Clear Sky Science · nl
Bio-geïnspireerde navigatie gebaseerd op gedistribueerde mechanoreceptie in de bloedzuiger
Hoe een eenvoudig wormpje slimmer zintuigen kan leren
Waterdieren vinden vaak voedsel en vermijden gevaar door trillingen in het water te voelen. Deze studie laat zien hoe de bescheiden bloedzuiger, bedekt met kleine aanraksensoren, kan inspireren tot nieuwe manieren waarop robots en andere machines kunnen navigeren met veel eenvoudige detectoren in plaats van een paar dure sensoren. Door een computermodel te bouwen van hoe een bloedzuiger signalen van sensoren over zijn hele lichaam zou kunnen combineren, onderzoeken de auteurs hoe dieren op koers blijven, ook wanneer sommige sensoren ruisig, beschadigd of afwezig zijn — en hoe ingenieurs dezelfde trucjes kunnen toepassen.
Een lichaam vol kleine oren
Bloedzuigers zijn ideale proefmodellen voor de vraag van “veel die als één werken.” Hun lichaam zit vol met bijna 300 kleine zintuiglijke organen die waterbeweging, licht en chemicaliën kunnen waarnemen. Met dit gedistribueerde netwerk kan een bloedzuiger de rimpels detecteren die een zwemmend prooidier maakt en zich vervolgens op de bron richten. Biologen weten echter nog steeds niet precies hoe al deze individuele signalen in het zenuwstelsel worden gecombineerd om het dier te sturen, of hoe zijn gedrag verandert als hele gedeeltes van sensoren uitvallen. Dergelijke gedetailleerde experimenten op levende dieren zijn uiterst moeilijk, dus keerden de auteurs zich tot een vereenvoudigde digitale bloedzuiger.
Een digitale bloedzuiger bouwen
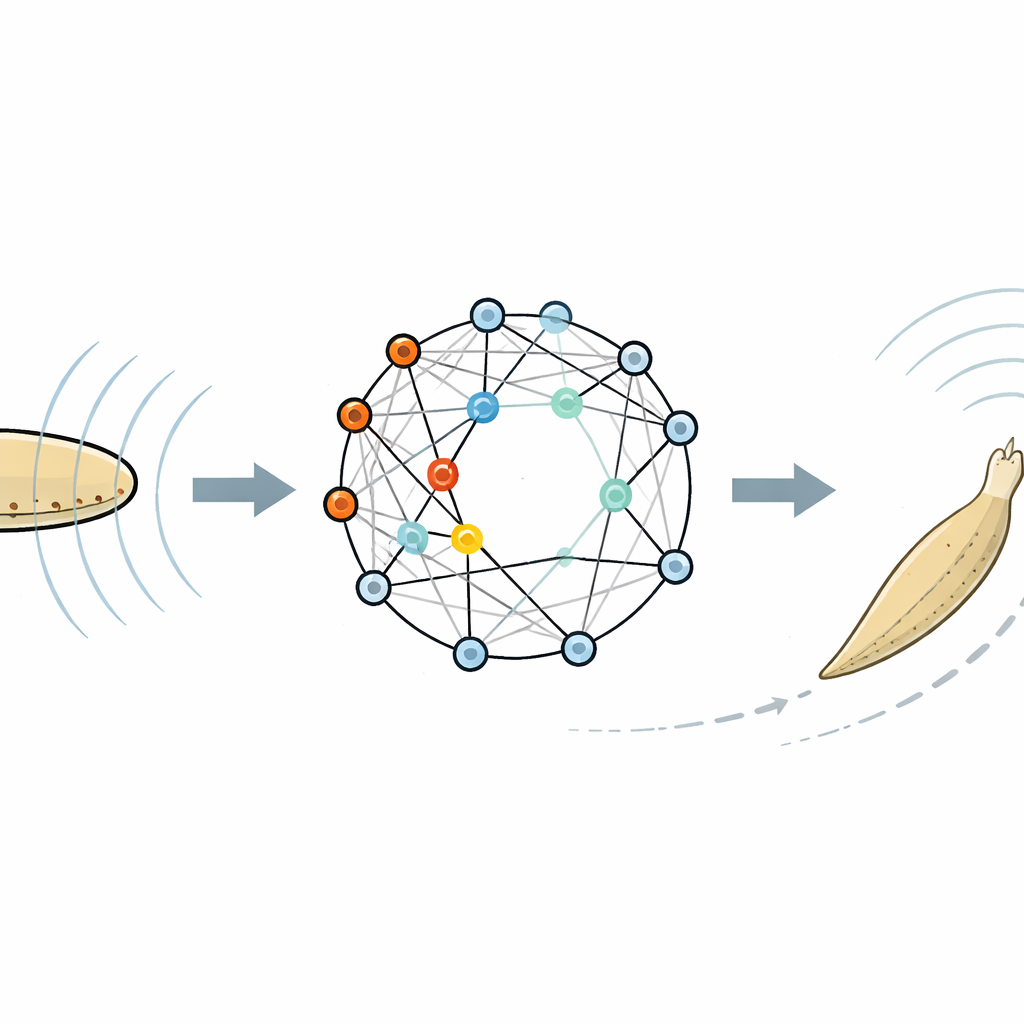
In het computermodel is het flexibele lichaam van de bloedzuiger vervangen door een stijve ovaal met slechts 24 sensorgroepen gelijkmatig daaromheen geplaatst, waarbij elke groep staat voor vele echte sensoren. Deze groepen voelen binnenkomende watergolven waarvan de sterkte afhangt van hoe recht ze naar de golfbron gericht zijn en van de frequentie van de golf. Hun uitgangen voeden een "winner-take-all"-netwerk — een ring van neuronale populaties die elkaar stimuleren en remmen totdat slechts een klein gebied sterk actief wordt. Dat actieve gebied wijst in een bepaalde richting, waarna de gesimuleerde bloedzuiger daarop draait voordat hij vooruit zwemt. Door deze voelen–beslissen–bewegen-lus te herhalen probeert de agent de bron van de golven te bereiken.
Het vinden van het zoete punt in de rimpels
Toen het team de frequentie van de watergolven en de gevoeligheidsdrempel van het neuronale netwerk varieerde, kwam het gedrag van de agent nauw overeen met dat van echte bloedzuigers getest in een bassin. Zeer lage frequenties prikkelden de sensoren nauwelijks, waardoor de agent vrijwel rechtdoor zwierf en zelden het doel vond. Zeer hoge frequenties overstimuleerden veel sensoren tegelijk, waardoor de agent in willekeurige richtingen draaide en opnieuw het doel miste. Tussen deze extremen was er een zoet punt: bij golffrequenties rond 8–12 cycli per seconde en een passende neurale gevoeligheid werd slechts een kleine cluster neuronale populaties sterk actief, en stuurde de agent betrouwbaar naar de bron. Dit is dezelfde frequentiebereik waarin levende bloedzuigers in experimenten het best presteren, wat suggereert dat het vereenvoudigde model belangrijke kenmerken van hun zintuigstrategie vastlegt.
Wat gebeurt er als sensoren uitvallen?
Het model maakte het eenvoudig om "virtuele chirurgie" uit te voeren door geselecteerde sensorgroepen uit te schakelen. Het verwijderen van sensoren aan één kant van het lichaam leidde tot slechte prestaties bij alle geteste frequenties, wat impliceert dat het vergelijken van links- en rechtsinput cruciaal is voor navigatie. Andere patronen gaven subtielere effecten. Zo deed het uitschakelen van alleen de frontale sensoren weinig afbreuk aan de prestatie bij een typische frequentie, hoewel de banen geleidelijker naar het doel kronkelden. Verrassend genoeg presteerde de agent in sommige configuraties waarin front- of front-en-achter-sensoren waren verwijderd zelfs beter — maar bij iets hogere golffrequenties. Deze resultaten suggereren dat het veranderen van het aantal en de plaatsing van sensoren het optimale frequentiebereik kan verschuiven zonder navigatie per se slechter te maken, een patroon dat echoot hoe de gevoeligheid van echte bloedzuigers verandert naarmate ze groeien.
Wanneer meer sensoren ruisige data te slim af zijn
De onderzoekers vroegen ook hoe goed de agent kon omgaan met ruisige, onbetrouwbare sensoren door willekeurige fouten toe te voegen aan de binnenkomende signalen. Met "hoogwaardige" sensoren was de prestatie vergelijkbaar of de agent nu 8, 24 of 72 sensorgroepen had. Maar wanneer de sensorkwaliteit verslechterde, hielp het toevoegen van meer sensoren: met 72 ruisige sensoren slaagde de agent veel vaker dan met slechts 8, omdat de juiste signalen uit veel richtingen de slechte signalen overheersten. Dit wijst op een reden waarom echte bloedzuigers zoveel eenvoudige sensoren zouden kunnen hebben: redundantie stelt hen in staat om omgevingsruis en beschadiging te filteren en toch bruikbare verstoringen te lokaliseren.
Van vijverbewonende wormen naar toekomstige machines
Al met al toont de studie aan dat een relatief eenvoudig schema voor waarnemen en besluitvorming veel van het vermogen van echte bloedzuigers om de bron van waterrimpels te lokaliseren kan reproduceren. Door te variëren hoe gevoelig het neuronale netwerk is, en door te veranderen hoeveel sensoren beschikbaar zijn en waar ze geplaatst zijn, voorspelt het model wanneer navigatie zal slagen of falen. Voor de niet‑specialist is de belangrijkste les dat de natuur vaak complexe taken — zoals sturen door een ruisende, veranderlijke wereld — niet oplost met perfecte sensoren of zware berekeningen, maar met veel bescheiden detectoren en een robuuste manier om het sterkste patroon te laten "winnen." Ditzelfde idee kan toekomstige ontwerpen voor onderwaterrobots, medische apparaten of structurele bewakingssystemen sturen die door moeten blijven werken, zelfs als sommige van hun sensoren ruisig worden of uitvallen.
Bronvermelding: Gill, J.P., Nichols, S.T., Motevalian, M. et al. Bioinspired navigation based on distributed mechanoreception in the leech. npj Robot 4, 24 (2026). https://doi.org/10.1038/s44182-026-00082-3
Trefwoorden: bloedzuiger navigatie, gedistribueerde detectie, mechanoreceptie, winner-take-all-netwerk, bio-geïnspireerde robotica