Clear Sky Science · pl
Semantyczna taksonomia klasyfikacji narzędzi upraszcza analizę kinematyczną obiektywnych wskaźników wydajności w chirurgii robotycznej
Dlaczego inteligentniejsze dane z robotów mają znaczenie na sali operacyjnej
Chirurgia robotyczna pomaga dziś lekarzom wykonać wiele powszechnych zabiegów przez niewielkie nacięcia, generując potok danych ruchowych w miarę poruszania się ramion robota. W tym badaniu pokazano, że reorganizacja tych danych wokół tego, co każde narzędzie rzeczywiście robi, może znacznie ułatwić ocenę umiejętności chirurgicznych, ukierunkować szkolenie i w efekcie wspierać bezpieczniejsze operacje dla pacjentów.
Od intuicji do kontroli umiejętności opartej na danych
Przez lata zdolności techniczne chirurga oceniano głównie na podstawie obserwacji i punktacji dokonywanej przez innych ludzi. Te oceny są przydatne, ale czasochłonne, mogą się różnić w zależności od recenzenta i rzadko dają natychmiastową informację zwrotną. Nowoczesne roboty rejestrują każdy skręt i ruch instrumentów, wraz z wideo i zdarzeniami systemowymi. Te pomiary, zwane wskaźnikami wydajności, już pomagają odróżniać początkujących od ekspertów i wiążą sposób poruszania się rąk z wynikami pacjenta po operacji. Problem w tym, że istnieje obecnie ponad sto różnych wskaźników, z których wiele jest trudnych do interpretacji i rzadko używanych.

Nadanie każdemu narzędziu jasnego opisu roli
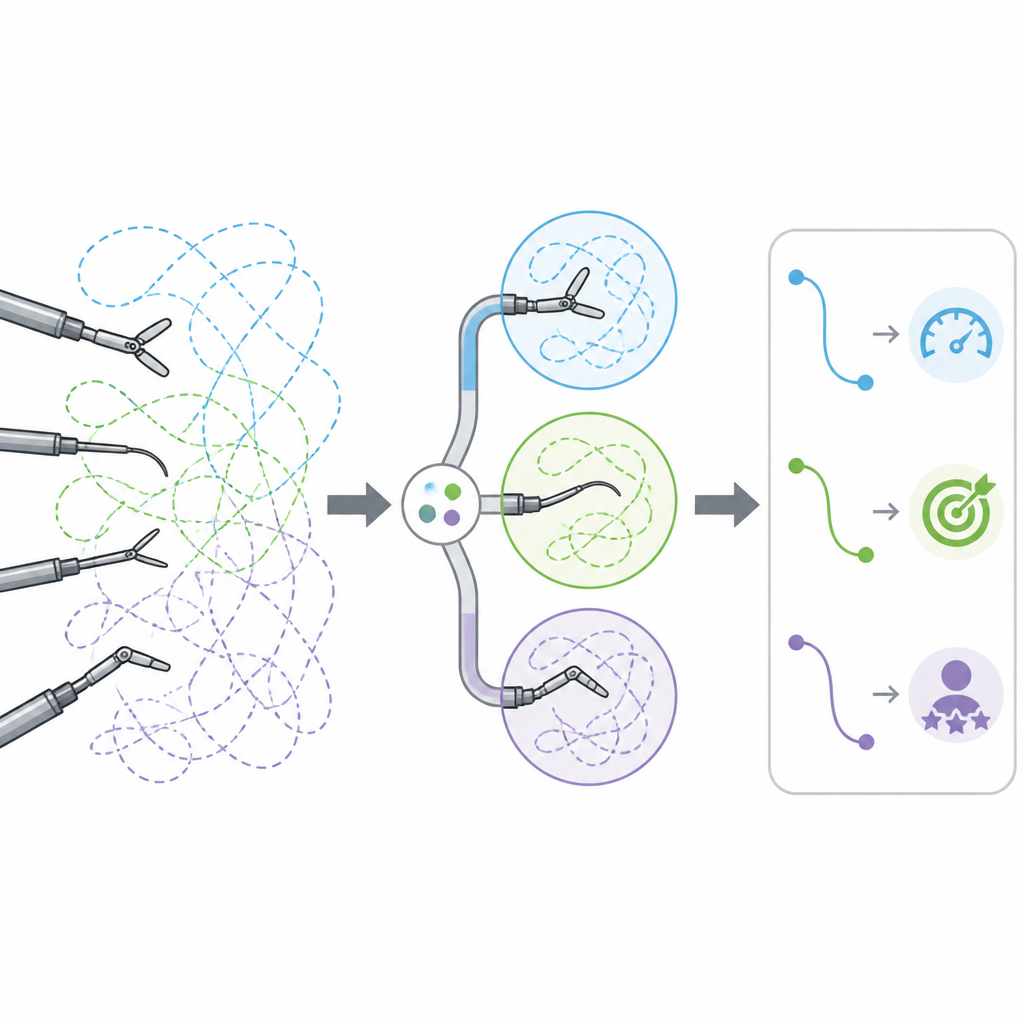
Zespół badawczy rozwiązał ten problem, zadając proste pytanie: zamiast oznaczać narzędzia według ręki, która je trzyma, co gdyby pogrupować je według zadania, które wykonują w danym momencie? Opracowali semantyczną „taksonomię”, która przypisuje każde narzędzie robotyczne do jednej z trzech ról podczas zadania. Retraktor pasywny głównie trzyma tkanki z dala. Retraktor aktywny pomaga eksponować pole i wspiera główną akcję. Instrument dominujący wykonuje kluczową pracę, taką jak cięcie, zakładanie klipsów czy szycie. Wykorzystując wzorce ruchu każdego narzędzia i, w niektórych zadaniach, typ używanego instrumentu, algorytm automatycznie oznacza narzędzia tymi rolami, a następnie reorganizuje surowe wskaźniki ruchu w mniejszy zestaw oparty na funkcji.
Przekształcanie chaotycznego ruchu w czystsze sygnały
Zespół zastosował ten system oparty na rolach do danych z 462 operacji robotycznych: usunięcia pęcherzyka żółciowego, naprawy przepukliny pachwinowej i rękawowej resekcji żołądka. W pierwotnym układzie było ponad 300 możliwych wskaźników ruchu na przypadek, z których wiele było pustych, ponieważ nie każde narzędzie pojawia się w każdym zadaniu. Dzięki nowej taksonomii liczba ta zmniejszyła się do nieco ponad 60 wskaźników opartych na rolach, a niemal wszystkie zawierały wartości użyteczne. Gdy porównano oznaczenia algorytmu z uważną oceną ludzką, zgodność była zazwyczaj bardzo wysoka, zwłaszcza w zadaniach o dobrze zdefiniowanych działaniach, co pokazuje, że wzorce ruchu niosły wystarczająco dużo informacji, by rozpoznać, co każde narzędzie robi przez większość czasu.
Przewidywanie czasu i doświadczenia przy użyciu mniejszej liczby wskazówek
Prawdziwym testem było sprawdzenie, czy to szczupłe, skoncentrowane na rolach spojrzenie na dane może dorównać lub przewyższyć rozległy oryginalny zestaw w przewidywaniu przebiegu zadań. Używając modeli statystycznych, badacze zadali dwa pytania: czy zadanie trwało dłużej niż oczekiwano oraz czy główny chirurg był doświadczonym konsultantem czy rezydentem w trakcie szkolenia. Modele zbudowane na wskaźnikach opartych na taksonomii potrzebowały około jednej trzeciej mniej cech, by osiągnąć najlepszą wydajność, niż modele używające konwencjonalnych wskaźników. Jednocześnie były nieco bardziej dokładne i zrównoważone w przewidywaniach, co sugeruje, że skupienie się na tym, co każde narzędzie ma robić, może wyostrzyć sygnał ukryty w danych ruchowych.
Co to oznacza dla chirurgów i pacjentów
Nadając każdemu instrumentowi jasną rolę funkcjonalną i eliminując puste lub zbędne pomiary, ta taksonomia przekształca złożone dane z robotów w czytelniejszy obraz tego, jak zabieg jest rzeczywiście wykonywany. Może to pomóc edukatorom precyzyjnie określić, czy uczący się powinien ustabilizować rękę wspierającą, czy udoskonalić główny ruch tnący, i stanowi bardziej wiarygodną podstawę dla przyszłych narzędzi monitorujących technikę i wiążących ją z wynikami pacjentów. Choć podejście wymaga jeszcze testów w większej liczbie szpitali i różnych typach operacji, oferuje praktyczną drogę do wykorzystania danych z robotów nie tylko do mierzenia ruchu, lecz także do zrozumienia i ulepszania rzemiosła chirurgii.
Cytowanie: Ballo, M., Tindal, E.W., Nussbaum, J. et al. Semantic taxonomy-driven instrument classification streamlines kinematic analysis of objective performance indicators in robotic surgery. npj Digit. Surg. 1, 6 (2026). https://doi.org/10.1038/s44484-025-00005-z
Słowa kluczowe: chirurgia robotyczna, ocena umiejętności chirurgicznych, metryki wydajności, uczenie maszynowe, szkolenie medyczne