Clear Sky Science · zh
基于水蛭分布式机械感受的生物启发式导航
一条简单的蠕虫如何教会更聪明的感知
水生动物常通过感受水中的涟漪来寻找食物并躲避危险。这项研究展示了卑微的水蛭如何以其遍布全身的小型触觉传感器启发机器人和其它机器,采用许多廉价探测器而非少数昂贵传感器来导航。通过构建一个水蛭如何整合遍布身体的传感器信号的计算模型,作者们探讨了动物如何在部分传感器噪声大、损坏或缺失时仍保持航向——以及工程师如何借用相同的策略。
一具布满微小“耳朵”的身体
水蛭是研究“多者合为一体”这一问题的理想对象。它们的身体布满近300个能感知水流、光线和化学物质的小型感觉器官。借助这个分布式网络,水蛭可以检测到游动猎物产生的涟漪并朝源头靠拢。然而,生物学家仍不完全清楚所有这些独立信号在神经系统中如何被组合以控制运动,或者当一整片传感器停止工作时其行为会如何改变。在活体上做此类详尽实验极为困难,因此作者转而构建了一个简化的数字水蛭模型。
构建数字水蛭
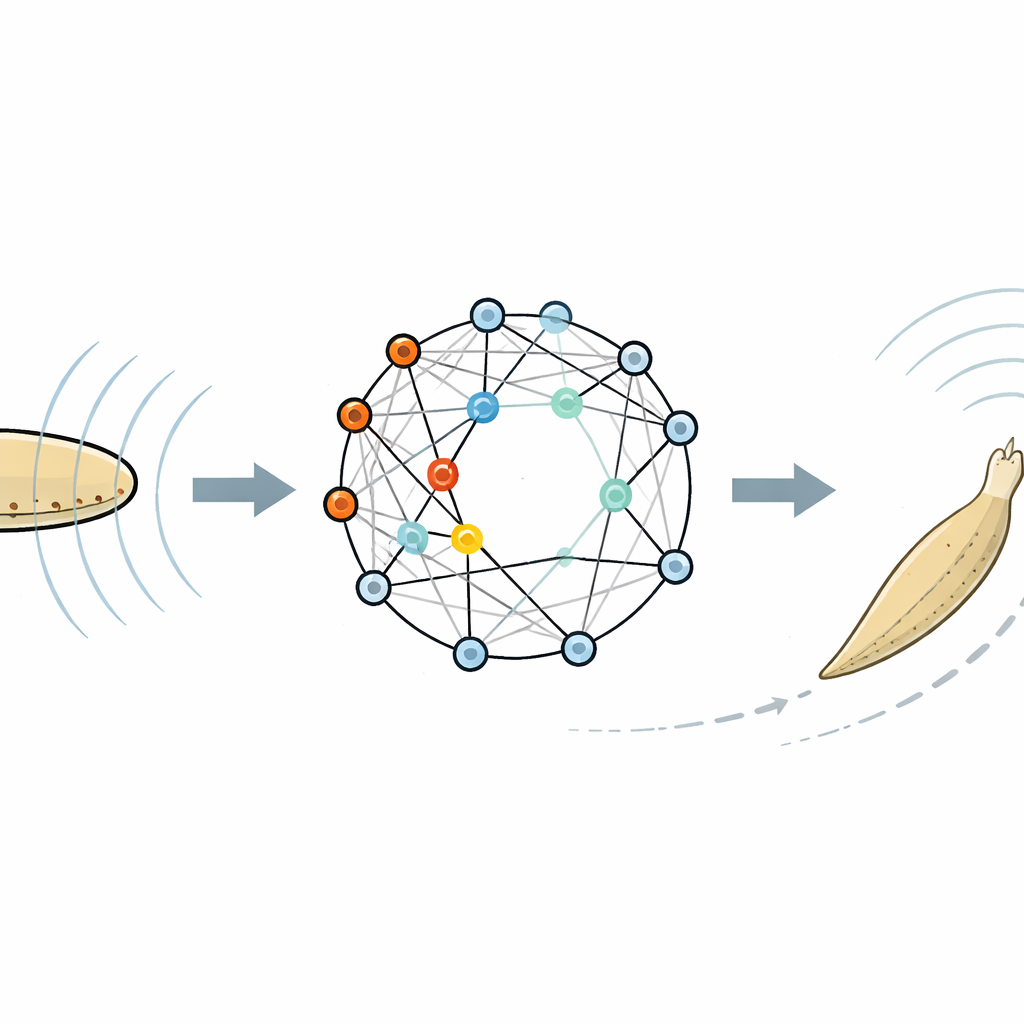
在计算模型中,水蛭柔软的身体被一个刚性椭圆体取代,环绕着 24 组等间距的传感器组,每组代表许多真实传感器。这些传感器组感知入射水波,其强度取决于传感器面对波源的角度以及波的频率。它们的输出进入一个“胜者通吃”网络——一圈互相兴奋与抑制的神经群体,直到只有一小片区域变得强烈活跃。该活跃区域指向某个方向,模拟水蛭便朝该方向转动并向前游动。通过重复这种感知—决策—移动的循环,代理试图到达波源。
在涟漪中找到最佳频段
当研究团队改变水波的频率和神经网络的灵敏阈值时,代理的行为与在实验水槽中测试的真实水蛭非常接近。极低频的波几乎不会刺激传感器,因此代理几乎直线游动,很少找到目标。极高频的波会同时过度激活许多传感器,导致代理向随机方向旋转,同样错过目标。在这两种极端之间存在一个最佳区间:当波频约为每秒 8–12 个循环且神经灵敏度适中时,只有一个小簇的神经群体变得强烈活跃,代理可靠地朝源头前进。这与实验证明活体水蛭表现最佳的频率范围一致,表明该简化模型捕捉到了其感知策略的关键特征。
当传感器失效会发生什么?
该模型便于通过“虚拟手术”关闭选定的传感器组来进行实验。从身体整个一侧移除传感器会导致在所有测试频率下表现较差,表明左右输入比较对于导航至关重要。其他布局产生了更微妙的影响。例如,仅禁用前部传感器在典型频率下几乎不影响表现,尽管路径向目标弯曲得更缓。在某些布局中,意外地,移除前部或前后部传感器后,代理的表现反而更好——但前提是波频稍高。结果暗示改变传感器数量和布局可能会移动最佳频段而不一定使导航变差,这一模式也与真实水蛭随生长而敏感性变化的情况相呼应。
当更多传感器胜过噪声数据
研究者们还通过在输入信号中加入随机误差来测试代理应对噪声和不可靠传感器的能力。在“高质量”传感器条件下,不论代理有 8、24 还是 72 组传感器,表现都类似。但当传感器质量下降时,增加传感器数量就有帮助:在 72 个噪声较大的传感器情况下,代理仍能比只有 8 个传感器时更常成功,因为来自多个方向的正确信号往往会压倒错误信号。这提示了真实水蛭可能携带大量简单传感器的一个原因:冗余使它们能滤除环境杂波和损伤,同时仍能定位有用的扰动。
从池塘蠕虫到未来机器
总体而言,该研究表明一种相对简单的感知与决策方案即可再现真实水蛭在定位水波源方面的大部分能力。通过调整神经网络的灵敏度、改变传感器的数量和布置,模型能够预测何时导航会成功或失败。对于非专业读者,主要结论是自然常用许多适度的探测器和一种稳健的“让最强模式取胜”的方式来解决复杂任务——例如在嘈杂、多变的世界中保持航向,而不是依靠完美传感器或大量计算。相同的理念可为未来的水下机器人、医疗设备或结构监测器的设计提供指导,使它们在部分传感器噪声或失效时仍能继续工作。
引用: Gill, J.P., Nichols, S.T., Motevalian, M. et al. Bioinspired navigation based on distributed mechanoreception in the leech. npj Robot 4, 24 (2026). https://doi.org/10.1038/s44182-026-00082-3
关键词: 水蛭导航, 分布式感知, 机械感受, 胜者通吃网络, 生物启发机器人