Clear Sky Science · de
Semantische, taxonomiebasierte Instrumentenklassifikation vereinfacht die kinematische Analyse objektiver Leistungsindikatoren in der robotergestützten Chirurgie
Warum intelligentere Roboterdaten im Operationssaal wichtig sind
Die robotergestützte Chirurgie unterstützt Ärztinnen und Ärzte heute bei vielen Routineeingriffen durch kleinste Schnitte und erzeugt dabei eine Flut an Bewegungsdaten, während die Roboterarme sich bewegen. Diese Studie zeigt, dass die Neuordnung dieser Daten entlang dessen, was jedes Werkzeug tatsächlich tut, die Beurteilung chirurgischer Fertigkeiten, die Anleitung von Ausbildung und letztlich die Sicherheit für Patientinnen und Patienten deutlich vereinfachen kann.
Vom Bauchgefühl zur datengetriebenen Leistungsprüfung
Jahrelang wurde die technische Fähigkeit eines Chirurgen hauptsächlich dadurch beurteilt, dass andere Personen seine Leistung beobachteten und bewerteten. Diese menschlichen Einschätzungen sind nützlich, aber zeitaufwendig, können von Gutachter zu Gutachter variieren und liefern selten sofortiges Feedback. Moderne Roboter zeichnen jede Drehung und Bewegung der Instrumente sowie Video- und Systemereignisse auf. Diese Messungen, sogenannte Leistungsindikatoren, helfen bereits dabei, Anfänger von Experten zu unterscheiden und die Handbewegungen mit dem postoperativen Verlauf zu verknüpfen. Das Problem: Es gibt jetzt mehr als hundert verschiedene Indikatoren, von denen viele schwer zu interpretieren sind und selten genutzt werden.

Jedes Instrument mit einem klaren Berufsbild
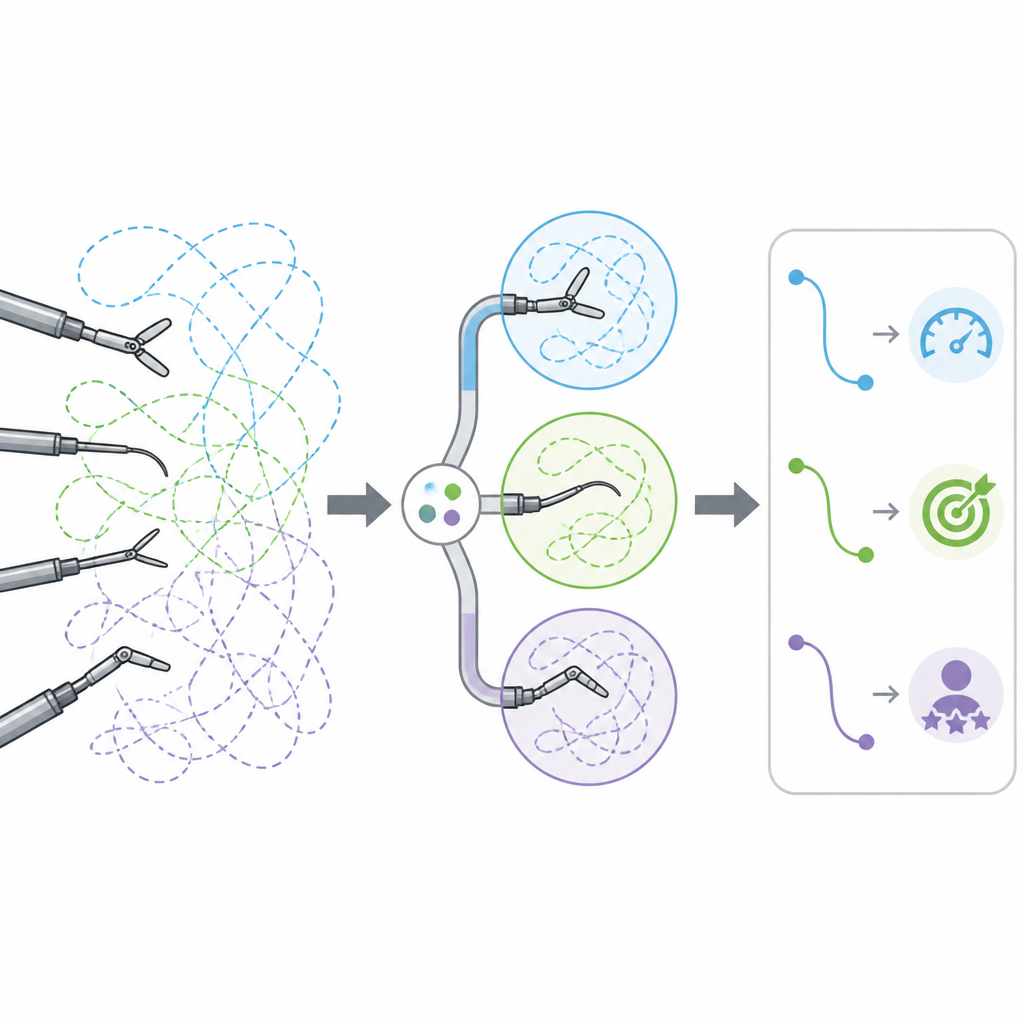
Das Forschungsteam ging dieses Problem mit einer einfachen Frage an: Statt Instrumente danach zu kennzeichnen, in welcher Hand sie gehalten werden, was wäre, wenn wir sie nach der Aufgabe gruppieren, die sie in jedem Moment erfüllen? Sie entwickelten eine semantische „Taxonomie“, die jedes Roboterinstrument während einer Aufgabe einer von drei Rollen zuweist. Ein passiver Retraktor hält hauptsächlich Gewebe aus dem Weg. Ein aktiver Retraktor hilft, das OP-Feld freizulegen und unterstützt die Hauptaktion. Das dominante Instrument verrichtet die Kernarbeit, etwa Schneiden, Klammern oder Nähen. Anhand der Bewegungsmuster jedes Werkzeugs und – bei bestimmten Aufgaben – des Instrumententyps versieht der Algorithmus die Werkzeuge automatisch mit diesen Rollen und reorganisiert die rohen Bewegungsindikatoren in einen kleineren, funktionsbasierten Satz.
Aus unübersichtlicher Bewegung werden klarere Signale
Das Team wandte dieses rollenbasierte System auf Daten aus 462 Robotereingriffen an: Gallenblasenentfernung, Leistenbruchreparatur und Schlauchmagen-Operation. In der ursprünglichen Konfiguration gab es mehr als 300 mögliche Bewegungsindikatoren pro Fall, viele davon leer, weil nicht jedes Instrument in jeder Aufgabe auftaucht. Mit der neuen Taxonomie schrumpfte das auf etwas über 60 rollenbasierte Indikatoren, und fast alle enthielten nutzbare Werte. Beim Abgleich der Algorithmus-Kennzeichnung mit sorgfältiger menschlicher Überprüfung war die Übereinstimmung meist sehr hoch, besonders bei Aufgaben mit klar definierten Aktionen, was zeigt, dass die Bewegungsmuster genug Informationen tragen, um in den meisten Fällen zu erkennen, was jedes Werkzeug gerade tut.
Geschwindigkeit und Erfahrung mit weniger Hinweisen vorhersagen
Der eigentliche Test war, ob diese schlanke, rollenfokussierte Sicht auf die Daten mit dem umfangreichen ursprünglichen Satz mithalten kann oder ihn übertrifft, wenn es darum geht, den Verlauf von Aufgaben vorherzusagen. Mithilfe statistischer Modelle stellten die Forschenden zwei Fragen: Dauerte eine Aufgabe länger als erwartet, und war der hauptoperierende Chirurg ein erfahrener Oberarzt oder ein ausbildender Assistenzarzt? Modelle, die auf taxonomiebasierten Indikatoren beruhten, benötigten ungefähr ein Drittel weniger Merkmale, um ihre beste Leistung zu erreichen, als Modelle mit konventionellen Indikatoren. Gleichzeitig waren sie leicht genauer und ausgewogener in ihren Vorhersagen, was nahelegt, dass die Konzentration darauf, was jedes Werkzeug leisten soll, das in den Bewegungsdaten verborgene Signal schärfen kann.
Was das für Chirurgen und Patienten bedeutet
Indem jedem Instrument eine klare funktionale Rolle zugewiesen und leere oder redundante Messwerte entfernt werden, verwandelt diese Taxonomie komplexe Roboterdaten in ein klareres Bild davon, wie eine Operation tatsächlich ausgeführt wird. Das kann Ausbildenden helfen, gezielt festzustellen, ob ein Lernender die unterstützende Hand stabilisieren oder die Hauptschnittbewegung verfeinern muss, und es schafft eine verlässlichere Grundlage für künftige Werkzeuge, die Technik überwachen und mit Patientenergebnissen verknüpfen. Auch wenn der Ansatz noch in mehr Krankenhäusern und bei weiteren Eingriffsarten erprobt werden muss, bietet er einen praktischen Weg, Roboterdaten nicht nur zur Messung von Bewegung, sondern zum Verstehen und Verbessern der chirurgischen Praxis zu nutzen.
Zitation: Ballo, M., Tindal, E.W., Nussbaum, J. et al. Semantic taxonomy-driven instrument classification streamlines kinematic analysis of objective performance indicators in robotic surgery. npj Digit. Surg. 1, 6 (2026). https://doi.org/10.1038/s44484-025-00005-z
Schlüsselwörter: robotergestützte Chirurgie, Bewertung chirurgischer Fertigkeiten, Leistungsmetriken, maschinelles Lernen, medizinische Ausbildung