Clear Sky Science · tr
Engerekte dayanaklı dağıtılmış mekanoresepsiyon temelli biyoinspire navigasyon
Basit Bir Solucan Nasıl Daha Akıllı Algılamalar Öğretebilir
Su canlıları genellikle su yüzeyindeki dalgaları hissederek yiyecek bulur ve tehlikeden kaçınır. Bu çalışma, küçük dokunma algılayıcılarıyla kaplı sıradan sülüğün, birkaç pahalı sensör yerine çok sayıda basit dedektör kullanan robotlar ve makineler için yeni gezinme yöntemlerine ilham verebileceğini gösteriyor. Sülüğün vücut geneline dağılmış sensörlerden gelen sinyalleri nasıl birleştirebileceğine dair bir bilgisayar modeli oluşturarak, yazarlar bazı sensörler gürültülü, zarar görmüş veya eksik olsa bile hayvanların rotayı nasıl koruduğunu ve mühendislerin aynı hileleri nasıl ödünç alabileceğini araştırıyor.
Küçük Kulaklarla Kaplı Bir Vücut
Sülükler “çokların bir olarak çalışması” sorusu için ideal deney zemini oluşturur. Vücutları, su hareketini, ışığı ve kimyasalları hissedebilen neredeyse 300 küçük algı organıyla kaplıdır. Bu dağıtılmış ağ sayesinde bir sülük, yüzen bir avın oluşturduğu dalgaları algılayabilir ve kaynağına doğru yönelir. Yine de biyologlar, tüm bu bireysel sinyallerin sinir sisteminde tam olarak nasıl birleştirildiğini ya da sensörlerin büyük bölümleri çalışmayı durdurduğunda davranışın nasıl değişeceğini hâlâ tam olarak bilmiyor. Canlı hayvanlar üzerinde bu kadar ayrıntılı deneyler yapmak son derece zor olduğundan yazarlar basitleştirilmiş dijital bir sülüğe başvurdu.
Dijital Bir Sülük İnşa Etmek
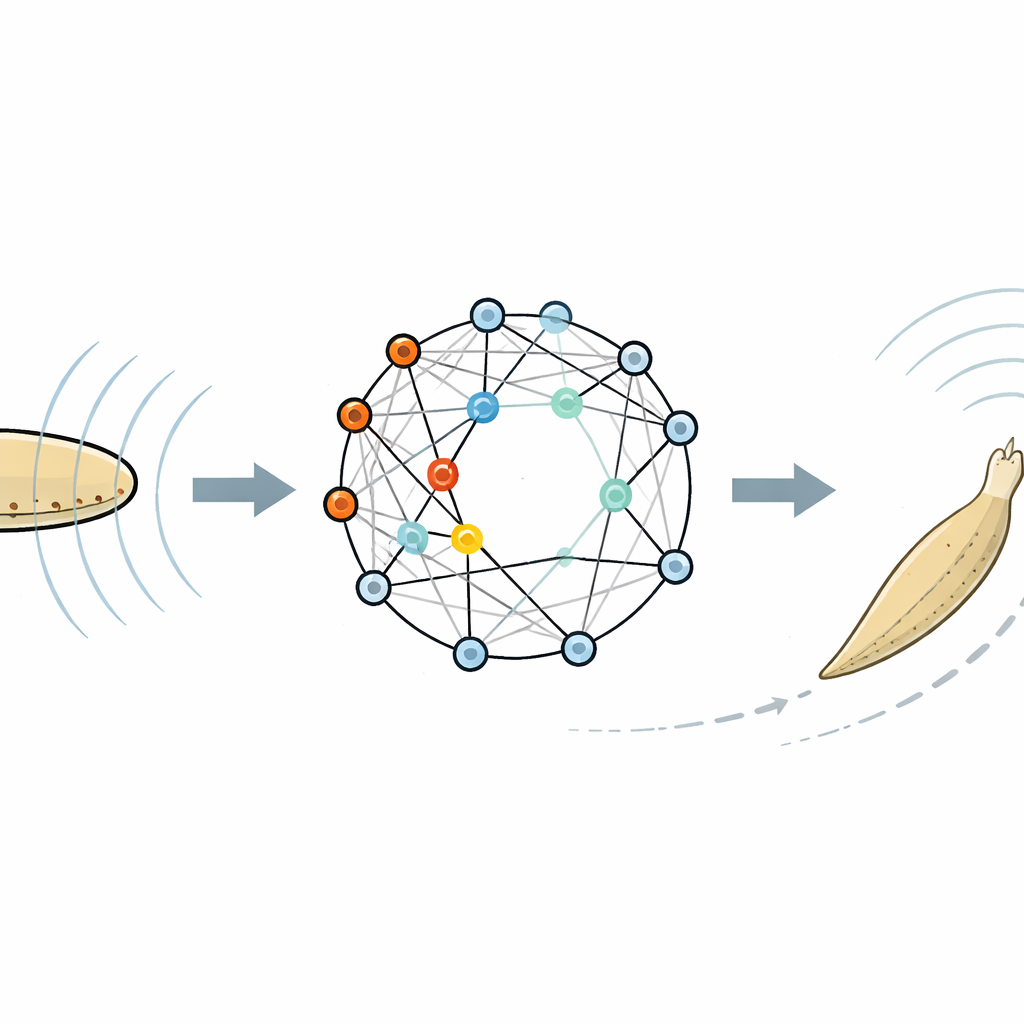
Bilgisayar modelinde sülüğün esnek gövdesi, etrafına eşit aralıklarla yerleştirilmiş yalnızca 24 sensör grubuna sahip sert bir oval ile değiştirilir; her grup birçok gerçek sensörü temsil eder. Bu gruplar, dalga kaynağına ne kadar doğrudan baktıklarına ve dalganın frekansına bağlı olarak gücü değişen su dalgalarını algılar. Çıktıları, birbirlerini uyarıp inhibe eden ve yalnızca küçük bir bölgenin güçlü biçimde aktif hale gelmesine kadar süren bir “winner-take-all” ağına beslenir. O aktif bölge belirli bir yöne işaret eder ve simüle edilen sülük bu yöne döndükten sonra ileri doğru yüzer. Bu algıla–karar ver–hareket döngüsünü tekrarlayarak, ajan dalgaların kaynağına ulaşmayı dener.
Dalgaların Tatlı Noktasını Bulmak
Ekip dalga frekansını ve sinir ağı duyarlılık eşiğini değiştirdiğinde, ajanın davranışı tankta test edilmiş gerçek sülüklerin davranışıyla yakından eşleşti. Çok düşük frekanslı dalgalar sensörleri zar zor uyarmış, bu yüzden ajan neredeyse düz ilerlemiş ve nadiren hedefi bulmuş. Çok yüksek frekanslı dalgalar aynı anda birçok sensörü aşırı uyararak ajanın rastgele yönlerde dönmesine ve hedefi kaçırmasına yol açmış. Bu uçlar arasında bir tatlı nokta vardı: saniyede yaklaşık 8–12 döngü civarındaki dalga frekansları ve uygun sinirsel duyarlılık ile yalnızca küçük bir sinir popülasyonu kümesi güçlü biçimde aktif oluyor ve ajan güvenilir şekilde kaynağa doğru yöneliyordu. Canlı sülüklerin deneylerde en iyi performans gösterdiği frekans aralığı da bu olduğundan, basitleştirilmiş modelin onların algılama stratejisinin temel özelliklerini yakaladığı öneriliyor.
Sensörler Arızalandığında Ne Olur?
Model, seçilmiş sensör gruplarını kapatarak “sanal cerrahi” yapmayı kolaylaştırdı. Vücudun bir yanındaki sensörlerin tümünün kaldırılması, tüm test edilen frekanslarda kötü performansa yol açtı; bu da sol ve sağ girdilerin karşılaştırılmasının navigasyon için kritik olduğunu gösteriyor. Diğer düzenlemeler daha ince etkiler üretti. Örneğin sadece ön sensörlerin devre dışı bırakılması tipik bir frekansta performansı neredeyse etkilemedi, ancak hedefe doğru yollar daha yavaş kıvrıldı. şaşırtıcı şekilde, bazen ön veya ön-ve-arka sensörlerin kaldırıldığı bazı düzenlerde ajan aslında biraz daha yüksek dalga frekanslarında daha iyi performans gösterdi. Bu sonuçlar, sensör sayısının ve yerleşiminin değiştirilmesinin en iyi frekans aralığını kaydırabileceğini, ancak mutlaka gezinmeyi kötüleştirmeyeceğini ima ediyor; bu desen, büyüdükçe gerçek sülüklerin duyarlılığının değişmesine de ışık tutuyor.
Daha Fazla Sensör Gürültülü Veriyi Yendiğinde
Araştırmacılar ayrıca gelen sinyallere rastgele hatalar ekleyerek ajanın gürültülü, güvenilmez sensörlerle nasıl başa çıktığını da inceledi. “Yüksek kaliteli” sensörlerle performans, ajanın 8, 24 veya 72 sensör grubuna sahip olup olmadığına göre benzerdi. Ancak sensör kalitesi bozulduğunda daha fazla sensör yardımcı oldu: 72 gürültülü sensör olduğunda, ajan yalnızca 8 sensöre kıyasla hala çok daha sık başarılı olabiliyordu çünkü birçok yönden gelen doğru sinyaller kötü olanları gölgede bırakma eğilimindeydi. Bu, gerçek sülüklerin neden bu kadar çok basit sensöre sahip olabileceğine dair bir neden sunuyor: yedeklilik, çevresel karışıklığı ve hasarı filtrelemelerini ve yine de yararlı rahatsızlıklara yönelmelerini sağlıyor.
Gölette Yaşayan Solucanlardan Geleceğin Makinelerine
Genel olarak çalışma, nispeten basit bir algılama ve karar verme şemasının su dalgalarının kaynağını bulmadaki gerçek sülüğün yeteneğinin büyük bölümünü yeniden üretebileceğini gösteriyor. Sinir ağının ne kadar hassas olduğunun ayarlanması ve kaç sensörün bulunduğu ile bunların nerede yer aldığının değiştirilmesi yoluyla model, navigasyonun ne zaman başarılı olacağını veya başarısızlığa uğrayacağını öngörüyor. Genel okuyucu için ana çıkarım şudur: doğa genellikle mükemmel sensörlerle veya yoğun hesaplamayla değil, birçok mütevazı dedektör ve en güçlü desenin “kazanmasına” izin veren sağlam bir yöntemle gürültülü, değişken bir dünyada karmaşık görevleri çözer. Aynı fikir, bazı sensörlerin gürültülü hale geldiği veya bozulduğu durumlarda bile çalışmaya devam etmesi gereken sualtı robotları, medikal cihazlar veya yapı izleme sistemleri için gelecekteki tasarımları yönlendirebilir.
Atıf: Gill, J.P., Nichols, S.T., Motevalian, M. et al. Bioinspired navigation based on distributed mechanoreception in the leech. npj Robot 4, 24 (2026). https://doi.org/10.1038/s44182-026-00082-3
Anahtar kelimeler: sülük navigasyonu, dağıtılmış algılama, mekanoresepsiyon, winner-take-all ağı, biyoinspire robotik