Clear Sky Science · es
La clasificación de instrumentos guiada por una taxonomía semántica agiliza el análisis cinemático de indicadores objetivos de rendimiento en cirugía robótica
Por qué importan datos robóticos más inteligentes en el quirófano
La cirugía robótica ayuda hoy a los médicos a realizar muchas operaciones comunes mediante incisiones mínimas, generando una avalancha de datos de movimiento conforme se mueven los brazos robotizados. Este estudio muestra cómo reorganizar esos datos en torno a lo que cada herramienta está realmente haciendo puede facilitar enormemente juzgar la habilidad quirúrgica, guiar la formación y, en última instancia, apoyar operaciones más seguras para los pacientes.
Del instinto a las comprobaciones de habilidad basadas en datos
Durante años, la habilidad técnica de un cirujano se juzgó principalmente por otras personas que observaban y puntuaban su desempeño. Estas valoraciones humanas son útiles pero consumen tiempo, pueden variar entre evaluadores y rara vez ofrecen retroalimentación inmediata. Los robots modernos registran cada giro y movimiento de los instrumentos, junto con video y eventos del sistema. Estas mediciones, llamadas indicadores de rendimiento, ya ayudan a separar a los cirujanos novatos de los expertos y relacionan cómo mueven las manos con los resultados de los pacientes tras la cirugía. El problema es que ahora existen más de cien indicadores diferentes, muchos de difícil interpretación y que rara vez se usan.

Dar a cada herramienta un título de trabajo claro
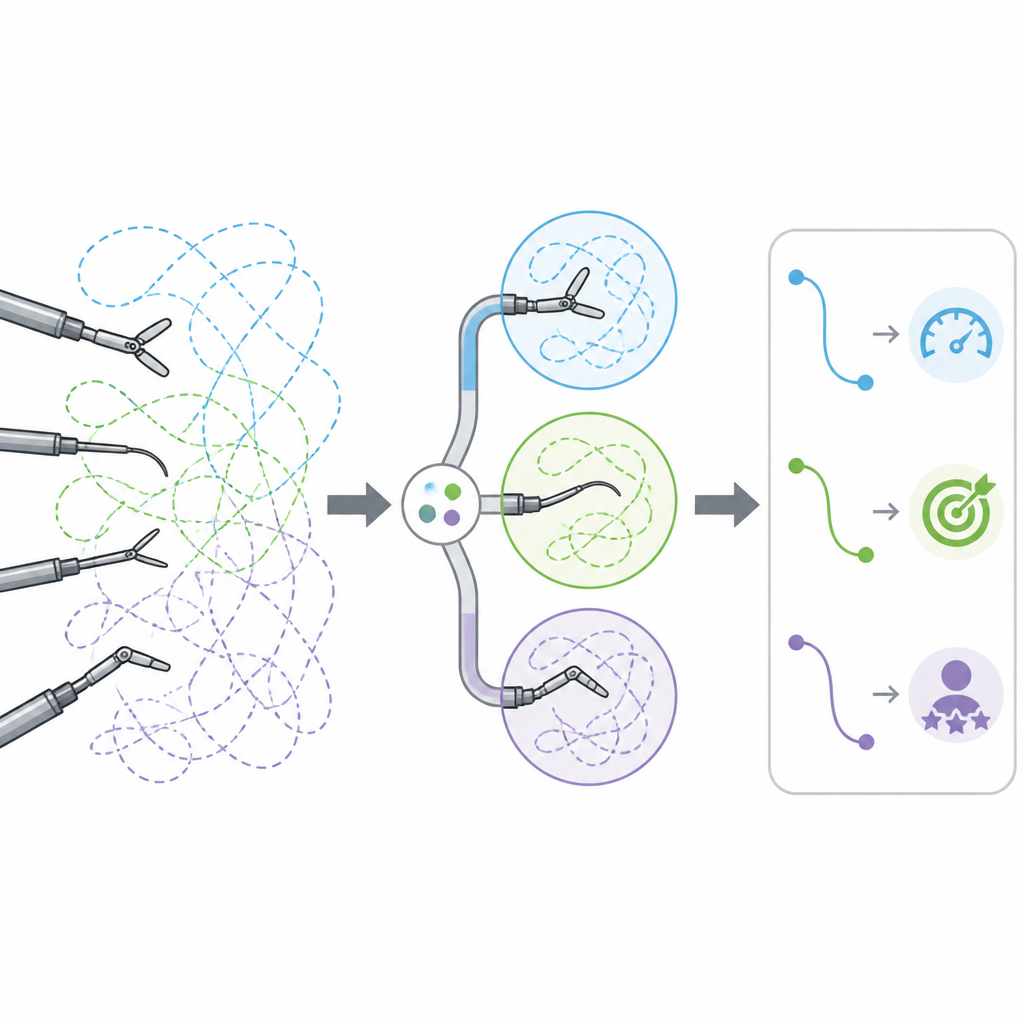
El equipo de investigación abordó este problema planteando una pregunta simple: en lugar de etiquetar los instrumentos según la mano que los sostiene, ¿y si los agrupamos por la tarea que realizan en cada momento? Construyeron una “taxonomía” semántica que asigna a cada instrumento robótico uno de tres roles durante una tarea. Un retractador pasivo sostiene principalmente el tejido fuera del campo. Un retractador activo ayuda a exponer el campo y apoya la acción principal. El instrumento dominante realiza el trabajo clave, como cortar, colocar grapas o suturar. Usando los patrones de movimiento de cada herramienta y, para ciertas tareas, el tipo de instrumento empleado, el algoritmo etiqueta automáticamente los instrumentos con estos roles y luego reorganiza los indicadores de movimiento crudos en un conjunto más pequeño y basado en la función.
Convertir movimiento desordenado en señales más limpias
El equipo aplicó este sistema basado en roles a datos de 462 operaciones robóticas: colecistectomía, reparación de hernia inguinal y gastrectomía en manga. En la configuración original había más de 300 indicadores de movimiento posibles por caso, muchos vacíos porque no todos los instrumentos aparecen en cada tarea. Con la nueva taxonomía, eso se redujo a poco más de 60 indicadores basados en roles, y casi todos ellos contenían valores utilizables. Cuando comprobaron el etiquetado del algoritmo frente a una revisión humana cuidadosa, el acuerdo fue habitualmente muy alto, especialmente en tareas con acciones bien definidas, lo que demuestra que los patrones de movimiento llevaban suficiente información para reconocer lo que cada herramienta estaba haciendo la mayor parte del tiempo.
Predecir velocidad y experiencia con menos pistas
La prueba real fue si esta visión depurada y centrada en roles de los datos podía igualar o superar al conjunto original para predecir cómo se desarrollaban las tareas. Usando modelos estadísticos, los investigadores plantearon dos preguntas: ¿la tarea duró más de lo esperado? y ¿el cirujano principal era un especialista experimentado o un residente en formación? Los modelos construidos con indicadores basados en la taxonomía necesitaron aproximadamente un tercio menos de características para alcanzar su mejor rendimiento que los modelos que usaban indicadores convencionales. Al mismo tiempo, fueron ligeramente más precisos y equilibrados en sus predicciones, lo que sugiere que centrarse en lo que se espera que haga cada herramienta puede afinar la señal oculta en los datos de movimiento.
Qué significa esto para cirujanos y pacientes
Al asignar a cada instrumento un rol funcional claro y eliminar mediciones vacías o redundantes, esta taxonomía convierte los complejos datos robóticos en una imagen más nítida de cómo se realiza la cirugía. Esto puede ayudar a los educadores a identificar si un aprendiz necesita estabilizar una mano de apoyo o perfeccionar el movimiento principal de corte, y sienta una base más confiable para futuras herramientas que supervisen la técnica y la relacionen con los resultados en pacientes. Aunque el enfoque aún debe probarse en más hospitales y tipos de operaciones, ofrece un camino práctico para usar los datos robóticos no solo para medir el movimiento, sino para entender y mejorar el oficio de la cirugía.
Cita: Ballo, M., Tindal, E.W., Nussbaum, J. et al. Semantic taxonomy-driven instrument classification streamlines kinematic analysis of objective performance indicators in robotic surgery. npj Digit. Surg. 1, 6 (2026). https://doi.org/10.1038/s44484-025-00005-z
Palabras clave: cirugía robótica, evaluación de habilidades quirúrgicas, métricas de rendimiento, aprendizaje automático, formación médica