Clear Sky Science · ru
Классификация инструментов на основе семантической таксономии упрощает кинематический анализ объективных показателей эффективности в роботизированной хирургии
Почему умные данные робота важны в операционной
Роботизированная хирургия сейчас помогает врачам выполнять многие распространённые операции через небольшие разрезы, при этом генерируя поток данных о движениях по мере работы манипуляторов. В этом исследовании показано, что реорганизация таких данных вокруг того, что каждый инструмент фактически делает в момент времени, может значительно упростить оценку хирургического мастерства, направлять обучение и в конечном счёте способствовать более безопасным операциям для пациентов.
От интуиции к проверкам навыков на основе данных
В течение многих лет технические способности хирурга в основном оценивались другими людьми, которые наблюдали и ставили баллы его работе. Эти человеческие оценки полезны, но трудозатратны, могут различаться у разных рецензентов и редко дают мгновенную обратную связь. Современные роботы записывают каждый поворот и движение инструментов, а также видео и системные события. Эти измерения, называемые показателями эффективности, уже помогают отличать новичков от экспертов и связывать способы движения рук хирурга с исходами для пациентов. Проблема в том, что сейчас существует более сотни различных показателей, многие из которых трудно интерпретировать и редко используют.

Присваивая каждому инструменту понятную роль
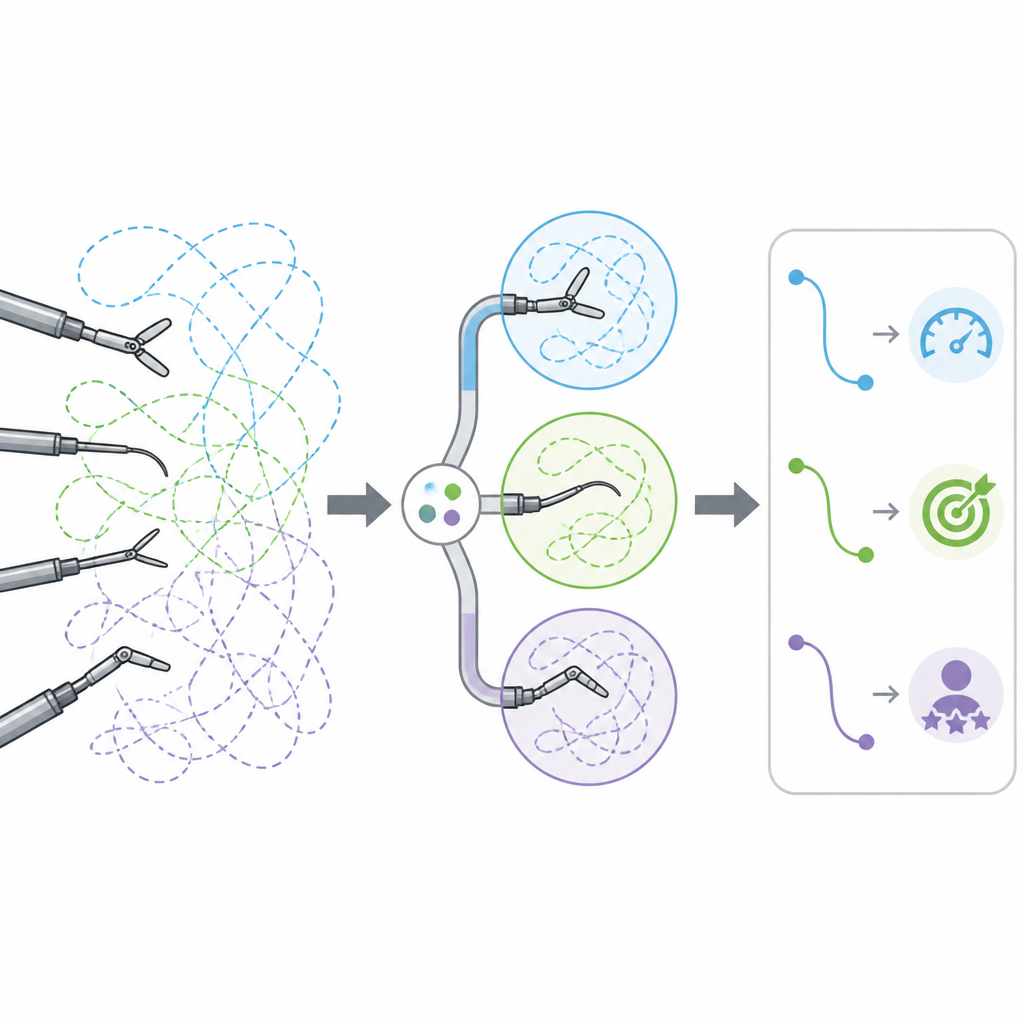
Исследовательская группа подошла к этой проблеме с простым вопросом: вместо того чтобы маркировать инструменты по тому, какой рукой ими держат, что если группировать их по задаче, которую они выполняют в каждый момент? Они создали семантическую «таксономию», которая назначает каждому роботизированному инструменту одну из трёх ролей в ходе задания. Пассивный ретрактор в основном удерживает ткани в стороне. Активный ретрактор помогает обнажить поле и поддерживает основное действие. Доминирующий инструмент выполняет ключевую работу, такую как разрезание, клипирование или наложение швов. Используя шаблоны движения каждого инструмента и, для некоторых задач, тип применяемого инструмента, алгоритм автоматически помечает инструменты этими ролями и затем реорганизует сырые кинематические показатели в меньший, основанный на функциях набор.
Преобразование шумных движений в более чистые сигналы
Команда применила эту систему на основе ролей к данным из 462 роботизированных операций: удаления желчного пузыря, восстановления паховой грыжи и рукавной гастрэктомии. В исходной конфигурации было более 300 возможных показателей движения на случай, многие из которых оставались пустыми, потому что не каждый инструмент задействован в каждой задаче. С новой таксономией это сократилось до чуть более 60 показателей, привязанных к ролям, и почти все они содержали пригодные для анализа значения. При проверке маркировки алгоритма по сравнению с тщательной ручной экспертизой согласие обычно было очень высоким, особенно в задачах с чётко определёнными действиями, что показывает: шаблоны движения несли достаточно информации, чтобы распознать, что делает каждый инструмент в большинстве случаев.
Прогнозирование скорости и опыта с меньшим числом подсказок
Главным испытанием было то, сможет ли этот компактный, ориентированный на роли взгляд на данные соперничать или превзойти разросшийся исходный набор при прогнозировании хода задач. С помощью статистических моделей исследователи задали два вопроса: длилась ли задача дольше ожидаемого, и был ли основной хирург опытным консультантом или обучающимся ординатором? Модели, построенные на показателях, основанных на таксономии, требовали примерно на одну треть меньше признаков, чтобы достичь наилучшей производительности, чем модели с традиционными показателями. При этом они были немного более точными и сбалансированными в своих прогнозах, что указывает на то, что фокус на том, для чего предназначен каждый инструмент, может упростить и усилить сигнал, скрытый в данных о движениях.
Что это значит для хирургов и пациентов
Присваивая каждому инструменту чёткую функциональную роль и устраняя пустые или избыточные измерения, эта таксономия превращает сложные данные робота в более ясную картину того, как фактически проводится операция. Это может помочь преподавателям точно определить, нужно ли ученику укрепить вспомогательную руку или отточить основное режущее движение, а также закладывает более надёжную основу для будущих инструментов, которые будут контролировать технику и связывать её с исходами для пациентов. Хотя подход ещё требует тестирования в других больницах и при других типах операций, он предлагает практичный путь к использованию данных роботов не просто для измерения движений, но и для понимания и улучшения мастерства хирургов.
Цитирование: Ballo, M., Tindal, E.W., Nussbaum, J. et al. Semantic taxonomy-driven instrument classification streamlines kinematic analysis of objective performance indicators in robotic surgery. npj Digit. Surg. 1, 6 (2026). https://doi.org/10.1038/s44484-025-00005-z
Ключевые слова: роботизированная хирургия, оценка хирургических навыков, показатели эффективности, машинное обучение, медицинское обучение