Clear Sky Science · fr
La classification des instruments basée sur une taxonomie sémantique simplifie l’analyse cinématique des indicateurs objectifs de performance en chirurgie robotique
Pourquoi des données robotisées plus intelligentes comptent au bloc opératoire
La chirurgie robotique aide aujourd’hui les médecins à réaliser de nombreuses opérations courantes par de petites incisions, générant un flot de données de mouvement au fur et à mesure que les bras du robot se déplacent. Cette étude montre que réorganiser ces données autour de ce que chaque outil fait réellement peut grandement faciliter le jugement des compétences chirurgicales, guider la formation et, en fin de compte, soutenir des interventions plus sûres pour les patients.
Passer de l’intuition à des contrôles de compétence basés sur les données
Pendant des années, la compétence technique d’un chirurgien était jugée principalement par des observateurs humains qui notaient sa performance. Ces évaluations sont utiles mais prennent du temps, peuvent varier d’un évaluateur à l’autre et offrent rarement un retour instantané. Les robots modernes enregistrent chaque mouvement des instruments, ainsi que la vidéo et les événements système. Ces mesures, appelées indicateurs de performance, aident déjà à distinguer les novices des experts et relient la façon dont ils bougent leurs mains aux résultats des patients après l’opération. Le problème est qu’il existe désormais plus d’une centaine d’indicateurs différents, dont beaucoup sont difficiles à interpréter et rarement utilisés.

Attribuer à chaque instrument un intitulé de poste clair
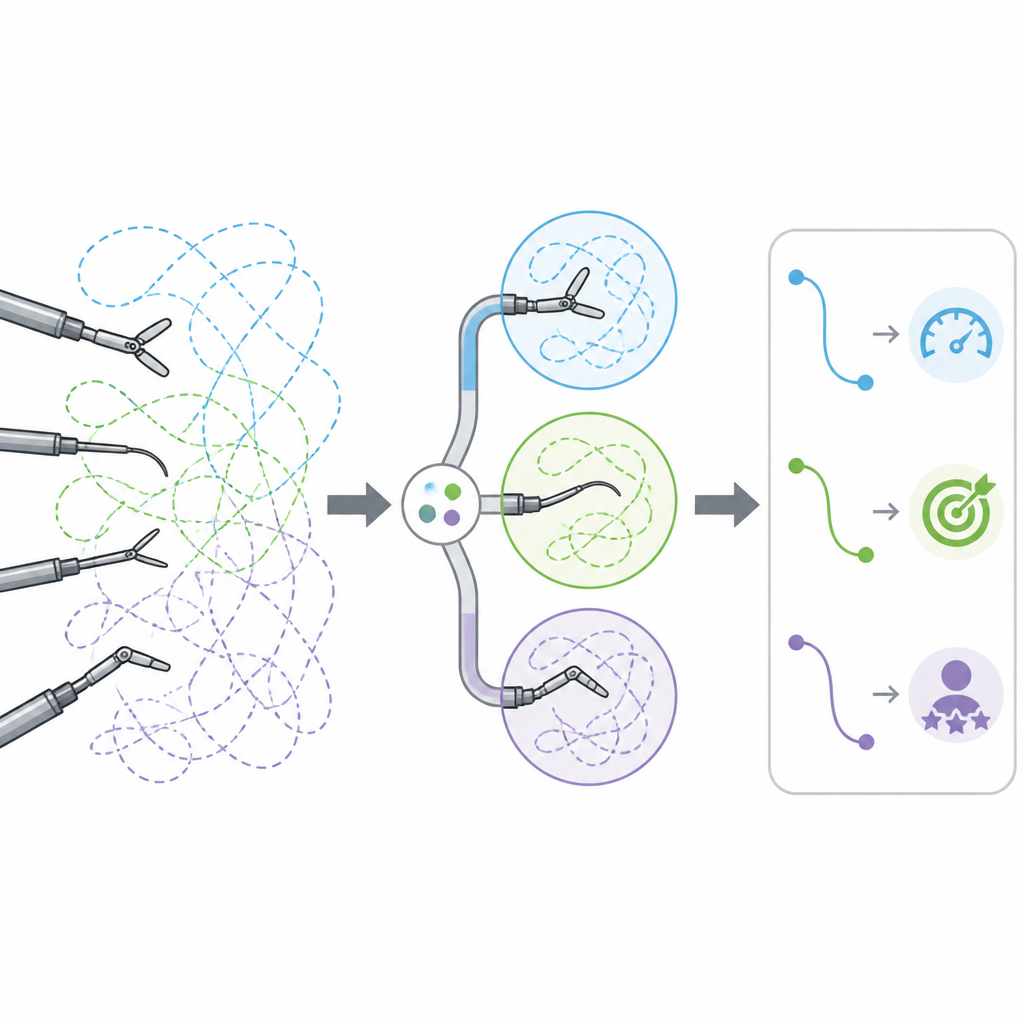
L’équipe de recherche a abordé ce problème en posant une question simple : au lieu d’étiqueter les instruments selon la main qui les tient, et si on les groupe par le rôle qu’ils jouent à chaque instant ? Ils ont construit une « taxonomie » sémantique qui assigne chaque instrument robotique à l’un des trois rôles pendant une tâche. Un rétracteur passif maintient principalement les tissus à distance. Un rétracteur actif aide à exposer le champ opératoire et soutient l’action principale. L’instrument dominant réalise le travail clé, comme couper, clipser ou suturer. En s’appuyant sur les motifs de mouvement de chaque outil et, pour certaines tâches, sur le type d’instrument utilisé, l’algorithme étiquette automatiquement les outils avec ces rôles puis réorganise les indicateurs bruts de mouvement en un ensemble réduit basé sur la fonction.
Transformer des mouvements désordonnés en signaux plus propres
L’équipe a appliqué ce système basé sur les rôles aux données de 462 interventions robotiques : cholécystectomie, réparation de hernie inguinale et sleeve gastrectomie. Dans la configuration d’origine, il y avait plus de 300 indicateurs possibles par cas, dont beaucoup étaient vides car tous les instruments n’apparaissent pas dans chaque tâche. Avec la nouvelle taxonomie, ce nombre est tombé à un peu plus de 60 indicateurs basés sur le rôle, et presque tous contenaient des valeurs exploitables. Lorsqu’ils ont comparé l’étiquetage de l’algorithme à une revue humaine minutieuse, l’accord était généralement très élevé, surtout dans les tâches aux actions bien définies, montrant que les motifs de mouvement portaient suffisamment d’information pour reconnaître ce que faisait chaque outil la plupart du temps.
Prédire la rapidité et l’expérience avec moins d’indices
Le véritable test était de savoir si cette vue épurée et axée sur les rôles des données pouvait égaler ou surpasser l’ensemble original et volumineux pour prédire le déroulement des tâches. À l’aide de modèles statistiques, les chercheurs ont posé deux questions : la tâche a-t-elle duré plus longtemps que prévu, et le chirurgien principal était-il un praticien expérimenté ou un résident en formation ? Les modèles construits sur les indicateurs basés sur la taxonomie ont nécessité environ un tiers de variables en moins pour atteindre leur performance maximale que les modèles utilisant les indicateurs conventionnels. Parallèlement, ils étaient légèrement plus précis et mieux équilibrés dans leurs prédictions, ce qui suggère que se concentrer sur ce que chaque outil est censé faire peut affiner le signal caché dans les données de mouvement.
Ce que cela signifie pour les chirurgiens et les patients
En donnant à chaque instrument un rôle fonctionnel clair et en éliminant les mesures vides ou redondantes, cette taxonomie transforme des données robotiques complexes en une image plus nette de la manière dont la chirurgie est réellement effectuée. Cela peut aider les formateurs à identifier si un apprenant doit stabiliser une main de soutien ou affiner le mouvement de coupe principal, et cela pose une base plus fiable pour de futurs outils qui surveillent la technique et la relient aux résultats patients. Bien que l’approche doive encore être testée dans davantage d’hôpitaux et de types d’interventions, elle offre une voie pratique pour utiliser les données robotisées non seulement pour mesurer le mouvement, mais pour comprendre et améliorer l’art de la chirurgie.
Citation: Ballo, M., Tindal, E.W., Nussbaum, J. et al. Semantic taxonomy-driven instrument classification streamlines kinematic analysis of objective performance indicators in robotic surgery. npj Digit. Surg. 1, 6 (2026). https://doi.org/10.1038/s44484-025-00005-z
Mots-clés: chirurgie robotique, évaluation des compétences chirurgicales, indicateurs de performance, apprentissage automatique, formation médicale