Clear Sky Science · pt
Classificação de instrumentos guiada por taxonomia semântica simplifica análise cinemática de indicadores objetivos de desempenho em cirurgia robótica
Por que dados robóticos mais inteligentes importam na sala de cirurgia
A cirurgia robótica agora ajuda médicos a realizar muitas operações comuns por meio de incisões pequenas, gerando um volume grande de dados de movimento à medida que os braços robóticos se deslocam. Este estudo mostra como reorganizar esses dados em torno do que cada ferramenta está realmente fazendo pode tornar muito mais fácil julgar a habilidade cirúrgica, orientar o treinamento e, em última instância, apoiar operações mais seguras para os pacientes.
Do instinto à verificação de habilidade orientada por dados
Durante anos, a habilidade técnica de um cirurgião foi avaliada principalmente por outras pessoas observando e pontuando seu desempenho. Essas avaliações humanas são úteis, mas consomem tempo, podem variar entre avaliadores e raramente oferecem retorno instantâneo. Robôs modernos registram cada torção e movimento dos instrumentos, junto com vídeo e eventos do sistema. Essas medições, chamadas de indicadores de desempenho, já ajudam a distinguir cirurgiões novatos de experientes e relacionam como eles movem as mãos com os desfechos dos pacientes após a cirurgia. O problema é que hoje existem mais de cem indicadores diferentes, muitos difíceis de interpretar e raramente usados.

Atribuindo a cada ferramenta um título de função claro
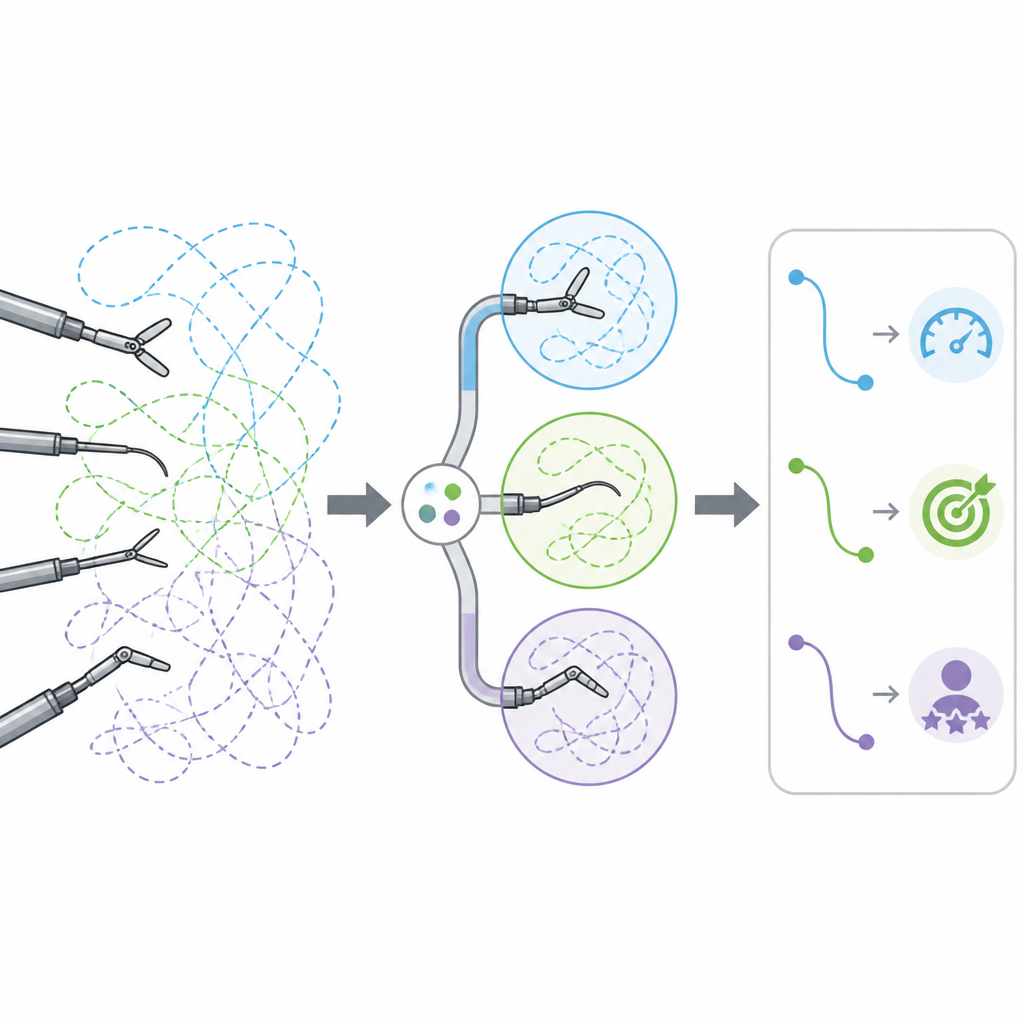
A equipe de pesquisa abordou esse problema fazendo uma pergunta simples: em vez de rotular os instrumentos por qual mão os segura, e se os agrupássemos pelo papel que desempenham em cada momento? Eles construíram uma “taxonomia” semântica que atribui cada instrumento robótico a um de três papéis durante uma tarefa. Um retrator passivo mantém principalmente o tecido afastado. Um retrator ativo ajuda a expor o campo e apoia a ação principal. O instrumento dominante realiza o trabalho-chave, como cortar, aplicar clipes ou suturar. Usando os padrões de movimento de cada ferramenta e, para certas tarefas, o tipo de instrumento em uso, o algoritmo marca automaticamente as ferramentas com esses papéis e então reorganiza os indicadores brutos de movimento em um conjunto menor, baseado na função.
Transformando movimento confuso em sinais mais limpos
A equipe aplicou esse sistema baseado em papéis a dados de 462 operações robóticas: remoção da vesícula biliar, correção de hérnia inguinal e gastrectomia vertical. Na configuração original, havia mais de 300 possíveis indicadores de movimento por caso, muitos dos quais estavam vazios porque nem todo instrumento aparece em toda tarefa. Com a nova taxonomia, isso encolheu para pouco mais de 60 indicadores baseados em função, e quase todos continham valores utilizáveis. Quando compararam as marcações do algoritmo com uma revisão humana cuidadosa, o acordo foi geralmente muito alto, especialmente em tarefas com ações bem definidas, mostrando que os padrões de movimento continham informação suficiente para reconhecer o que cada ferramenta estava fazendo na maior parte do tempo.
Prevendo velocidade e experiência com menos pistas
O teste real foi se essa visão enxuta e focada no papel dos dados poderia igualar ou superar o conjunto original extenso ao prever como as tarefas se desenrolavam. Usando modelos estatísticos, os pesquisadores fizeram duas perguntas: a tarefa durou mais do que o esperado, e o cirurgião principal era um assistente experiente ou um residente em treinamento? Modelos construídos com indicadores baseados na taxonomia precisaram de aproximadamente um terço a menos de características para alcançar seu melhor desempenho do que modelos usando indicadores convencionais. Ao mesmo tempo, foram ligeiramente mais precisos e equilibrados em suas previsões, sugerindo que focar no que cada ferramenta se propõe a fazer pode afiar o sinal escondido nos dados de movimento.
O que isso significa para cirurgiões e pacientes
Ao dar a cada instrumento um papel funcional claro e eliminar medições vazias ou redundantes, essa taxonomia transforma dados robóticos complexos em uma imagem mais clara de como a cirurgia é realmente executada. Isso pode ajudar educadores a identificar se um aprendiz precisa estabilizar uma mão de apoio ou refinar o movimento principal de corte, e estabelece uma base mais confiável para ferramentas futuras que monitorem a técnica e a relacionem aos desfechos dos pacientes. Embora a abordagem ainda precise ser testada em mais hospitais e tipos de operações, ela oferece um caminho prático para usar dados robóticos não apenas para medir movimento, mas para entender e aprimorar a arte da cirurgia.
Citação: Ballo, M., Tindal, E.W., Nussbaum, J. et al. Semantic taxonomy-driven instrument classification streamlines kinematic analysis of objective performance indicators in robotic surgery. npj Digit. Surg. 1, 6 (2026). https://doi.org/10.1038/s44484-025-00005-z
Palavras-chave: cirurgia robótica, avaliação de habilidade cirúrgica, métricas de desempenho, aprendizado de máquina, treinamento médico