Clear Sky Science · it
La classificazione degli strumenti guidata da una tassonomia semantica semplifica l’analisi cinematica degli indicatori di performance oggettivi nella chirurgia robotica
Perché dati robotici più intelligenti contano in sala operatoria
La chirurgia robotica oggi aiuta i medici a eseguire molte operazioni comuni attraverso piccole incisioni, generando un flusso enorme di dati di movimento mentre si muovono i bracci robotici. Questo studio mostra come riorganizzare quei dati attorno a ciò che ciascun strumento sta effettivamente facendo possa rendere molto più semplice valutare l’abilità chirurgica, orientare la formazione e, in ultima analisi, supportare operazioni più sicure per i pazienti.
Dal giudizio istintivo a controlli delle abilità basati sui dati
Per anni, l’abilità tecnica di un chirurgo è stata valutata principalmente da altre persone che osservavano e assegnavano un punteggio alla performance. Queste valutazioni umane sono utili ma richiedono tempo, possono variare da revisore a revisore e raramente offrono un feedback immediato. I robot moderni registrano ogni torsione e rotazione degli strumenti, insieme a video ed eventi di sistema. Queste misurazioni, chiamate indicatori di performance, aiutano già a separare i principianti dagli esperti e a mettere in relazione i movimenti delle mani con gli esiti dei pazienti dopo l’intervento. Il problema è che oggi esistono più di cento indicatori diversi, molti dei quali difficili da interpretare e usati di rado.

Dare a ogni strumento un titolo di lavoro chiaro
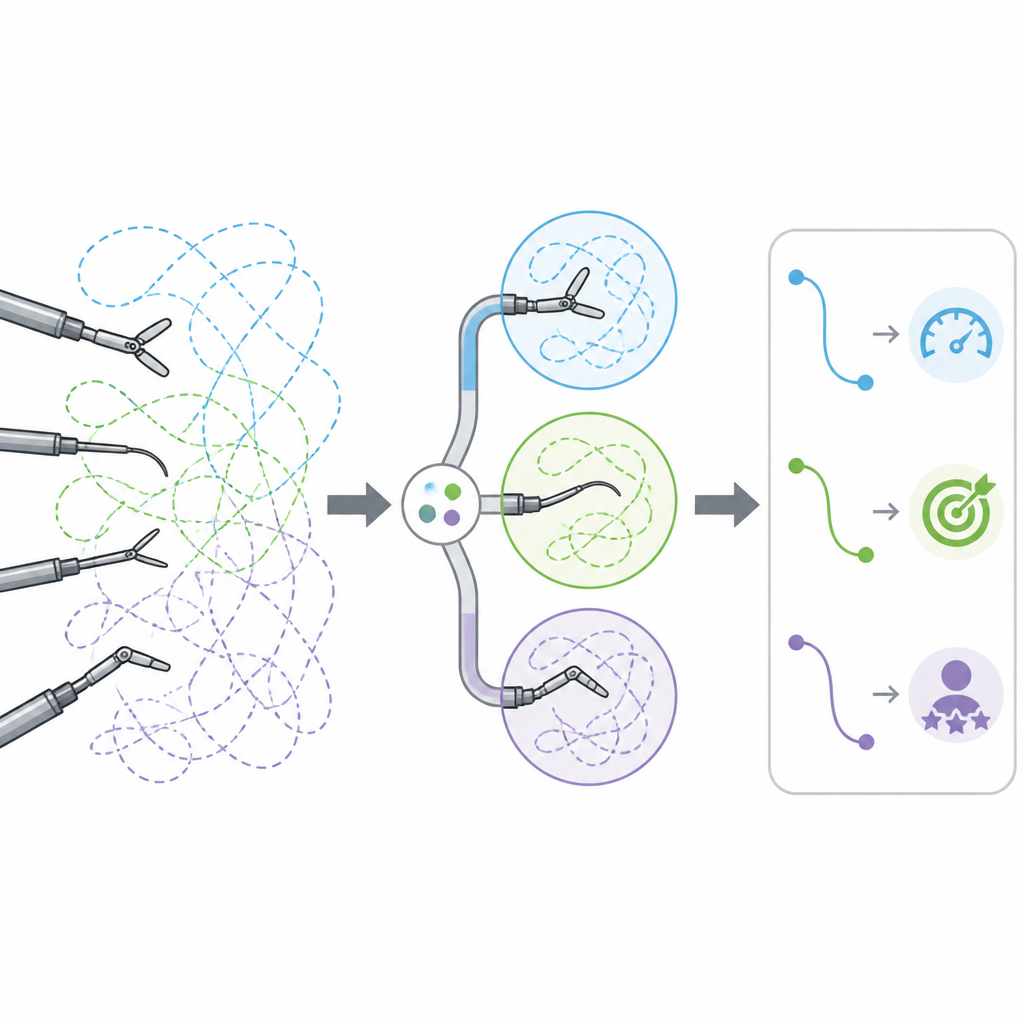
Il team di ricerca ha affrontato questo problema ponendosi una domanda semplice: invece di etichettare gli strumenti in base alla mano che li tiene, cosa succede se li raggruppiamo in base al compito che svolgono in ciascun momento? Hanno costruito una “tassonomia” semantica che assegna a ogni strumento robotico uno dei tre ruoli durante un compito. Un retrattore passivo mantiene principalmente i tessuti fuori dalla zona operatoria. Un retrattore attivo aiuta a esporre il campo e supporta l’azione principale. Lo strumento dominante svolge il lavoro chiave, come tagliare, posizionare clip o suturare. Utilizzando i pattern di movimento di ciascuno strumento e, per alcuni compiti, il tipo di strumento in uso, l’algoritmo etichetta automaticamente gli strumenti con questi ruoli e poi riorganizza gli indicatori grezzi di movimento in un set più piccolo e basato sulla funzione.
Trasformare movimenti disordinati in segnali più puliti
Il team ha applicato questo sistema basato sui ruoli a dati provenienti da 462 operazioni robotiche: colecistectomia, riparazione dell’ernia inguinale e gastrectomia a manica. Nella configurazione originale c’erano più di 300 possibili indicatori di movimento per caso, molti dei quali vuoti perché non tutti gli strumenti compaiono in ogni compito. Con la nuova tassonomia, quel numero si è ridotto a poco più di 60 indicatori basati sui ruoli, e quasi tutti contenevano valori utilizzabili. Confrontando le etichette dell’algoritmo con una revisione umana accurata, l’accordo è risultato generalmente molto alto, specialmente nei compiti con azioni ben definite, mostrando che i pattern di movimento contenevano abbastanza informazioni per riconoscere cosa stava facendo ogni strumento nella maggior parte dei casi.
Predire velocità ed esperienza con meno indizi
La vera prova era verificare se questa visione snella e focalizzata sui ruoli dei dati potesse eguagliare o superare l’ampio set originale nel predire lo svolgimento dei compiti. Usando modelli statistici, i ricercatori hanno posto due domande: un compito è durato più a lungo del previsto? E il chirurgo principale era un primario esperto o un medico in formazione? I modelli costruiti sugli indicatori basati sulla tassonomia hanno richiesto circa un terzo di caratteristiche in meno per raggiungere la loro massima performance rispetto ai modelli che utilizzavano indicatori convenzionali. Allo stesso tempo, erano leggermente più accurati ed equilibrati nelle loro previsioni, suggerendo che concentrarsi su ciò che ogni strumento dovrebbe fare può affilare il segnale nascosto nei dati di movimento.
Cosa significa questo per chirurghi e pazienti
Assegnando a ogni strumento un chiaro ruolo funzionale e eliminando misurazioni vuote o ridondanti, questa tassonomia trasforma i complessi dati robotici in un quadro più nitido di come viene effettivamente eseguita la chirurgia. Questo può aiutare gli educatori a individuare se un apprendista deve stabilizzare una mano di supporto o perfezionare il movimento di taglio principale, e pone una base più affidabile per futuri strumenti che monitorano la tecnica e la mettono in relazione con gli esiti dei pazienti. Pur richiedendo ulteriori test in altri ospedali e tipi di interventi, l’approccio offre una strada pratica per usare i dati robotici non solo per misurare il movimento, ma per comprendere e migliorare l’arte della chirurgia.
Citazione: Ballo, M., Tindal, E.W., Nussbaum, J. et al. Semantic taxonomy-driven instrument classification streamlines kinematic analysis of objective performance indicators in robotic surgery. npj Digit. Surg. 1, 6 (2026). https://doi.org/10.1038/s44484-025-00005-z
Parole chiave: chirurgia robotica, valutazione delle abilità chirurgiche, metriche di performance, apprendimento automatico, formazione medica