Clear Sky Science · sv
Semantisk taxonomidriven instrumentklassificering effektiviserar kinematisk analys av objektiva prestationsindikatorer vid robotkirurgi
Varför smartare robotdata spelar roll i operationssalen
Robotkirurgi hjälper i dag läkare att utföra många vanliga ingrepp genom små snitt och genererar en ström av rörelsedata när robotarmarna rör sig. Denna studie visar hur man genom att omorganisera dessa data kring vad varje verktyg faktiskt gör kan göra det mycket enklare att bedöma kirurgisk skicklighet, styra utbildning och i förlängningen stödja säkrare operationer för patienter.
Från magkänsla till datadrivna färdighetskontroller
I åratal bedömdes en kirurgs tekniska förmåga huvudsakligen av andra människor som tittade på och poängsatte prestationen. Dessa mänskliga bedömningar är användbara men tidskrävande, kan skilja sig åt mellan granskare och ger sällan omedelbar återkoppling. Moderna robotar spelar in varje vridning och rörelse hos instrumenten, tillsammans med video och systemhändelser. Dessa mätvärden, kallade prestationsindikatorer, hjälper redan till att skilja nybörjare från experter och kopplar hur de rör sina händer till patientresultat efter operation. Problemet är att det nu finns mer än hundra olika indikatorer, många svåra att tolka och sällan använda.

Att ge varje verktyg en tydlig arbetsbeskrivning
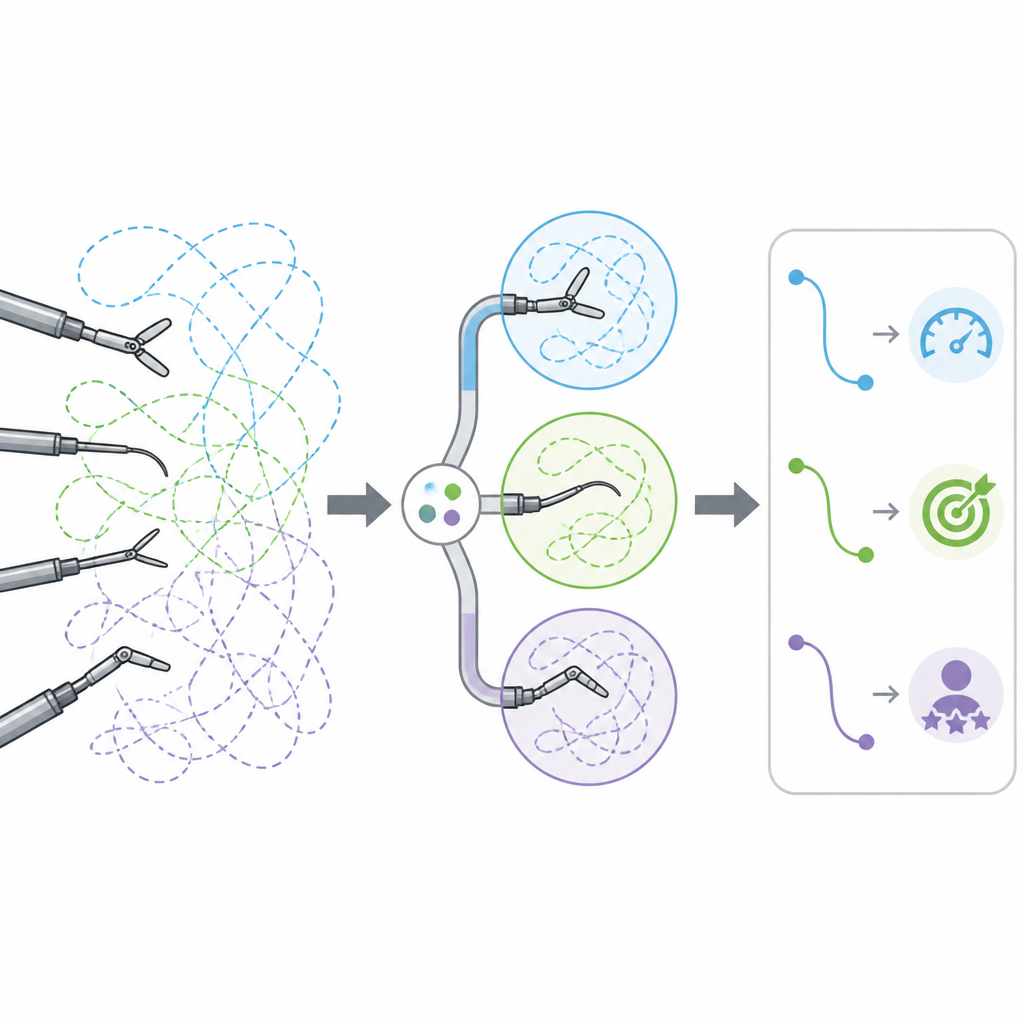
Forskargruppen tog sig an problemet genom att ställa en enkel fråga: i stället för att märka instrument efter vilken hand som håller dem, vad händer om vi grupperar dem efter vilken uppgift de utför i varje ögonblick? De byggde en semantisk ”taxonomi” som tilldelar varje robotinstrument en av tre roller under en uppgift. En passiv retraktor håller i första hand vävnad ur vägen. En aktiv retraktor hjälper till att exponera operationsfältet och stödja huvudåtgärden. Det dominerande instrumentet utför huvuduppgiften, såsom att skära, klämma eller sy. Genom att använda rörelsemönstren för varje verktyg och, för vissa uppgifter, typen av instrument som används, taggar algoritmen automatiskt verktygen med dessa roller och omorganiserar sedan de råa rörelseindikatorerna till en mindre, funktionsbaserad uppsättning.
Att förvandla rörig rörelse till renare signaler
Teamet tillämpade detta rollbaserade system på data från 462 robotoperationer: gallblåseuttagning, inguinalbråcksreparation och sleeve-gastrectomi. I den ursprungliga uppsättningen fanns mer än 300 möjliga rörelseindikatorer per fall, varav många var tomma eftersom inte varje instrument förekommer i varje uppgift. Med den nya taxonomin krympte det till strax över 60 rollbaserade indikatorer, och nästan alla innehöll användbara värden. När de jämförde algoritmens märkning med noggrann manuell granskning var överensstämmelsen vanligtvis mycket hög, särskilt i uppgifter med väldefinierade handlingar, vilket visar att rörelsemönstren bär tillräckligt med information för att känna igen vad varje verktyg gjorde större delen av tiden.
Att förutsäga hastighet och erfarenhet med färre ledtrådar
Det verkliga testet var om denna slanka, rollfokuserade vy av data kunde matcha eller överträffa den ursprungliga, omfattande uppsättningen när det gällde att förutsäga hur uppgifter fortlöpte. Med statistiska modeller ställde forskarna två frågor: körde en uppgift längre än väntat, och var huvudkirurgen en erfaren specialist eller en trainee? Modeller byggda på taxonomibaserade indikatorer behövde ungefär en tredjedel färre egenskaper för att nå sin bästa prestanda än modeller som använde konventionella indikatorer. Samtidigt var de något mer korrekta och balanserade i sina förutsägelser, vilket tyder på att fokus på vad varje verktyg är avsett att göra kan skärpa signalen som finns i rörelsedata.
Vad detta betyder för kirurger och patienter
Genom att ge varje instrument en tydlig funktionell roll och ta bort tomma eller överflödiga mätvärden förvandlar denna taxonomi komplex robotdata till en klarare bild av hur kirurgi faktiskt utförs. Detta kan hjälpa utbildare att avgöra om en elev behöver stabilisera en stödjande hand eller finslipa huvudskärandet, och det lägger grunden för mer tillförlitliga verktyg som övervakar teknik och kopplar den till patientutfall. Även om metoden fortfarande behöver testas i fler sjukhus och typer av ingrepp erbjuder den en praktisk väg mot att använda robotdata inte bara för att mäta rörelse, utan för att förstå och förbättra kirurgins hantverk.
Citering: Ballo, M., Tindal, E.W., Nussbaum, J. et al. Semantic taxonomy-driven instrument classification streamlines kinematic analysis of objective performance indicators in robotic surgery. npj Digit. Surg. 1, 6 (2026). https://doi.org/10.1038/s44484-025-00005-z
Nyckelord: robotkirurgi, bedömning av kirurgisk skicklighet, prestationsmått, maskininlärning, medicinsk utbildning