Clear Sky Science · ar
تصنيف الأدوات المدفوع بتصنيف دلالي يبسط تحليل الحركة لمؤشرات الأداء الموضوعية في الجراحة الروبوتية
لماذا تهم بيانات الروبوت الأذكى في غرفة العمليات
تساعد الجراحة الروبوتية الآن الأطباء على إجراء العديد من العمليات الشائعة عبر شقوق صغيرة، مما يولد سيلًا من بيانات الحركة مع تحرك أذرع الروبوت. توضح هذه الدراسة كيف أن إعادة تنظيم تلك البيانات حول ما تفعله كل أداة فعليًا يمكن أن يجعل من الأسهل بكثير الحكم على المهارة الجراحية، وتوجيه التدريب، وفي النهاية دعم عمليات أكثر أمانًا للمرضى.
من الحدس إلى فحوص المهارة المعتمدة على البيانات
لسنوات، كانت القدرة التقنية للجراح تُقَيَّم في المقام الأول بواسطة مشاهدين بشريين يقدمون تقييماً لأدائهم. هذه التقييمات البشرية مفيدة لكنها تستغرق وقتًا، وقد تختلف من مراجع لآخر، ونادرًا ما تقدم تغذية راجعة فورية. تسجل الروبوتات الحديثة كل التفاف وانعطاف للأدوات، إلى جانب الفيديو والأحداث النظامية. تساعد هذه القياسات، المسماة مؤشرات الأداء، بالفعل في التفريق بين الجراحين المبتدئين والخبراء وربط كيفية تحريكهم لأدواتهم بنتائج المرضى بعد الجراحة. المشكلة أن هناك الآن أكثر من مئة مؤشر مختلف، العديد منها يصعب تفسيره ونادرًا ما يُستخدم.

منح كل أداة لقب وظيفة واضح
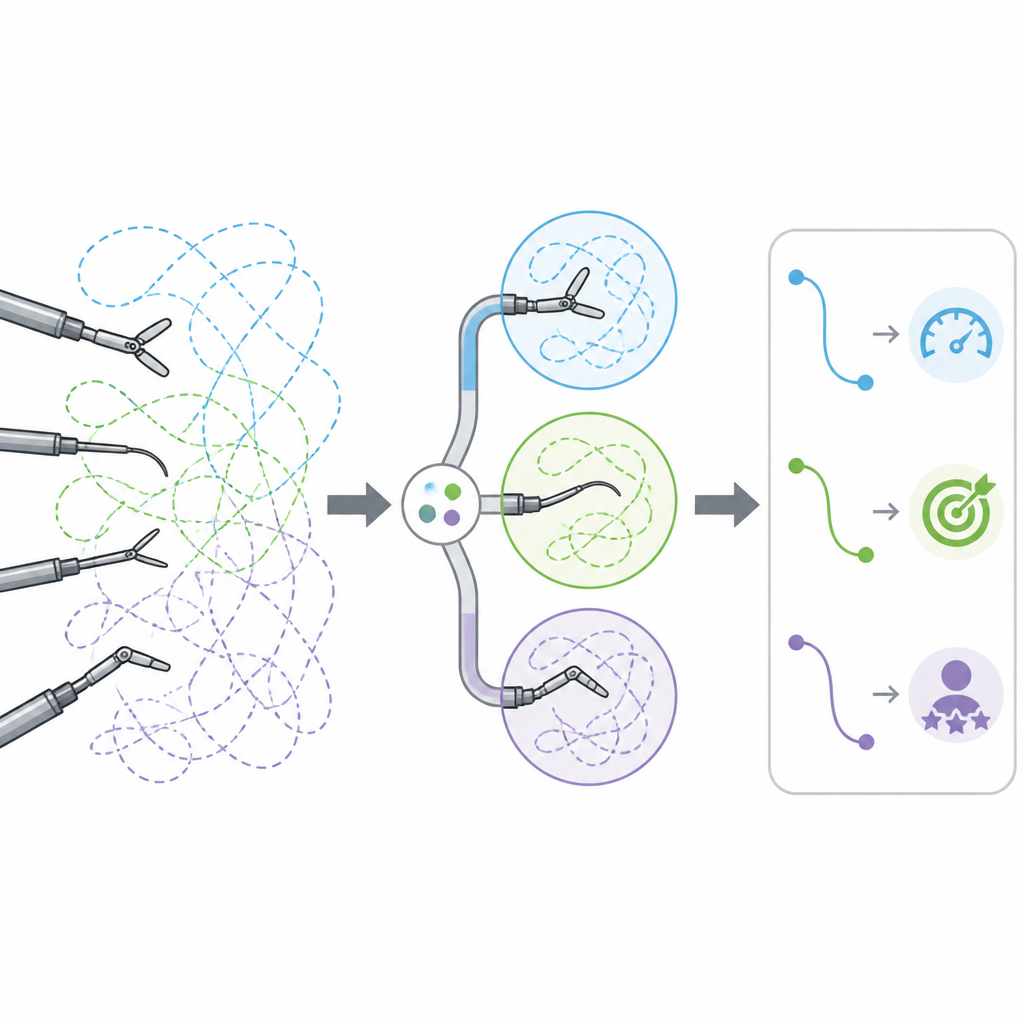
تعامل فريق البحث مع هذه المشكلة بطرح سؤال بسيط: بدلًا من وسم الأدوات بحسب اليد التي تمسكها، ماذا لو جمعناها بحسب الوظيفة التي تؤديها في كل لحظة؟ بنوا تصنيفًا دلاليًا يَعيّن كل أداة روبوتية إلى واحد من ثلاثة أدوار أثناء المهمة. الممسك الساكن (retractor passive) يمسك النسيج بعيدًا عن مجال العمل. الممسك النشط يساعد في كشف الحقل ويدعم الفعل الرئيسي. الأداة المسيطرة تقوم بالعمل الأساسي، مثل القطع أو الربط أو الخياطة. باستخدام أنماط حركة كل أداة، وللمهام المعينة نوع الأداة المستخدمة، يقوم الخوارزم تلقائيًا بوسم الأدوات بهذه الأدوار ثم يعيد تنظيم مؤشرات الحركة الخام إلى مجموعة أصغر مبنية على الوظيفة.
تحويل الحركة الفوضوية إلى إشارات أنظف
طبق الفريق هذا النظام القائم على الأدوار على بيانات من 462 عملية روبوتية: استئصال المرارة، إصلاح الفتق الإربي، وتكميم المعدة. في الإعداد الأصلي، كان هناك أكثر من 300 مؤشر حركة محتمل لكل حالة، كثير منها كان فارغًا لأن ليست كل أدوات تظهر في كل مهمة. مع التصنيف الجديد، تقلص ذلك إلى ما يزيد قليلاً عن 60 مؤشرًا قائمًا على الدور، وكانت تقريبًا جميعها تحتوي على قيم قابلة للاستخدام. عندما تحققوا من وسوم الخوارزم مقابل مراجعة بشرية دقيقة، كانت الاتفاقية عادةً عالية جدًا، خاصة في المهام ذات الإجراءات المحددة جيدًا، مما يُظهر أن أنماط الحركة حملت معلومات كافية للتعرف على ما كانت تفعله كل أداة في معظم الأوقات.
التنبؤ بالسرعة والخبرة بمفردات أقل
الاختبار الحقيقي كان ما إذا كانت هذه النظرة المقتضبة المركزة على الدور للبيانات قادرة على المطابقة أو التفوق على المجموعة الأصلية المتفرعة في التنبؤ بكيفية سير المهمة. باستخدام نماذج إحصائية، طرح الباحثون سؤالين: هل استغرقت المهمة أطول من المتوقع؟ وهل كان الجراح الرئيسي حاضراً ذا خبرة أم متدرباً مقيمًا؟ احتاجت النماذج المبنية على مؤشرات التصنيف إلى نحو ثلث الميزات أقل للوصول إلى أفضل أداء مقارنة بالنماذج التي استخدمت المؤشرات التقليدية. في الوقت نفسه، كانت أكثر دقة وتوازناً قليلًا في تنبؤاتها، مما يوحي أن التركيز على ما يُفترض أن تفعله كل أداة يمكن أن يوضح الإشارة الخفية في بيانات الحركة.
ماذا يعني هذا للجراحين والمرضى
من خلال منح كل أداة دورًا وظيفيًا واضحًا وقصر القياسات الفارغة أو المكررة، يحول هذا التصنيف بيانات الروبوت المعقدة إلى صورة أوضح عن كيفية إجراء الجراحة فعليًا. يمكن أن يساعد ذلك المدربين على تحديد ما إذا كان المتعلّم بحاجة إلى تثبيت اليد الداعمة أو تحسين حركة القطع الرئيسية، ويُؤَسِّس قاعدة أكثر موثوقية لأدوات مستقبلية تراقب التقنية وتربطها بنتائج المرضى. وبينما يحتاج النهج إلى اختبارات في مزيد من المستشفيات وأنواع العمليات، فإنه يقدم مسارًا عمليًا نحو استخدام بيانات الروبوت ليس فقط لقياس الحركة، بل لفهم وتحسين مهنة الجراحة.
الاستشهاد: Ballo, M., Tindal, E.W., Nussbaum, J. et al. Semantic taxonomy-driven instrument classification streamlines kinematic analysis of objective performance indicators in robotic surgery. npj Digit. Surg. 1, 6 (2026). https://doi.org/10.1038/s44484-025-00005-z
الكلمات المفتاحية: الجراحة الروبوتية, تقييم المهارة الجراحية, مؤشرات الأداء, التعلم الآلي, التدريب الطبي