Clear Sky Science · ja
意味論的分類に基づく器具分類がロボット手術における客観的パフォーマンス指標の運動学解析を効率化する
なぜ手術室でより賢いロボットデータが重要なのか
ロボット手術は現在、医師が小さな切開で多くの一般的な手技を行うのを助け、その過程でロボットアームの動きとして膨大な運動データを生み出します。本研究は、そのデータを各器具が実際に何をしているかに沿って再編成することで、外科技能の評価、教育の指導、そして最終的には患者の安全な手術につながる判断がはるかに容易になることを示しています。
感覚に頼る評価からデータ駆動の技能チェックへ
長年にわたり外科医の技術は主に他者の観察と採点によって判断されてきました。こうした人間による評価は有益ですが時間がかかり、評価者によってばらつきがあり、即時のフィードバックをほとんど提供しません。現代のロボットは器具のあらゆるひねりや回転、映像やシステムイベントを記録します。これらの計測値(パフォーマンス指標と呼ばれる)は、既に初心者と熟練者を区別したり、術者の手の動きと術後の患者状態を関連付けたりするのに役立っています。しかし問題は、現在では百を超える異なる指標があり、多くは解釈が難しくほとんど使われていない点です。

各器具に明確な職務名を与える
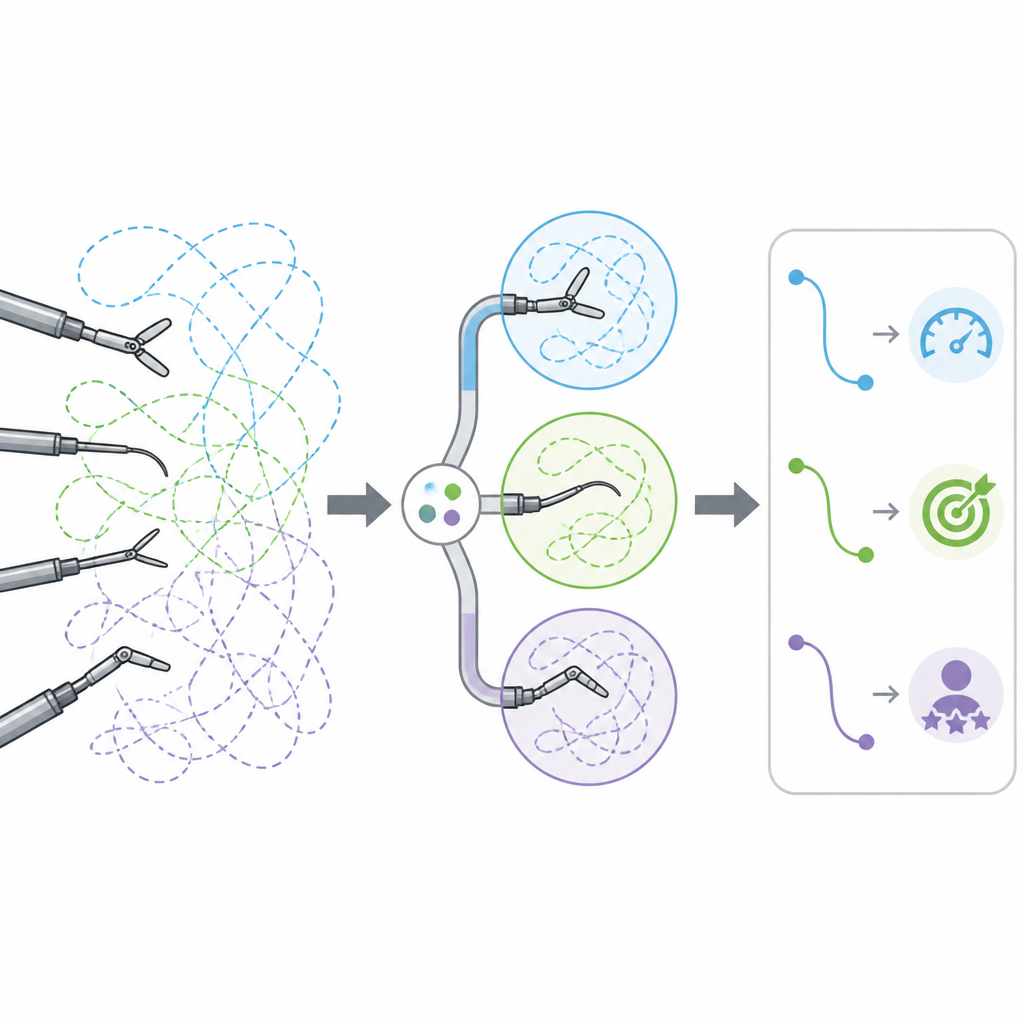
研究チームはこの問題に対してシンプルな問いを立てました。器具をどの手が持っているかでラベル付けする代わりに、その瞬間に器具が果たす仕事でグループ化したらどうなるか、というものです。彼らは各ロボット器具をタスク中に三つの役割のいずれかに割り当てる意味論的「分類体系」を構築しました。受動的リトラクターは主に組織を除けて保持します。能動的リトラクターは視野を露出させ、主要な動作を補助します。支配的な器具は切開、クリップ、縫合など主要な作業を行います。各器具の動作パターンと、特定のタスクでは使用器具の種類を用いて、アルゴリズムはこれらの役割で器具に自動的にタグを付け、生の運動指標をより小さく機能別のセットへと再編成します。
乱雑な動作をよりクリーンな信号へ変換する
チームはこの役割ベースのシステムを462件のロボット手術データ(胆嚢摘出術、鼠径ヘルニア修復、スリーブ胃切除術)に適用しました。元の設定では、症例ごとに300を超える可能な運動指標があり、すべての器具がすべてのタスクに登場するわけではないため多くが空になっていました。新しい分類体系ではそれが役割ベースで約60強の指標に縮小され、ほとんどすべてに実用的な値が含まれていました。アルゴリズムによるラベリングを注意深い人間のレビューと照合したところ、特に行動が明確に定義されているタスクでは一致度が概ね高く、動作パターンが各器具の役割を大半の時間で認識するのに十分な情報を含んでいることが示されました。
少ない手がかりで速度と経験を予測する
真の試験は、この簡潔で役割に焦点を当てたデータ観が、タスクの展開を予測する点で従来の膨大な指標集合に匹敵するか上回るかどうかでした。統計モデルを用いて研究者らは二つの問いを立てました:タスクは予想より長くかかったか、そして主要術者は経験豊かな常勤医か研修医か。分類体系に基づく指標で構築したモデルは、従来の指標を用いたモデルと比べて最良性能に到達するために必要な特徴量を概ね3分の1少なくできました。同時に、予測の精度とバランスはわずかに向上し、それぞれの器具が意図された役割に注目することで運動データに潜む信号が研ぎ澄まされることを示唆しています。
外科医と患者にとっての意味
すべての器具に明確な機能的役割を与え、空の値や冗長な計測を削ることで、この分類体系は複雑なロボットデータを手術が実際にどのように行われているかを示すより明確な図に変えます。これにより教育者は学習者が支援する手を安定させる必要があるのか、主要な切開動作を洗練する必要があるのかを特定しやすくなり、技術を監視しそれを患者アウトカムと結びつける将来のツールのより信頼できる基盤を築きます。アプローチはさらに多くの病院や手術種別で検証する必要がありますが、ロボットデータを単に運動を測るためだけでなく、外科技術を理解し改善するために活用する実用的な道筋を提供します。
引用: Ballo, M., Tindal, E.W., Nussbaum, J. et al. Semantic taxonomy-driven instrument classification streamlines kinematic analysis of objective performance indicators in robotic surgery. npj Digit. Surg. 1, 6 (2026). https://doi.org/10.1038/s44484-025-00005-z
キーワード: ロボット手術, 外科技能評価, パフォーマンス指標, 機械学習, 医療トレーニング