Clear Sky Science · he
מיון מכשירים מונחה טאקסונומיה סמנטית מפשט ניתוח קינמטי של מדדי ביצוע אובייקטיביים בניתוח רובוטי
מדוע נתוני רובוט חכמים חשובים בחדר הניתוח
ניתוח רובוטי מסייע כיום לרופאים לבצע רבים מהפרוצדורות הנפוצות דרך חתכים זעירים, ויוצר שפע של נתוני תנועה בזמן תנועת זרועות הרובוט. המחקר מראה כיצד ארגון מחדש של אותם נתונים סביב מה שכל כלי עושה בפועל יכול להקל משמעותית על הערכת מיומנות כירורגית, להנחות הכשרה ולבסוף לתמוך בניתוחים בטוחים יותר עבור המטופלים.
מעיכוש בטן לאימות מיומנות מונחה נתונים
שנים רבות הוערכה היכולת הטכנית של מנתח בעיקר על ידי צופים אנושיים שנתנו ציונים לביצוע. דירוגים אנושיים אלה שימושיים אך גוזלים זמן, עשויים להשתנות בין מבקרים ולרוב אינם מספקים משוב מיידי. רובוטים מודרניים רושמים כל פיתול וסיבוב של הכלים, לצד וידאו ואירועי מערכת. מדידות אלה, הנקראות מדדי ביצוע, כבר מסייעות להפריד בין מנתחים מתחילים למנוסים ומקשרות את אופן תנועת הידיים לתוצאות המטופל לאחר הניתוח. הבעיה היא שכיום קיימים למעלה ממאה מדדי ביצוע שונים, רבים מהם קשים לפרש ולעיתים נדירות בשימוש.

לתת לכל כלי תפקיד ברור
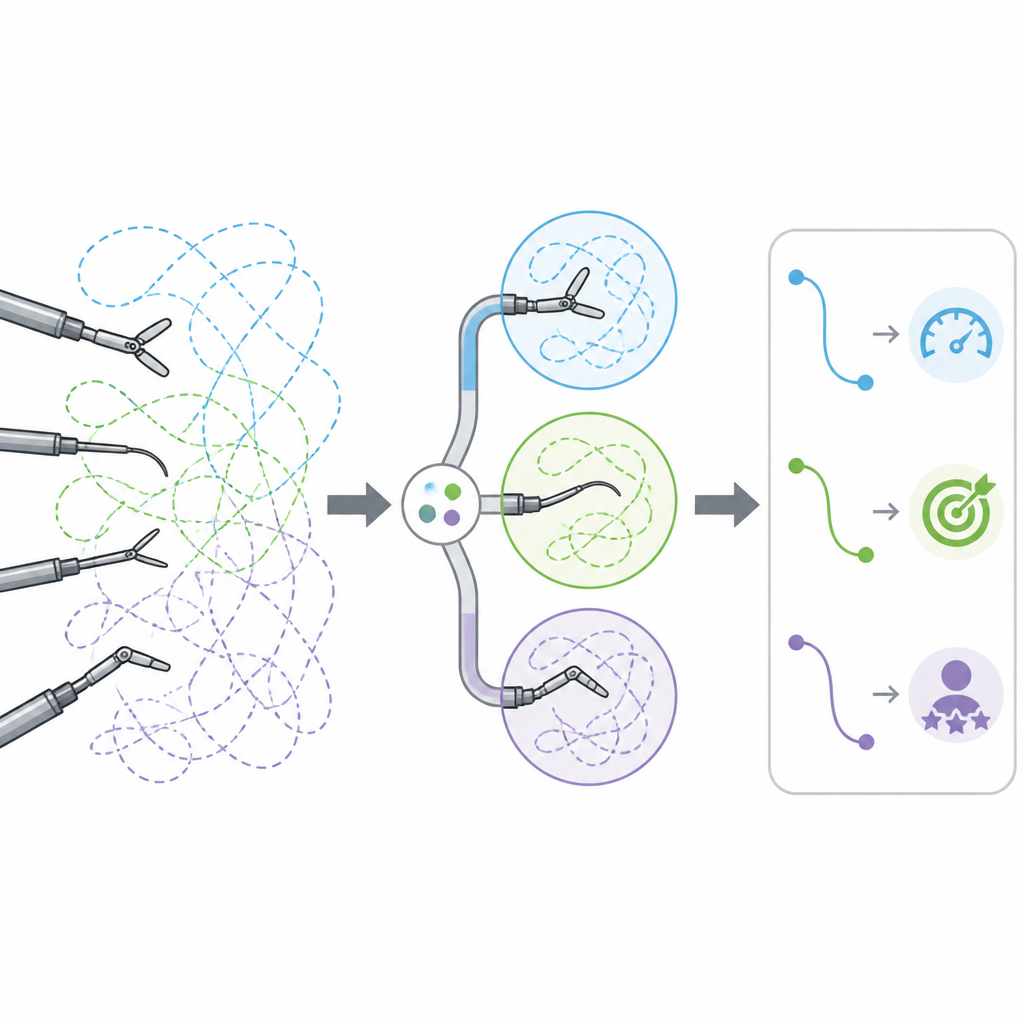
צוות המחקר פתר את הבעיה על ידי שאלה פשוטה: במקום לתייג כלים לפי איזו יד מחזיקה אותם, מה אם נארגן אותם לפי התפקיד שהם מבצעים בכל רגע נתון? הם בנו "טקסונומיה" סמנטית שממנת כל כלי רובוטי לאחד משלושה תפקידים במהלך המשימה. רטרקטור פסיבי מחזיק רק רקמה מחוץ לשדה. רטרקטור אקטיבי מסייע לחשוף את שדה העבודה ותומך בפעולה המרכזית. הכלי הדומיננטי מבצע את העבודה העיקרית, כגון חיתוך, קליפינג או תפירה. באמצעות תבניות התנועה של כל כלי, ולעתים גם לפי סוג הכלי המשמש במשימה מסוימת, האלגוריתם מתייג אוטומטית את הכלים לפי תפקידים אלה ואז מארגן מחדש את מדדי התנועה הגולמיים לסט מצומצם יותר המבוסס על פונקציה.
לשנות תנועה מבולגנת לאותות נקיים יותר
הצוות יישם את המערכת המבוססת תפקידים על נתונים מ-462 ניתוחים רובוטיים: כריתת כיס מרה, תיקון בקע מפשעתי וניתוח שרוול קיבה. בסידור המקורי היו יותר מ-300 מדדי תנועה אפשריים לכל מקרה, רבים מהם ריקים מכיוון שלא כל כלי מופיע בכל משימה. עם הטקסונומיה החדשה זה הצטמצם ל מעט מעל 60 מדדי תפקיד, וכמעט כולם הכילו ערכים לשימוש. כאשר השוו את תיוג האלגוריתם לסקירה אנושית מדוקדקת, ההסכמה הייתה בדרך כלל גבוהה מאוד, במיוחד במשימות עם פעולות מוגדרות היטב, מה שמראה שהתבניות התנועתיות הכילו מספיק מידע כדי לזהות מה כל כלי עושה ברוב הזמן.
חיזוי מהירות וניסיון בעזרת רמזים מועטים יותר
המבחן האמיתי היה האם הראייה המצומצמת והממוקדת בתפקידים של הנתונים יכולה להתחרות או להקדים את הסט המקורי הנרחב בחיזוי מהלך המשימות. באמצעות מודלים סטטיסטיים, החוקרים שאלו שתי שאלות: האם משימה ארכה יותר מהמצופה, והאם המנתח הראשי היה מרופא בכיר מנוסה או סטודנט/ת בהתמחות? מודלים שבנו על מדדי הטקסונומיה דרשו כשליש פחות תכונות כדי להגיע לביצועים מיטביים מאשר מודלים שהשתמשו במדדים המקובלים. יחד עם זאת, הם היו מעט מדויקים ומאוזנים יותר בתחזיותיהם, מה שמרמז כי התמקדות במה שכל כלי אמור לעשות יכולה לחדד את האות החבוי בנתוני התנועה.
מה המשמעות עבור מנתחים ומטופלים
על ידי הענקת תפקיד פונקציונלי ברור לכל כלי והסרת מדידות ריקות או מיותרות, הטקסונומיה הזו הופכת נתוני רובוט מורכבים לתמונה ברורה יותר של האופן שבו מתבצע הניתוח בפועל. זה יכול לעזור למדריכים לזהות האם הלומד צריך לייצב יד תומכת או לחדד את תנועת החיתוך המרכזית, והוא מציב בסיס אמין יותר לכלים עתידיים שמנטרים טכניקה ומקשרים אותה לתוצאות מטופל. על אף שהשיטה עדיין צריכה נבדקת בבתי חולים נוספים ובסוגי פרוצדורות אחרים, היא מציעה מסלול מעשי לשימוש בנתוני רובוט לא רק למדידת תנועה, אלא להבנה ושיפור מלאכת הניתוח.
ציטוט: Ballo, M., Tindal, E.W., Nussbaum, J. et al. Semantic taxonomy-driven instrument classification streamlines kinematic analysis of objective performance indicators in robotic surgery. npj Digit. Surg. 1, 6 (2026). https://doi.org/10.1038/s44484-025-00005-z
מילות מפתח: ניתוח רובוטי, הערכת מיומנות כירורגית, מדדי ביצוע, למידת מכונה, הכשרה רפואית