Clear Sky Science · en
Semantic taxonomy-driven instrument classification streamlines kinematic analysis of objective performance indicators in robotic surgery
Why smarter robot data matters in the operating room
Robotic surgery now helps doctors perform many common operations through tiny incisions, generating a flood of motion data as the robot arms move. This study shows how reorganizing that data around what each tool is actually doing can make it far easier to judge surgical skill, guide training, and ultimately support safer operations for patients.
From gut feeling to data driven skill checks
For years, a surgeon’s technical ability was judged mainly by other people watching and scoring their performance. These human ratings are useful but time consuming, can vary from one reviewer to another, and rarely offer instant feedback. Modern robots record every twist and turn of the instruments, along with video and system events. These measurements, called performance indicators, already help separate novice from expert surgeons and relate how they move their hands to how patients do after surgery. The catch is that there are now more than a hundred different indicators, many of which are hard to interpret and rarely used.

Giving each tool a clear job title
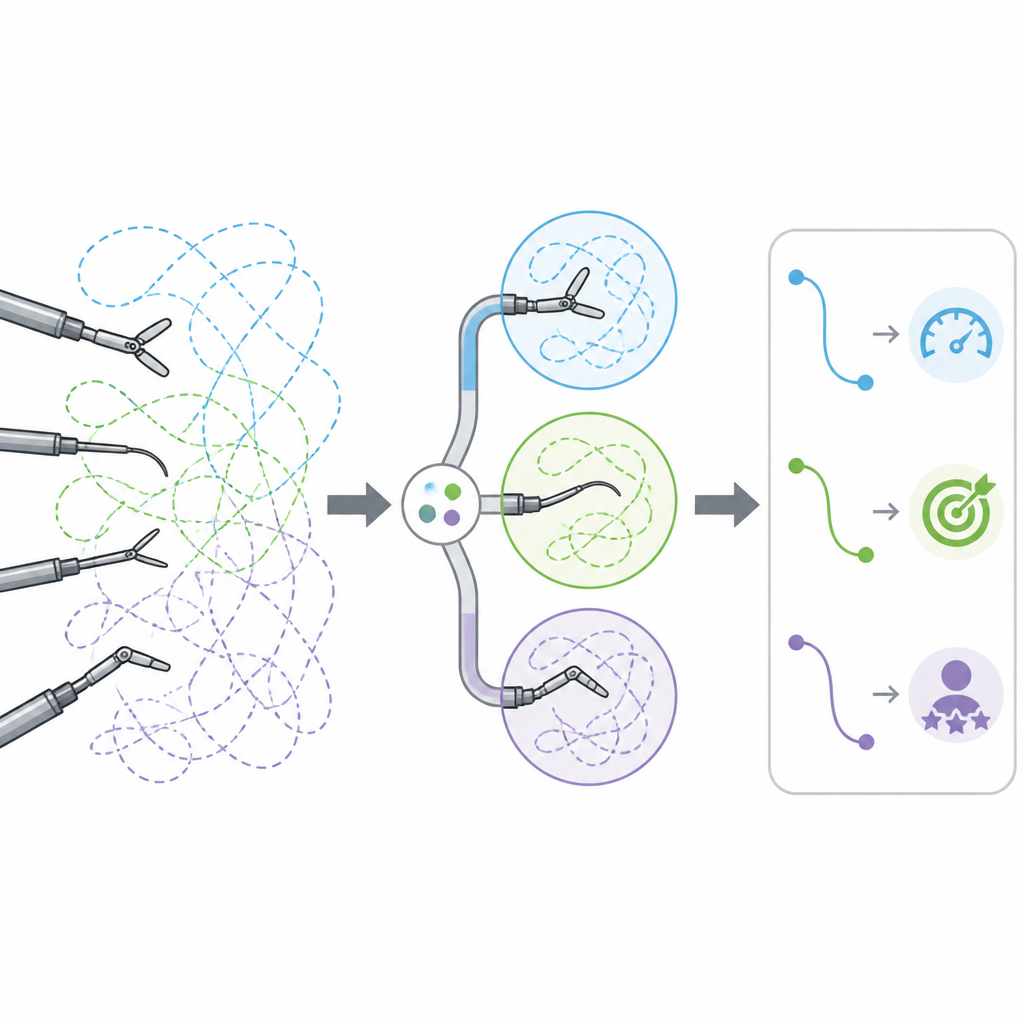
The research team tackled this problem by asking a simple question: instead of labeling instruments by which hand holds them, what if we group them by the job they perform in each moment? They built a semantic “taxonomy” that assigns every robotic instrument to one of three roles during a task. A passive retractor mainly holds tissue out of the way. An active retractor helps expose the field and supports the main action. The dominant instrument does the key work, such as cutting, clipping, or suturing. Using the motion patterns of each tool and, for certain tasks, the type of instrument in use, the algorithm automatically tags the tools with these roles and then reorganizes the raw motion indicators into a smaller, function based set.
Turning messy motion into cleaner signals
The team applied this role based system to data from 462 robotic operations: gallbladder removal, inguinal hernia repair, and sleeve gastrectomy. In the original setup, there were more than 300 possible motion indicators per case, many of which were empty because not every instrument appears in every task. With the new taxonomy, that shrank to just over 60 role based indicators, and almost all of them contained usable values. When they checked the algorithm’s labeling against careful human review, agreement was usually very high, especially in tasks with well defined actions, showing that the motion patterns carried enough information to recognize what each tool was doing most of the time.
Predicting speed and experience with fewer clues
The real test was whether this lean, role focused view of the data could match or beat the sprawling original set for predicting how tasks unfolded. Using statistical models, the researchers asked two questions: did a task run longer than expected, and was the main surgeon an experienced attending or a trainee resident? Models built on taxonomy based indicators needed roughly one third fewer features to reach their best performance than models using conventional indicators. At the same time, they were slightly more accurate and balanced in their predictions, suggesting that focusing on what each tool is meant to do can sharpen the signal hidden in the motion data.
What this means for surgeons and patients
By giving every instrument a clear functional role and trimming away empty or redundant measurements, this taxonomy turns complex robot data into a clearer picture of how surgery is actually performed. This can help educators pinpoint whether a learner needs to steady a supporting hand or refine the main cutting motion, and it lays a more trustworthy foundation for future tools that monitor technique and relate it to patient outcomes. While the approach still needs to be tested in more hospitals and types of operations, it offers a practical path toward using robot data not just to measure motion, but to understand and improve the craft of surgery.
Citation: Ballo, M., Tindal, E.W., Nussbaum, J. et al. Semantic taxonomy-driven instrument classification streamlines kinematic analysis of objective performance indicators in robotic surgery. npj Digit. Surg. 1, 6 (2026). https://doi.org/10.1038/s44484-025-00005-z
Keywords: robotic surgery, surgical skill assessment, performance metrics, machine learning, medical training