Clear Sky Science · he
יצירת מפה רשת דו־ממדית על בסיס נתוני מצלמת RGBD ולידאר
מפות רובוט חכמות יותר למרחבים יומיומיים
ממסופי מחסנים שמתחמקים מפלטות ועד רובוטי בית העוקפים רהיטים — מכונות הנעות בעולם זקוקות למפות טובות כדי להישאר בטוחות. עם זאת, החיישנים שבהם הן משתמשות כדי "לראות" — סורקי לייזר ומצלמות עומק — לכל אחד יש נקודות עיוורון. המחקר הזה מראה כיצד שילוב סורק לייזר פשוט עם מצלמת עומק זולה, ותיקון אוטומטי של הטייה בעומק של המצלמה בזמן אמת, יכולים לספק לרובוטים קטנים הפועלים פנימית מפות סביבה ברורות ובטוחות יותר.
מדוע חיישן יחיד לא מספיק
רוב הרובוטים כיום מסתמכים או על מצלמת עומק (שקולטת צבע ומרחק) או על סורק לייזר (שמדוד מרחק באמצעות פולסי אור). מצלמות עומק זולות וקומפקטיות, אך הן מתקשות באור נמוך, בזוהר חזק או מעבר למספר מטרים, וקריאות המרחק שלהן מתדרדרות ככל שהטווח גדל. סורקי לייזר, לעומת זאת, מדויקים מאוד ופועלים בחושך, אך לרוב סורקים רק חתך אופקי דק של הסביבה ויכולים לפספס עצמים שמעל או מתחת למישור הזה, כמו פלטות נמוכות, מדפים תלויים או מבנים חלולים. בנוסף, מערכות לייזר נוטות להיות יקרות יותר ותובעניות חישובית. אף אחד מהחיישנים לבדם לא מספק את התצפית העשירה והאמינה הנדרשת למרחבים צפופים ולמרכזי לוגיסטיקה פנימיים.
מיזוג שתי תצפיות לתמונה אחת ברורה
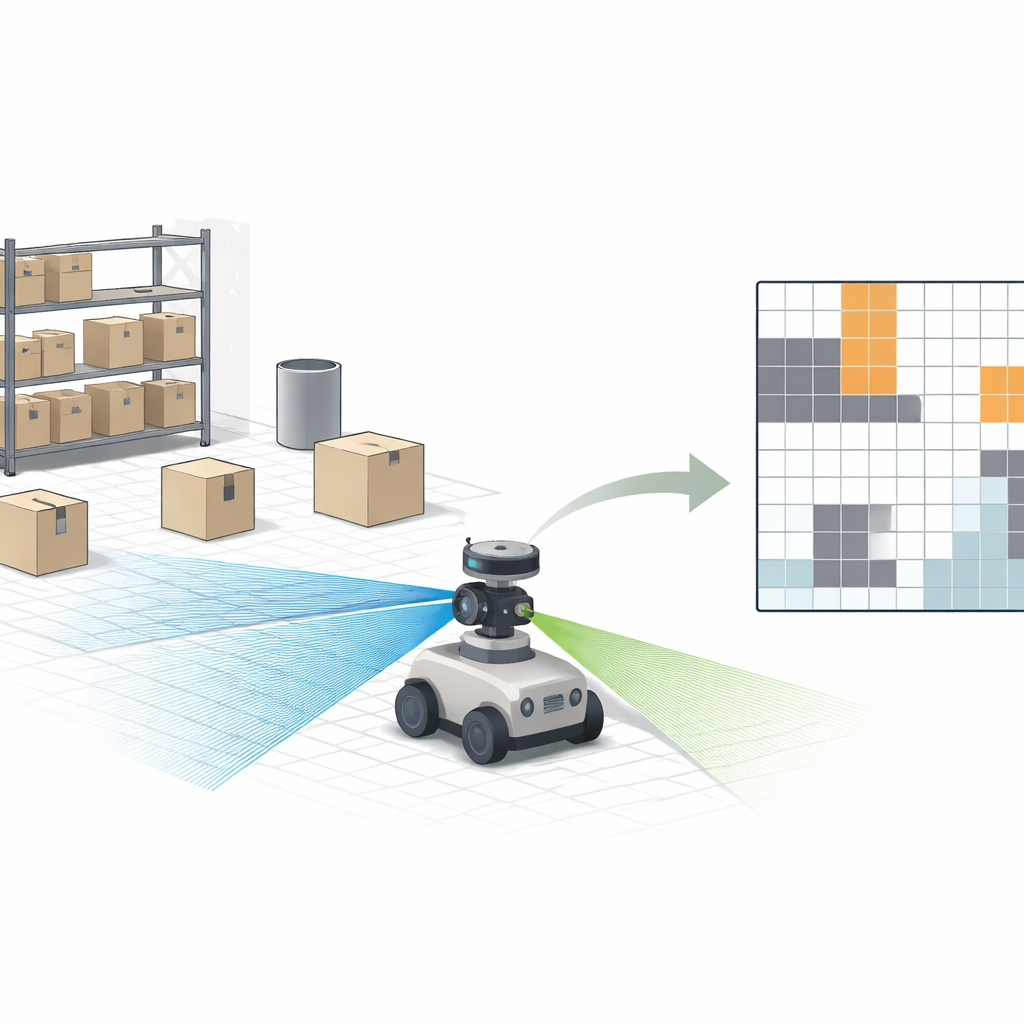
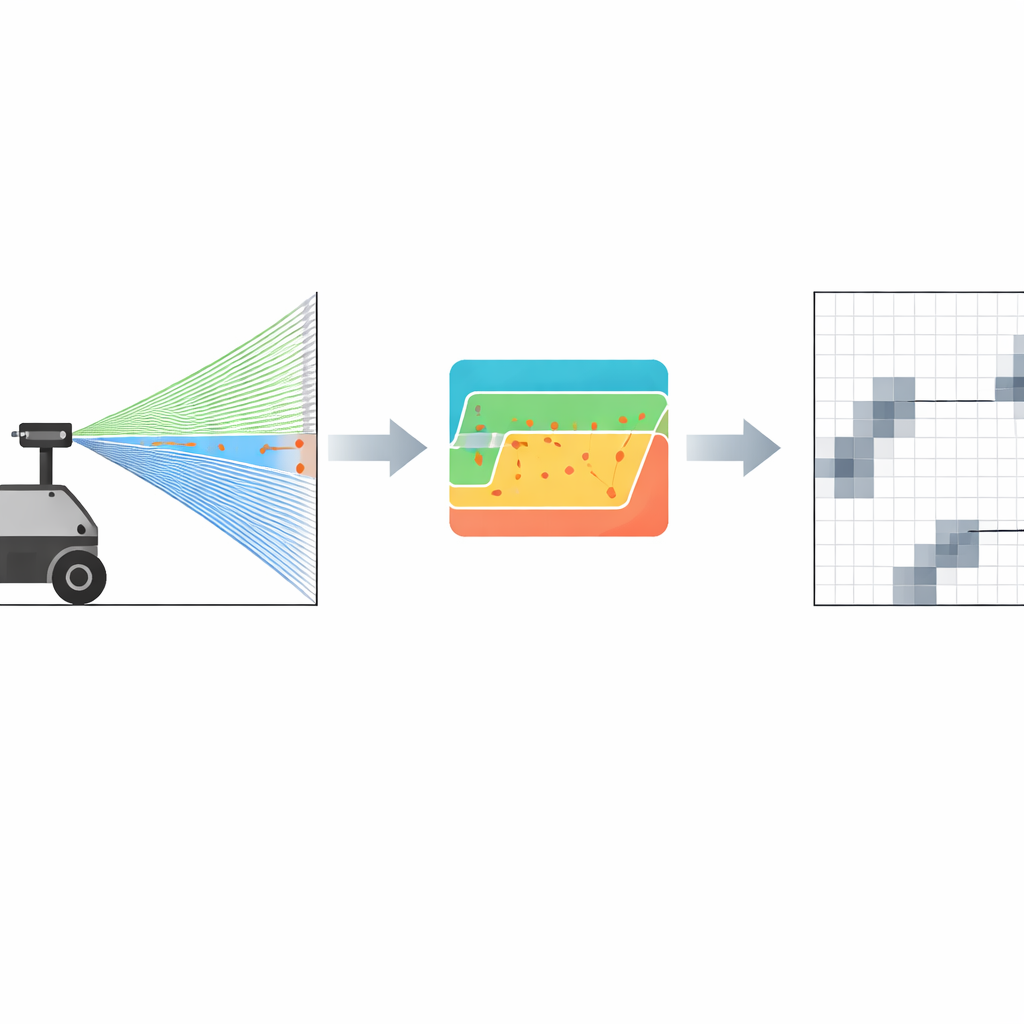
המחברים מטפלים בחוסר הזה על ידי מיזוג חוזקות שני החיישנים לתוך מפה רשת דו־ממדית — המפה שבה הרצפה מחולקת לריבועים קטנים המסומנים כפנויים או כבושים. הרובוט נושא מצלמת RGBD זולה וסורק לייזר מישורי. ראשית, הם מיישרים את כל המדידות למסגרת ייחוס משותפת, כך שנקודה הנראית במצלמה או בלייזר תופיע באותו המקום על המפה. במקום לשמור מודל תלת־ממדי מלא, הם מקרינים רק את נקודות התלת־ממד הרלוונטיות במישור הרצפה ומסננים רעש מהתקרה ומהרצפה. סכימה הסתברותית מעדכנת כל תא ברשת בהתאם לאמינות כל חיישן במרחק נתון: קריאות הלייזר מטופלות ככלי אמין בטווח הפעולה, בעוד השפעת המצלמה דועכת בעדינות עם המרחק ככל שרעשיה גדלים.
להשאיר ללייזר לתקן את המצלמה
חידוש מרכזי הוא שלב כיול קל משקל שמאפשר לרובוט לתקן ברצף את הסטייה בעומק של המצלמה בשטח. כשהרובוט עומד מול קיר שטוח, הוא משתמש במדידת המרחק המדויקת במילימטר של הלייזר כ"אמת קרקעית". הליך התאמה חסין (robust fitting) מעריך את המרחק המדויק לקיר מתוך נתוני הלייזר, גם בנוכחות רעש. המערכת משווה זאת למה שהמצלמה מדווחת ומכיילת התאמת הזזת עומק יחידה כך שהקריאה הממוצעת של המצלמה תתאים לזו של הלייזר. חשוב: התהליך הזה אינו דורש דפוסי שבבצ'ר או זרועות מבוקרות תנועה או כיול מלא בשש דרגות חופש — הוא ניתן להפעיל במהירות במחסן אמיתי כאשר משטח שטוח מתאים נמצא בשדה הראייה. כוונון בזמן אמת זה מפחית במישרין טעויות מערכתיות של המצלמה שהיו גורמות לרובוט לשגות במיקום המכשולים.
מעומק נקי לנתיבים בטוחים יותר
החוקרים העריכו את השיטה על רובוט קטן בסגנון מחסן המצויד בשני סורקי לייזר זולים ומצלמת Intel RealSense. במבחנים מבוקרים מול אמת הלייזר, שגיאת המרחק של המצלמה צנחה באופן חד לאחר הכיול — למשל, בכ־2.16 מטרים השגיאה הממוצעת ירדה מ‑0.604 מטרים ל‑0.340 מטרים, קיטון של כ‑43 אחוז. בהשוואת מצבי מיפוי שונים, תצורת מצלמה בלבד נכשלה בבניית מפה יציבה, ואפילו מיזוג נאיבי של נתוני מצלמה לא מכוילים עם לידאר ייצר מכשולים כוזבים רבים כאשר הרצפה סומנה בטעות ככבושה. המיזוג המכויל, לעומת זאת, סיפק מפות חדות יותר עם אי־ודאות נמוכה יותר, גילה מכשולים דקים ונמוכים שהלייזר לבדו פספס ושיפר את דיוק סגירת הלולאה, וכל זאת תוך הרצה מהירה דיה לנווט בזמן אמת.
מה המשמעות לרובוטים במציאות
ברמה הפרקטית, העבודה מציעה מתכון פשוט להפיכת רובוטים פנימיים לבטוחים ואמינים יותר מבלי להסתמך על חיישנים יקרים וקדמתיים. על ידי מתן אפשרות ללייזר מדויק אך מוגבל "ללמד" בשקט מצלמת עומק זולה, ואז שילוב הקריאות שלהם במפה דו־ממדית משותפת, הרובוט רוכש תמונה מדויקת יותר של סביבתו — במיוחד עבור תכונות בעייתיות כמו מדפים חלולים, רשתות חוט ומשטחים נמוכים. על אף שהאינטליגנציה הנוספת דורשת כוח מחשוב מסוים ואינה פותרת כל בעיית תאורה קיצונית, היא מקרבת רובוטים זולים יותר לתפיסה איתנה ומהימנה הנדרשת למחסנים, מפעלים ומרחבים פנימיים אחרים שבהם אנשים ומכונות חולקים את הרצפה בבטחה.
ציטוט: Delhibabu, R., Zhukova, N.A. & Gizzatov, A. 2D grid map creation based on RGBD-camera and LiDAR data. Sci Rep 16, 10591 (2026). https://doi.org/10.1038/s41598-026-42698-3
מילות מפתח: מיפוי רובוטי, מיזוג חיישנים, לידאר, מצלמת עומק, ניווט פנימי