Clear Sky Science · ru
SPHTRLM: защищённый и сохраняющий приватность метод обучения с подкреплением с подбором гиперпараметров для поиска пути роботом в динамических средах
Роботы, которые учатся в движении
Представьте себе складского робота, который должен лавировать среди постоянно перемещающихся стопок коробок, при этом защищая данные клиентов. В этой статье представлен новый подход, позволяющий таким роботам вырабатывать лучшие маршруты в оживлённых, меняющихся пространствах, одновременно оберегая чувствительную информацию, с которой они сталкиваются. Работа демонстрирует, как объединить интеллектуальное обучение, безопасную навигацию и надёжную приватность в одной практичной системе.
Почему подвижные роботы сталкиваются с трудным выбором
Роботы, перемещающиеся в пространстве, вынуждены постоянно принимать решения: куда идти дальше, какое препятствие объехать и как быстро достигнуть цели, не столкнувшись. Классические методы планирования хорошо работают, если среда почти не меняется и заранее промаплена, но испытывают трудности, когда люди, тележки или другие роботы движутся непредсказуемо. Современное обучение с подкреплением позволяет роботу совершенствоваться методом проб и ошибок, но обычно требует значительной тонкой настройки и открытого доступа ко всем собираемым данным. Это порождает две большие проблемы для реальных развертываний: обучение может становиться нестабильным в быстро меняющихся условиях, а данные — раскрывать чувствительные сведения о локациях, людях или операциях.
Единая система для безопасного и приватного обучения
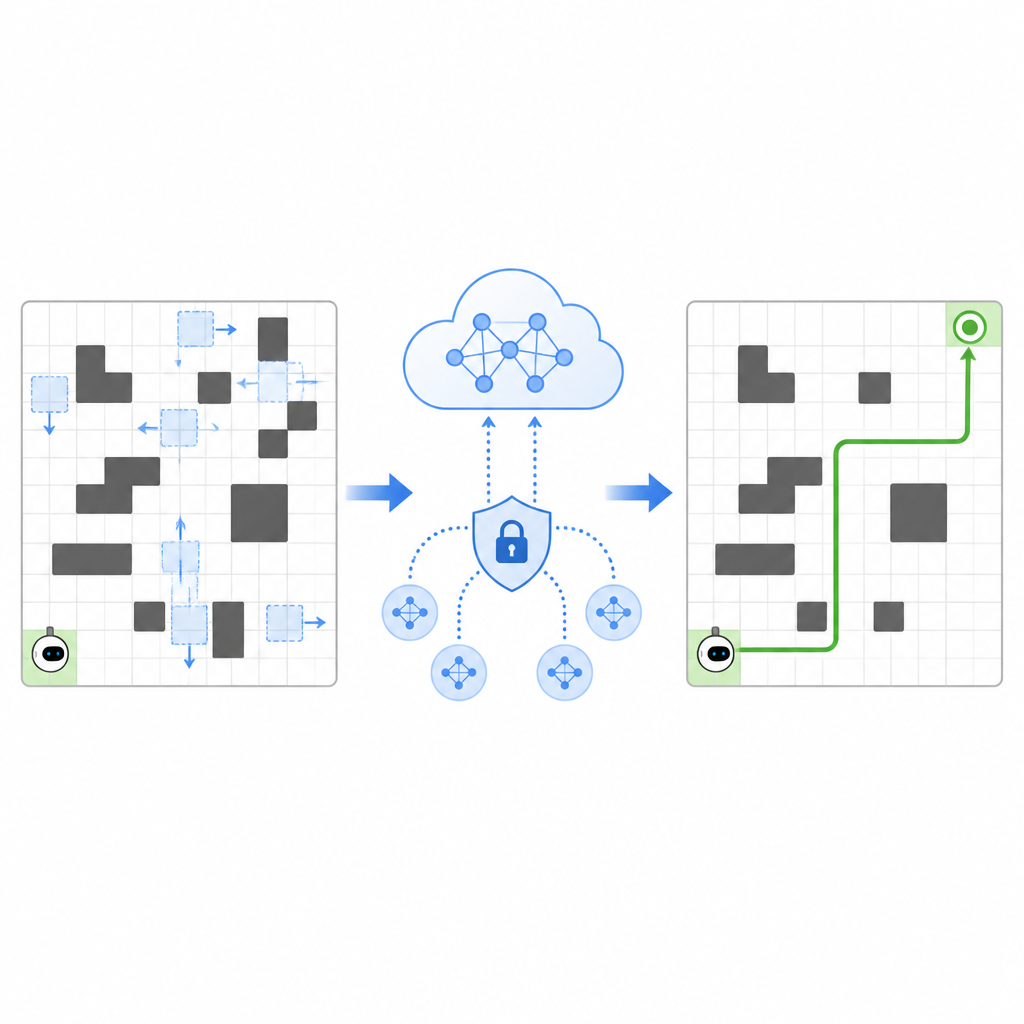
Авторы предлагают фреймворк под названием SPHTRLM, который одновременно решает задачи качества навигации, стабильности обучения и приватности. В их настройке робот перемещается по сетке, выбирая простые шаги вверх, вниз, влево или вправо, в то время как позиции препятствий и целей меняются со временем. Система вознаграждает робота за приближение к цели, наказывает за столкновения с препятствиями и мягко стимулирует изучать новые маршруты, а не застревать в привычках. Важная деталь: эти вознаграждения не фиксированы, а адаптируются в зависимости от плотности пространства и эффективности движения робота, что помогает сохранять работоспособность по мере смены условий.
Делиться опытом, не раскрывая секреты
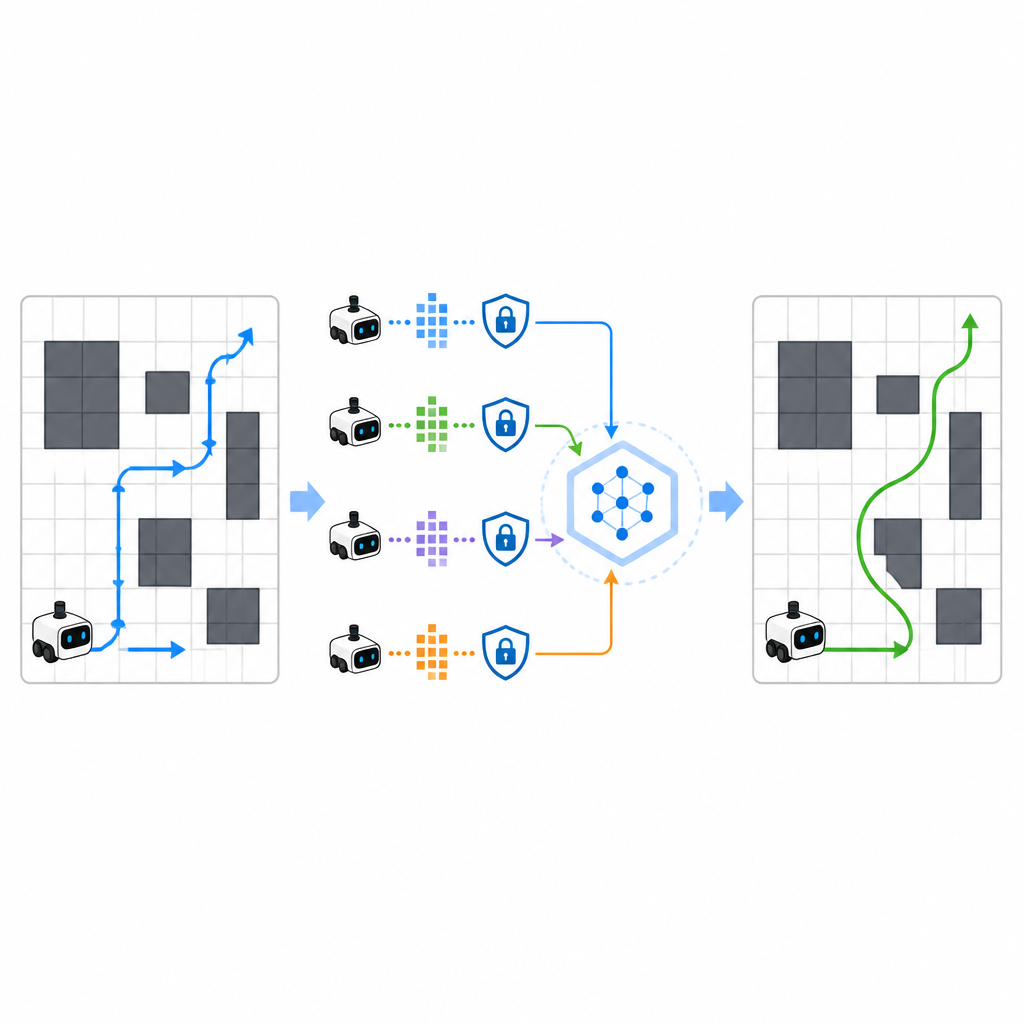
Чтобы ускорить обучение, SPHTRLM позволяет нескольким роботам или агентам учиться параллельно и обмениваться тем, что они узнали. Вместо отправки сырых карт или детализированных траекторий на центральный сервер каждый робот хранит свой опыт локально и периодически пересылает компактные зашифрованные сводки полученных знаний. Приёмами из федеративного обучения эти сводки объединяются в более мощную общую стратегию, которая затем возвращается роботам. Дополнительно в данные добавляется контролируемый шум, чтобы скрыть тонкие детали, а тщательно подобранное шифрование обеспечивает, что даже при перехвате обновлений злоумышленнику будет сложно восстановить, где роботы ходили и что они видели.
Быстрее учится, короче пути, меньше столкновений
В компьютерных экспериментах на сетке 10×10, заполненной движущимися препятствиями, SPHTRLM сравнивали с несколькими популярными методами обучения. Он достигал цели примерно в девяносто пяти процентах тестовых запусков, превосходя стандартный Q-learning и базовые подходы глубокого обучения с подкреплением. Найденные маршруты в среднем были короче примерно на двадцать–двадцать пять процентов, то есть робот тратил меньше времени на блуждание. Кроме того, поведение сходилось к хорошим стратегиям примерно на треть быстрее, а уровень столкновений снижался до очень низкого значения даже при высокой загруженности сетки. Несмотря на дополнительные шаги по защите данных, среднее время принятия решения оставалось в пределах нескольких сотых долей секунды, что подходит для управления в реальном времени.
Оставлять нападающих в неведении
Исследование также проверяло, насколько хорошо фреймворк противостоит атакам, направленным на вывод использованных маршрутов во время обучения или реконструкцию чувствительных траекторий. При тестировании стандартных атак на приватность авторы обнаружили, что SPHTRLM удерживает вероятность успеха таких атак ниже пяти процентов, что близко к случайному угадыванию. Эта защита достигается сочетанием зашифрованных обновлений, ограниченного обмена информацией и целенаправленного шума в сигналах обучения. При этом навигационные характеристики оставались сильными, что указывает на возможность защищать приватность без нанесения вреда способности робота учиться.
Что это значит для реальных роботов
Для неспециалистов ключевая мысль такова: теперь роботов можно обучать безопасно и эффективно перемещаться в меняющихся средах, не раскрывая всего, что они воспринимают и решают. SPHTRLM демонстрирует, как объединить обучение, настройку и приватность в единую конструкцию, укладывающуюся в реальные вычислительные ограничения. Это приближает приватно-ориентированных складских роботов, сервисных роботов в больницах и инспекционных дронов на охраняемых объектах к повседневному использованию, где они могут адаптироваться на ходу, при этом уважая информацию, с которой сталкиваются.
Цитирование: Dewangan, R.R., Thombre, D., Parganiha, V. et al. SPHTRLM: secure and privacy-preserving hyperparameter-tuned reinforcement learning method for robot path finding in dynamic environments. Sci Rep 16, 16114 (2026). https://doi.org/10.1038/s41598-026-48141-x
Ключевые слова: навигация роботов, обучение с подкреплением, конфиденциальный ИИ, федеративное обучение, динамические среды