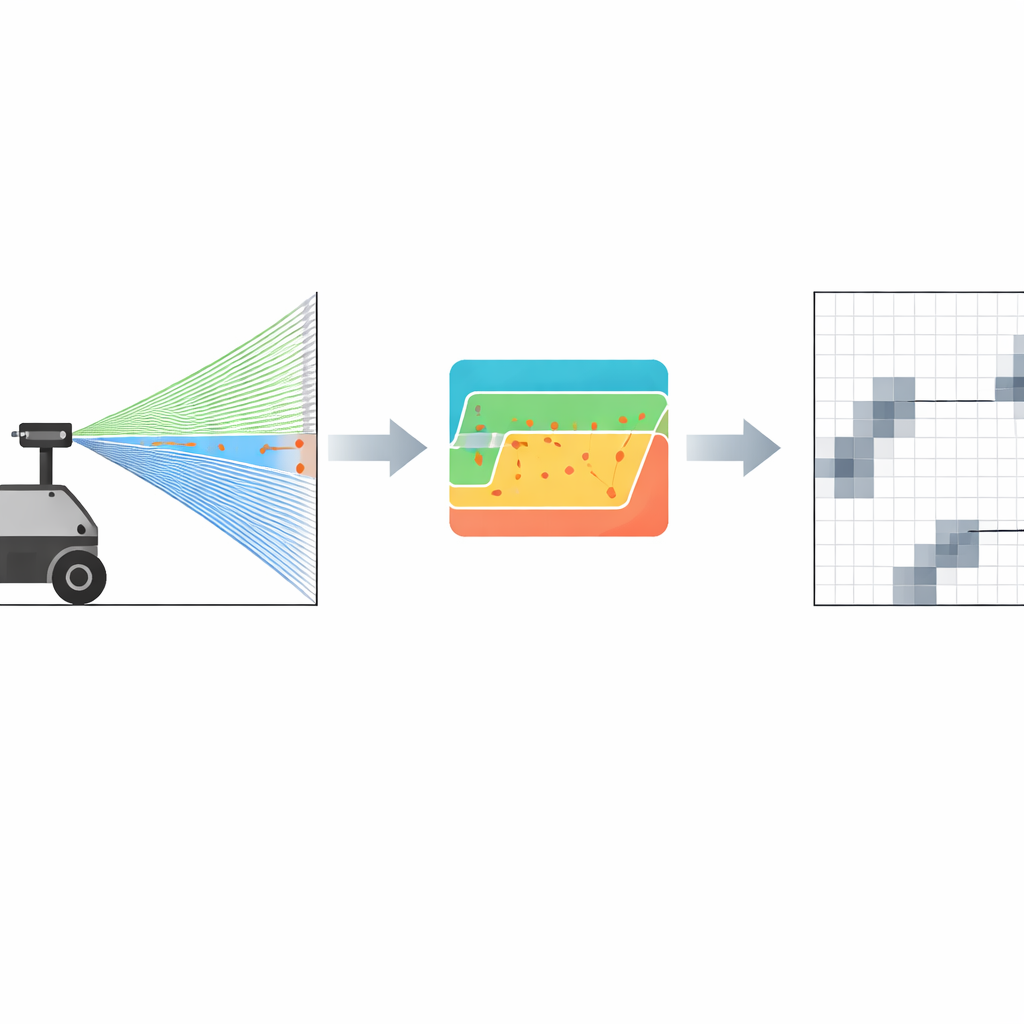
De auteurs pakken deze kloof aan door de sterke punten van beide sensoren te combineren in één 2D-roosterkaart — het soort kaart waarbij de vloer is verdeeld in kleine vakjes die als vrij of bezet worden gemarkeerd. Hun robot draagt een goedkope RGBD (kleur plus diepte) camera en een planaire LiDAR-scanner. Eerst lijnen ze alle metingen uit in één gemeenschappelijk referentiekader, zodat een punt dat de camera of de laser ziet op dezelfde plaats in de kaart belandt. Vervolgens, in plaats van te proberen een volledig 3D-model bij te houden, projecteren ze alleen de relevante 3D-punten op het vloeroppervlak en filteren ze rommel aan plafond en vloer weg. Een probabilistisch schema werkt elke roostercel bij op basis van hoe betrouwbaar iedere sensor is op een gegeven afstand: de lasermetingen worden als zeer betrouwbaar beschouwd binnen het werkbereik, terwijl de invloed van de camera geleidelijk afneemt met de afstand naarmate het ruisniveau toeneemt.
De laser de camera laten corrigeren
Een belangrijke innovatie is een lichte kalibratiestap waarmee de robot continu de diepte-bias van de camera in het veld kan corrigeren. Wanneer de robot een vlakke muur in het vizier heeft, gebruikt hij de millimeternauwkeurige afstand van de laser als "grondwaarheid." Een robuuste fittingprocedure schat de precieze afstand tot die muur uit de lasergegevens, zelfs in aanwezigheid van ruis. Het systeem vergelijkt dit vervolgens met wat de camera aangeeft en past één diepte-offset aan zodat de gemiddelde lezing van de camera overeenkomt met die van de laser. Cruciaal is dat dit proces geen uitgebreide schaakbordpatronen, beweginggestuurde armen of volledige zes-vrijheidsgradenkalibratie vereist; het kan snel worden geactiveerd in een echt magazijn telkens wanneer een geschikt vlak oppervlak in beeld komt. Deze on-the-fly afstelling vermindert direct systematische camerafouten die anders zouden zorgen dat de robot obstakels verkeerd inschat.
Van schonere diepte naar veiligere paden
De onderzoekers evalueerden hun methode op een kleine magazijnachtige robot uitgerust met twee goedkope laserscanners en een Intel RealSense dieptecamera. In gecontroleerde tests tegenover de laser-‘grondwaarheid’ daalde de afstandsfout van de camera sterk na kalibratie — bijvoorbeeld rond 2,16 meter daalde de gemiddelde fout van 0,604 meter naar 0,340 meter, een vermindering van ongeveer 43 procent. Toen het team verschillende mapmodi vergeleek, slaagde een alleen-camera-opstelling er niet in een stabiele kaart te bouwen, en zelfs een naïeve fusie van ongecorrigeerde cameragegevens met LiDAR produceerde veel valse obstakels doordat de vloer ten onrechte als bezet werd gemarkeerd. De gekalibreerde fusie produceerde daarentegen scherpere kaarten met lagere onzekerheid, detecteerde dunne en laaggelegen obstakels die de laser alleen miste, en verbeterde de nauwkeurigheid van loop-closure, terwijl het snel genoeg draaide voor navigatie in realtime.
Wat dit betekent voor robots in de praktijk
In praktische zin biedt dit werk een eenvoudig recept om binnenshuisrobots veiliger en betrouwbaarder te maken zonder te hoeven vertrouwen op dure, high-end sensoren. Door een precieze maar beperkte laser een goedkopere dieptecamera stilletjes te laten "leren" en vervolgens hun metingen te combineren in een gemeenschappelijke 2D-roosterkaart, krijgt de robot een eerlijker beeld van zijn omgeving — vooral voor lastige kenmerken zoals holle rekken, gaas en lage objecten. Hoewel deze extra intelligentie wat rekenkracht kost en niet alle problemen zoals extreme verlichting volledig oplost, brengt het goedkope robots dichter bij de robuuste, betrouwbare waarneming die nodig is in drukke magazijnen, fabrieken en andere binnenruimtes waar mensen en machines de vloer veilig moeten delen.
Bronvermelding: Delhibabu, R., Zhukova, N.A. & Gizzatov, A. 2D grid map creation based on RGBD-camera and LiDAR data. Sci Rep 16, 10591 (2026). https://doi.org/10.1038/s41598-026-42698-3
Trefwoorden: robotmapping, sensorfusie, LiDAR, dieptecamera, binnennavigatie