Clear Sky Science · zh
基于语义分类的器械分类简化了机器人手术客观性能指标的运动学分析
为何更智能的机器人数据在手术室很重要
机器人手术如今通过微小切口帮助医生完成许多常见手术,随着机械臂的运动,会产生大量的运动数据。该研究表明,将这些数据按照每件器械实际执行的工作来重组,可以大大简化对外科技能的评判、指导培训,并最终支持更安全的病人手术。
从直觉到数据驱动的技能评估
多年来,外科医生的技术能力主要由其他人观摩并评分来判断。这些人工评估有用但耗时,评审者之间可能存在差异,而且很少提供即时反馈。现代机器人记录器械的每一次转动与位移,以及视频和系统事件。这些测量,称为性能指标,已经有助于区分新手与专家,并将他们的手部动作与术后病人表现联系起来。问题在于,现在有一百多种不同的指标,其中许多难以解释且很少被使用。

为每件器械指派清晰的职位
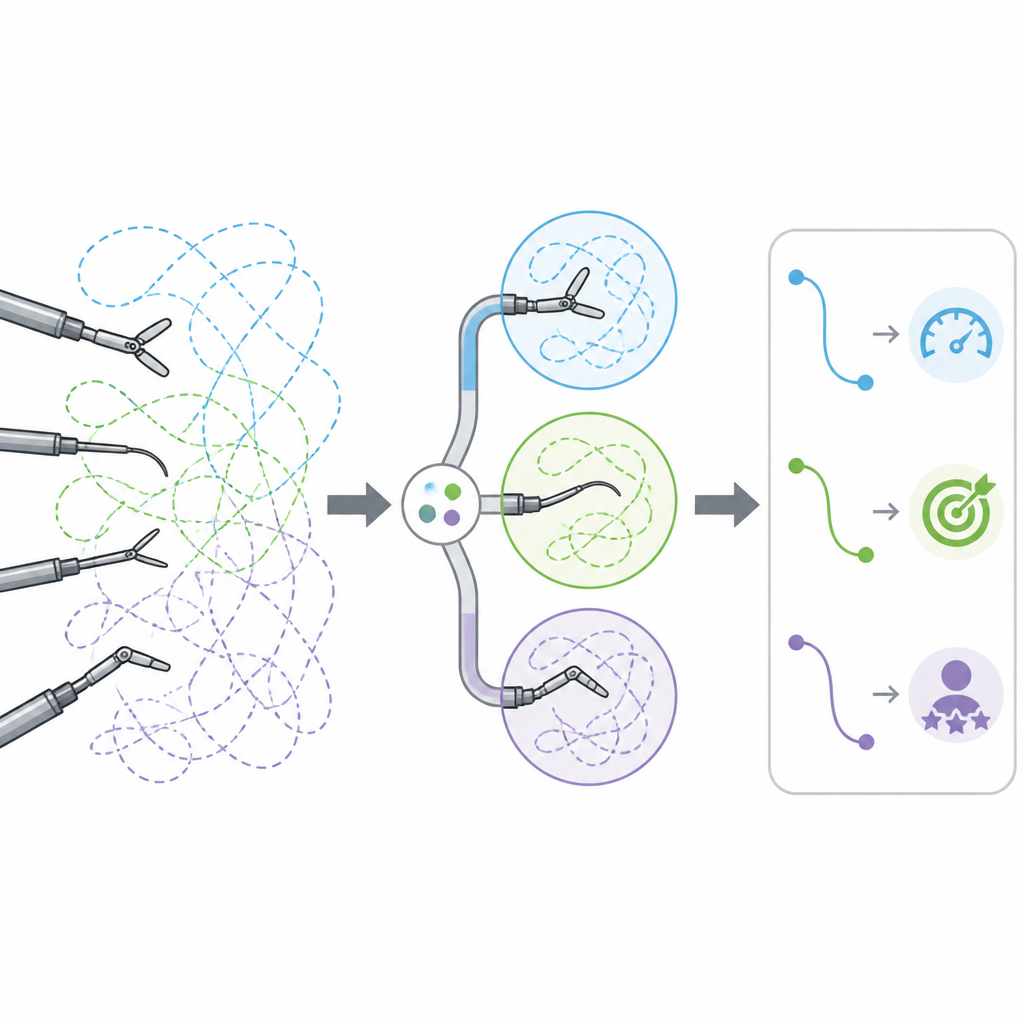
研究团队通过提出一个简单问题来应对这一问题:与其按哪只手拿着器械来标注,不如按器械在每一时刻承担的工作将它们分组?他们建立了一个语义“分类法”,在任务期间将每个机器人器械分配到三种角色之一。被动牵开器主要用来撑开组织以便不妨碍视野。主动牵开器帮助暴露手术视野并支持主要动作。主导器械完成关键工作,如切割、夹合或缝合。算法利用每件工具的运动模式,并在某些任务中结合器械类型,自动为器械标注这些角色,然后将原始运动指标重组为更少的、基于功能的集合。
把混乱的运动变成更清晰的信号
团队将这种基于角色的系统应用于462例机器人手术的数据:胆囊切除术、腹股沟疝修补术和袖状胃切除术。在原始设置中,每例手术可能有超过300个运动指标,其中许多为空值,因为并非每件器械在每项任务中都会出现。采用新分类法后,这一数量缩减到刚刚超过60个基于角色的指标,且几乎所有指标都包含可用值。当他们将算法的标注与人工审查对照时,二者通常高度一致,尤其是在动作定义明确的任务中,表明运动模式大多携带足够信息以识别每件器械的功能。
用更少线索预测速度与经验
真正的考验在于,这种精简、以角色为中心的数据视角能否在预测任务进展上匹配或超越原有的庞大指标集。研究者使用统计模型提出两个问题:任务是否比预期运行更久?主刀医生是有经验的主治医师还是受训的住院医师?基于分类法的指标构建的模型达到最佳表现所需的特征约少了三分之一,相比使用传统指标的模型,它们在预测上同时略微更准确且更均衡,这表明关注每件器械预期的功能可以增强隐藏在运动数据中的信号。
这对外科医生和病人意味着什么
通过为每件器械赋予清晰的功能角色并剔除空值或冗余测量,这一分类法将复杂的机器人数据转化为更清晰的手术实施图景。这可以帮助教育者精准判断学员是需要稳固辅助之手还是改进主要切割动作,并为未来监测技术并将其与病人结局关联的工具奠定更可靠的基础。尽管该方法仍需在更多医院和更多类型手术中验证,但它为利用机器人数据不仅衡量运动、而且理解与改进外科技艺提供了切实可行的路径。
引用: Ballo, M., Tindal, E.W., Nussbaum, J. et al. Semantic taxonomy-driven instrument classification streamlines kinematic analysis of objective performance indicators in robotic surgery. npj Digit. Surg. 1, 6 (2026). https://doi.org/10.1038/s44484-025-00005-z
关键词: 机器人手术, 手术技能评估, 性能指标, 机器学习, 医学培训