Clear Sky Science · fr
Navigation bio-inspirée basée sur la mécanoréception distribuée chez la sangsue
Comment un ver simple peut enseigner une détection plus intelligente
Les animaux aquatiques trouvent souvent de la nourriture et évitent le danger en percevant les ondulations de l’eau. Cette étude montre comment la modeste sangsue, couverte de minuscules capteurs tactiles, peut inspirer de nouvelles façons pour les robots et autres machines de se repérer en utilisant de nombreux détecteurs simples plutôt que quelques capteurs coûteux. En construisant un modèle informatique de la façon dont une sangsue pourrait combiner les signaux provenant de capteurs répartis sur tout son corps, les auteurs explorent comment les animaux restent sur la bonne trajectoire même lorsque certains capteurs sont bruyants, endommagés ou absents — et comment les ingénieurs pourraient emprunter les mêmes astuces.
Un corps couvert de petites oreilles
Les sangsues sont des sujets idéaux pour cette question du « plusieurs qui font un seul ». Leur corps est hérissé d’environ 300 petits organes sensoriels capables de sentir le mouvement de l’eau, la lumière et les produits chimiques. Avec ce réseau distribué, une sangsue peut détecter les ondulations produites par une proie nageant et se diriger ensuite vers la source. Pourtant, les biologistes ignorent encore exactement comment tous ces signaux individuels sont combinés dans le système nerveux pour orienter l’animal, ou comment son comportement changerait si des zones entières de capteurs cessaient de fonctionner. Réaliser de telles expériences détaillées sur des animaux vivants est extrêmement difficile, aussi les auteurs se sont tournés vers une sangsue numérique simplifiée.
Construire une sangsue numérique
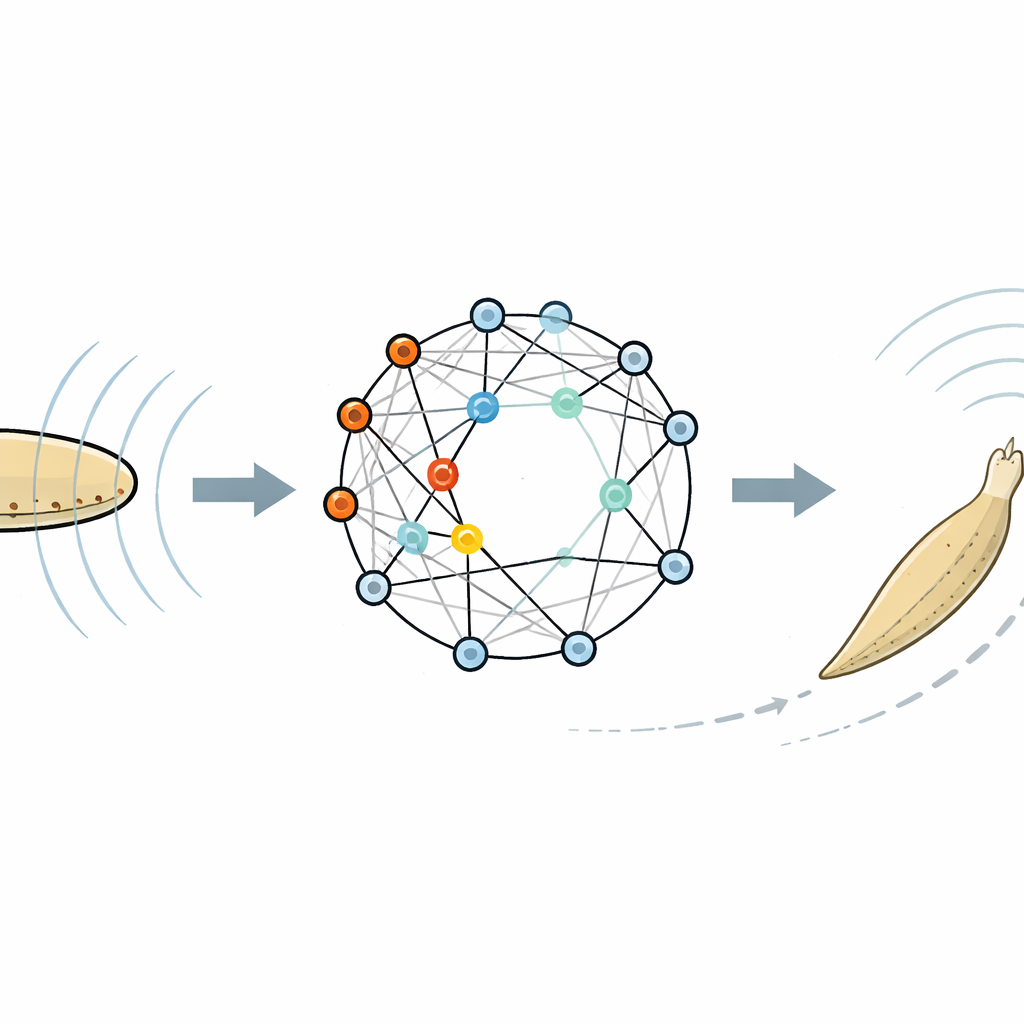
Dans le modèle informatique, le corps flexible de la sangsue est remplacé par un ovale rigide avec seulement 24 groupes de capteurs disposés régulièrement autour de lui, chaque groupe représentant de nombreux capteurs réels. Ces groupes perçoivent des ondes d’eau entrantes dont l’intensité dépend de l’orientation par rapport à la source et de la fréquence de l’onde. Leurs sorties alimentent un réseau « winner-take-all » — un anneau de populations neuronales qui s’excitent et s’inhibent mutuellement jusqu’à ce qu’une petite région devienne fortement active. Cette région active indique une direction particulière, vers laquelle la sangsue simulée se tourne avant de nager en avant. En répétant cette boucle sentir–décider–bouger, l’agent tente d’atteindre la source des ondes.
Trouver la zone de fréquence idéale dans les ondulations
Lorsque l’équipe a fait varier la fréquence des ondes et le seuil de sensibilité du réseau neuronal, le comportement de l’agent correspondait étroitement à celui de sangsues réelles testées dans un bac. Les ondes de très basse fréquence chatouillaient à peine les capteurs, si bien que l’agent errait presque en ligne droite et trouvait rarement la cible. Les ondes de très haute fréquence surexcitaient de nombreux capteurs à la fois, faisant tourner l’agent dans des directions aléatoires et lui faisant manquer encore la cible. Entre ces extrêmes, il existait une zone idéale : avec des fréquences d’onde autour de 8–12 cycles par seconde et une sensibilité neuronale adaptée, seule une petite grappe de populations neuronales devenait fortement active, et l’agent se dirigeait de manière fiable vers la source. Il s’agit de la même gamme de fréquences où les sangsues vivantes performent le mieux en expérience, ce qui suggère que le modèle simplifié capture des caractéristiques clés de leur stratégie de détection.
Que se passe-t-il lorsque des capteurs tombent en panne ?
Le modèle a facilité la « chirurgie virtuelle » en désactivant des groupes de capteurs sélectionnés. Retirer les capteurs d’un côté entier du corps conduisait à de mauvaises performances à toutes les fréquences testées, ce qui implique que la comparaison des entrées gauche et droite est cruciale pour la navigation. D’autres schémas produisaient des effets plus subtils. Par exemple, désactiver uniquement les capteurs avant nuisait peu aux performances à une fréquence typique, bien que les trajectoires se courbent plus progressivement vers la cible. De manière surprenante, dans certaines configurations où les capteurs avant ou avant-et-arrière étaient retirés, l’agent performait en réalité mieux — mais à des fréquences d’onde légèrement plus élevées. Ces résultats suggèrent que modifier le nombre et la disposition des capteurs peut déplacer la plage de fréquences optimale sans nécessairement détériorer la navigation, un schéma qui fait écho aux changements de sensibilité observés chez les sangsues réelles au fur et à mesure de leur croissance.
Quand plus de capteurs battent des données bruyantes
Les chercheurs ont aussi testé la capacité de l’agent à gérer des capteurs bruyants et peu fiables en ajoutant des erreurs aléatoires aux signaux entrants. Avec des capteurs de « haute qualité », les performances étaient similaires que l’agent dispose de 8, 24 ou 72 groupes de capteurs. Mais lorsque la qualité des capteurs se dégradait, en ajouter davantage aidait : avec 72 capteurs bruyants, l’agent pouvait encore réussir beaucoup plus souvent qu’avec seulement 8, parce que les signaux corrects provenant de nombreuses directions avaient tendance à l’emporter sur les mauvais. Cela suggère une raison pour laquelle les sangsues réelles portent tant de capteurs simples : la redondance leur permet de filtrer le désordre environnemental et les dommages tout en continuant à se diriger vers des perturbations utiles.
Des vers d’étang aux machines de demain
Dans l’ensemble, l’étude montre qu’un schéma de détection et de prise de décision relativement simple peut reproduire une grande partie de la capacité réelle de la sangsue à localiser la source des ondulations de l’eau. En ajustant la sensibilité du réseau neuronal, et en changeant le nombre et l’emplacement des capteurs disponibles, le modèle prédit quand la navigation réussira ou échouera. Pour le lecteur non spécialiste, la conclusion principale est que la nature résout souvent des tâches complexes — comme se diriger dans un monde bruyant et changeant — non pas avec des capteurs parfaits ou un calcul lourd, mais avec de nombreux détecteurs modestes et un moyen robuste de laisser le motif le plus fort « gagner ». Cette même idée pourrait guider les futurs designs de robots sous-marins, d’appareils médicaux ou de capteurs structurels qui doivent continuer à fonctionner même lorsque certains de leurs capteurs deviennent bruyants ou tombent en panne.
Citation: Gill, J.P., Nichols, S.T., Motevalian, M. et al. Bioinspired navigation based on distributed mechanoreception in the leech. npj Robot 4, 24 (2026). https://doi.org/10.1038/s44182-026-00082-3
Mots-clés: navigation des sangsues, détection distribuée, mécanoréception, réseau winner-take-all, robotique bio-inspirée