Clear Sky Science · nl
Semantische, taxonomiegestuurde instrumentclassificatie vereenvoudigt kinematische analyse van objectieve prestatie-indicatoren in robotchirurgie
Waarom slimmer robotdata ertoe doet in de operatiekamer
Robotchirurgie helpt artsen tegenwoordig bij veelvoorkomende ingrepen via kleine incisies en genereert daarbij een stroom bewegingsgegevens terwijl de robotarmen bewegen. Deze studie laat zien hoe het herstructureren van die data rond wat elk instrument daadwerkelijk doet het veel makkelijker kan maken om chirurgische vaardigheden te beoordelen, trainingen te sturen en uiteindelijk veiligere operaties voor patiënten te ondersteunen.
Van gevoel naar datagedreven vaardigheidscontrole
Jarenlang werd de technische bekwaamheid van een chirurg vooral beoordeeld door andere mensen die hun optreden bekeken en scoreerden. Die menselijke beoordelingen zijn nuttig maar tijdrovend, kunnen per beoordelaar verschillen en geven zelden directe terugkoppeling. Moderne robots registreren elke beweging van de instrumenten, samen met video en systeemgebeurtenissen. Deze metingen, prestatie-indicatoren genoemd, helpen al om beginners van experts te onderscheiden en leggen verbanden tussen hoe ze hun instrumenten bewegen en hoe patiënten het na de operatie doen. Het probleem is dat er nu meer dan honderd verschillende indicatoren zijn, waarvan veel moeilijk te interpreteren en zelden gebruikt.

Elk instrument een duidelijke functietitel geven
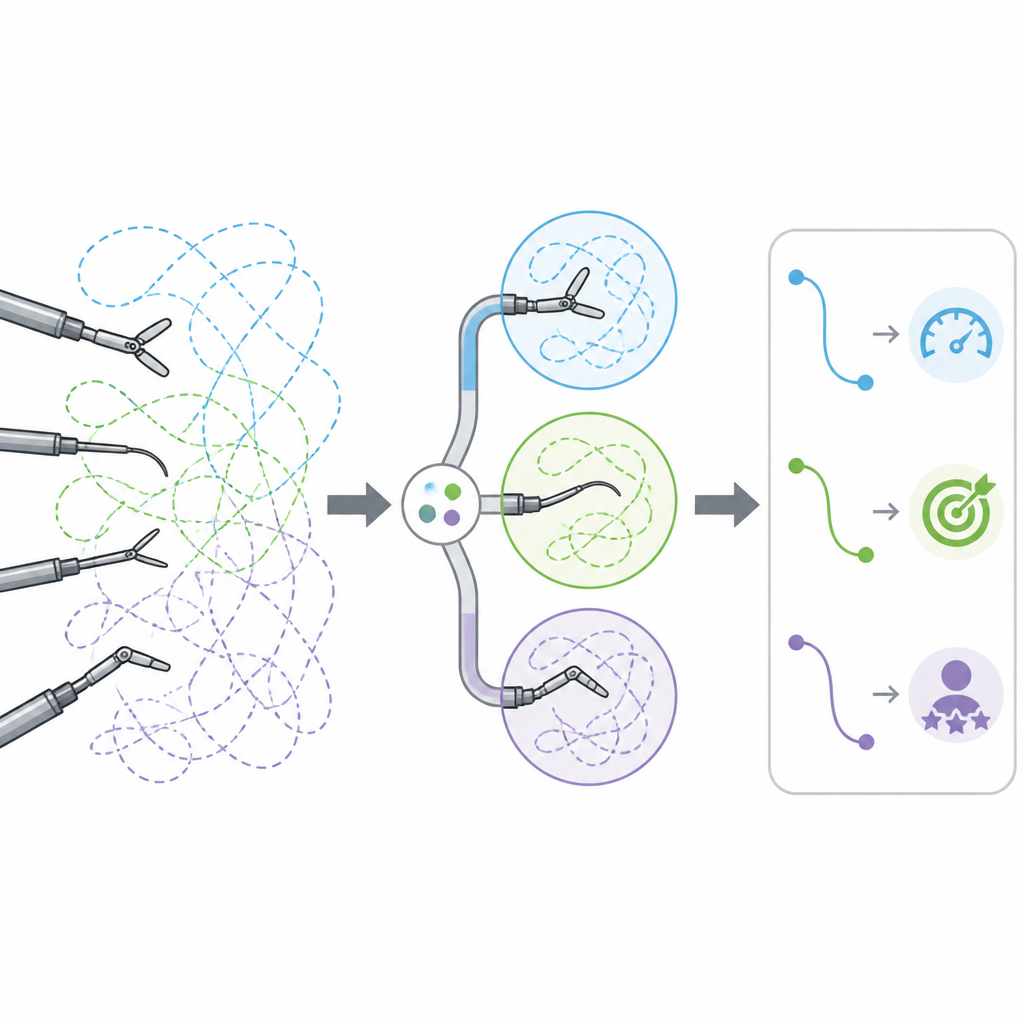
Het onderzoeksteam pakte dit probleem aan met een eenvoudige vraag: in plaats van instrumenten te labelen op basis van welke hand ze vasthoudt, wat als we ze groeperen op de taak die ze in elk moment uitvoeren? Ze bouwden een semantische "taxonomie" die elk robotinstrument tijdens een taak toewijst aan een van drie rollen. Een passieve retractor houdt voornamelijk weefsel uit de weg. Een actieve retractor helpt het operatieveld blootleggen en ondersteunt de hoofdactie. Het dominante instrument verricht het belangrijkste werk, zoals snijden, clippen of hechten. Met behulp van de bewegingspatronen van elk gereedschap en, voor bepaalde taken, het type instrument in gebruik, tagt het algoritme automatisch de instrumenten met deze rollen en herorganiseert vervolgens de ruwe bewegingsindicatoren in een kleinere, functiegebaseerde set.
Rommelige bewegingen omzetten in schonere signalen
Het team paste dit rolggebaseerde systeem toe op gegevens van 462 robotoperaties: galblaasverwijdering, liesbreukreparatie en sleeve-gastrectomie. In de originele opzet waren er meer dan 300 mogelijke bewegingsindicatoren per geval, waarvan veel leeg waren omdat niet elk instrument in elke taak voorkomt. Met de nieuwe taxonomie kromp dat terug tot net iets meer dan 60 rolgebaseerde indicatoren, en bijna allemaal bevatten ze bruikbare waarden. Toen ze de labelingen van het algoritme vergeleken met zorgvuldige menselijke beoordeling, was de overeenstemming meestal zeer hoog, vooral bij taken met goed gedefinieerde handelingen, wat aangeeft dat de bewegingspatronen voldoende informatie droegen om in de meeste gevallen te herkennen wat elk instrument deed.
Snelheid en ervaring voorspellen met minder aanwijzingen
De echte test was of deze compacte, rolgerichte kijk op de data kon evenaren of zelfs beter kon presteren dan de omvangrijke originele set bij het voorspellen van hoe taken verliepen. Met statistische modellen stelden de onderzoekers twee vragen: duurde een taak langer dan verwacht, en was de hoofdchirurg een ervaren specialist of een stagiair-arts? Modellen gebouwd op taxonomiegebaseerde indicatoren hadden ongeveer een derde minder kenmerken nodig om hun beste prestatie te bereiken dan modellen die conventionele indicatoren gebruikten. Tegelijkertijd waren ze licht accurater en beter gebalanceerd in hun voorspellingen, wat suggereert dat focus op wat elk instrument bedoeld is te doen het signaal dat in de bewegingsdata verborgen zit, kan verscherpen.
Wat dit betekent voor chirurgen en patiënten
Door ieder instrument een duidelijke functionele rol te geven en lege of redundante metingen weg te snijden, zet deze taxonomie complexe robotdata om in een helderder beeld van hoe chirurgie daadwerkelijk wordt uitgevoerd. Dit kan opleiders helpen vaststellen of een leerling een ondersteunende hand moet verstevigen of de hoofd-snijbeweging moet verfijnen, en het legt een betrouwbaardere basis voor toekomstige tools die techniek monitoren en koppelen aan patiëntuitkomsten. Hoewel de aanpak nog in meer ziekenhuizen en bij meer ingreepsoorten getest moet worden, biedt het een praktische route om robotdata niet alleen te meten, maar ook te begrijpen en de kunst van het opereren te verbeteren.
Bronvermelding: Ballo, M., Tindal, E.W., Nussbaum, J. et al. Semantic taxonomy-driven instrument classification streamlines kinematic analysis of objective performance indicators in robotic surgery. npj Digit. Surg. 1, 6 (2026). https://doi.org/10.1038/s44484-025-00005-z
Trefwoorden: robotchirurgie, beoordeling chirurgische vaardigheid, prestatiemetingen, machine learning, medische opleiding