Clear Sky Science · ar
التنقُّل المُلهم بالحياة استنادًا إلى الاستشعار الميكانيكي الموزّع في العلقة
كيف يمكن لدودة بسيطة أن تعلم حسًّا أذكى
تجد الحيوانات المائية غالبًا طعامها وتتجنب الخطر عبر إحساسها بالتموُّجات في الماء. تُظهر هذه الدراسة كيف أن العلقة المتواضعة، المغطّاة بمستشعرات لمسية صغيرة، يمكن أن تُلهم طرقًا جديدة للروبوتات والآلات الأخرى للتنقّل باستخدام العديد من الكاشفات البسيطة بدلًا من عدد قليل مكلف. من خلال بناء نموذج حاسوبي لكيفية دمج العلقة لإشارات المستشعرات المنتشرة في جسدها، يستكشف المؤلفون كيف تبقى الحيوانات على المسار حتى عندما تكون بعض المستشعرات مضطربة أو متضررة أو مفقودة—وكيف يمكن للمهندسين استعارة نفس الأساليب.
جسم مغطّى بآذانٍ صغيرة
تعد العلقات منصة اختبار مثالية لمسألة «كثير يعمل كواحد». فأجسامها مملوءة بما يقرب من 300 عضو استشعاري صغير يمكنه إحساس حركة الماء والضوء والمواد الكيميائية. بواسط ة هذه الشبكة الموزّعة، تستطيع العلقة اكتشاف التموُّجات التي تحدثها فريسة تسبح ثم التوجّه نحو مصدرها. ومع ذلك لا يزال البيولوجيون لا يعرفون بالضبط كيف تُدمج كل هذه الإشارات الفردية في الجهاز العصبي لتوجيه الحيوان، أو كيف سيتغير سلوكه إذا تعطّلت رقع كاملة من المستشعرات. وإجراء مثل هذه التجارب التفصيلية على حيوانات حية صعب للغاية، لذا لجأ المؤلفون إلى علقة رقمية مبسطة.
بناء علقة رقمية
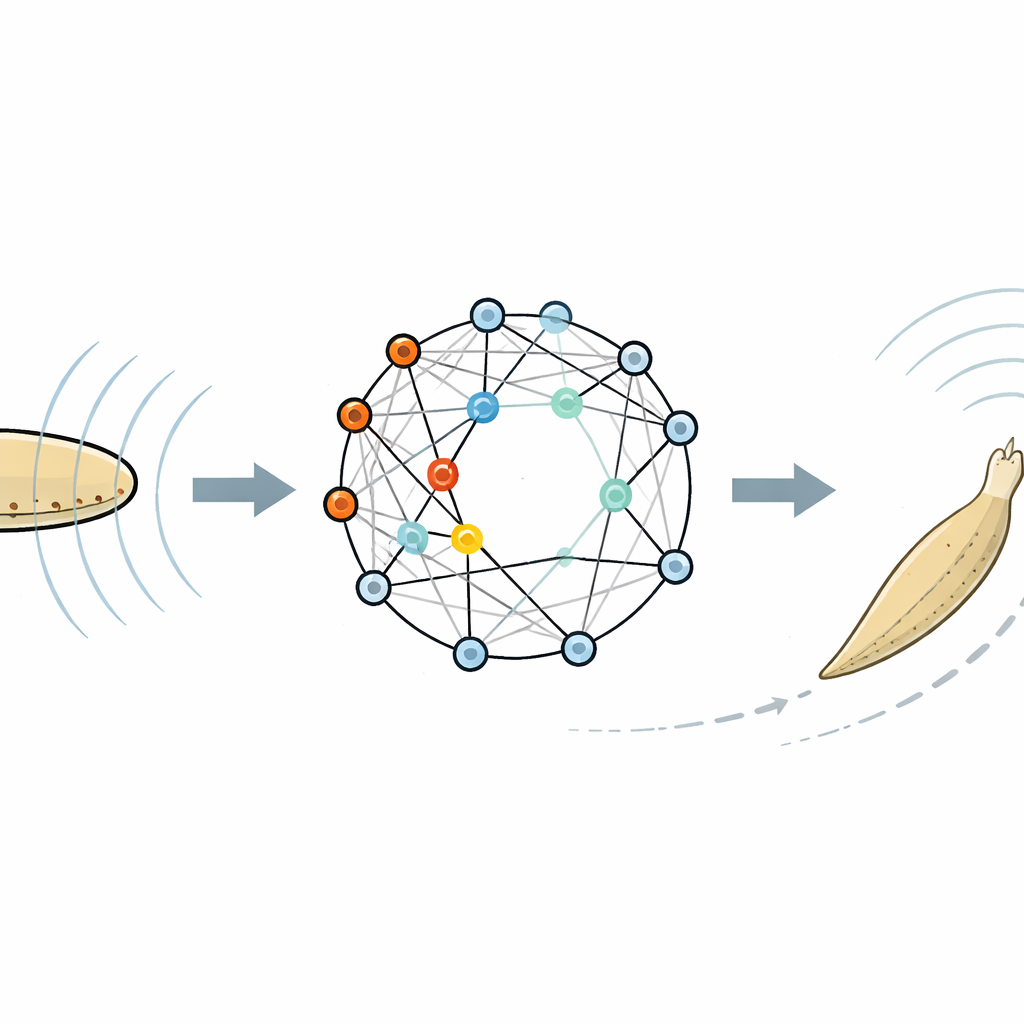
في النموذج الحاسوبي، استُبدل جسم العلقة المرن بشكل بيضاوي صلب يحمل 24 مجموعة مستشعر متباعدة بالتساوي حوله، حيث تمثل كل مجموعة العديد من المستشعرات الحقيقية. تشعر هذه المجموعات بالتموُّجات المائية الواردة التي تعتمد شدتها على مدى مواجهتها المباشرة لمصدر الموجة وعلى تردّد الموجة. تغذي مخرجاتها شبكة «الفائز يأخذ كل شيء»—حلقة من تجمعات عصبية تتبادل الإثارة والتثبيط حتى تصبح منطقة صغيرة فقط نشطة بقوة. تشير تلك المنطقة النشطة إلى اتجاهٍ معين، فتدوّر العلقة المحاكاة نحوها ثم تسبح إلى الأمام. من خلال تكرار دورة الإحساس–اتخاذ القرار–الحركة، يحاول الوكيل الوصول إلى مصدر الموجات.
العثور على النقطة المناسبة في التموُّجات
عندما غيّر الفريق تردّد الموجات المائية وعَتبة حساسية الشبكة العصبية، تناسب سلوك الوكيل عن كثب مع سلوك العلقات الحقيقية التي اختُبرت في حوض. كانت الموجات منخفضة التردّد بالكاد تثير المستشعرات، لذا كان الوكيل يَتجول تقريبًا في خط مستقيم ونادرًا ما يجد الهدف. أما الموجات عالية التردّد فكانت تفرط في تحفيز العديد من المستشعرات دفعة واحدة، مما تسبب في دوران الوكيل عشوائيًا وفشله مجددًا في الوصول إلى الهدف. بين هذين النقيضين، وُجدت نقطة مناسبة: عند تردّدات حوالي 8–12 دورة في الثانية وحساسية عصبية ملائمة، تنشط فقط مجموعة صغيرة من التجمعات العصبية بقوة، ويقود الوكيل بثبات نحو المصدر. هذه هي نفس نطاق التردّد الذي تؤدي فيه العلقات الحية بشكل أفضل في التجارب، مما يلمّح إلى أن النموذج المبسّط يلتقط ميزات رئيسية من استراتيجيّة استشعارها.
ماذا يحدث عندما تتعطل المستشعرات؟
مكن النموذج الباحثين من إجراء «جراحة افتراضية» عن طريق إيقاف مجموعات مختارة من المستشعرات. أدّت إزالة مستشعرات من جانب كامل للجسم إلى أداء ضعيف عند جميع التردّدات المختبرة، ما يوحي بأن مقارنة المدخلات اليمنى واليسرى أمر حاسم للملاحة. أنتجت أنماط أخرى آثارًا أكثر دقة. على سبيل المثال، تعطيل المستشعرات الأمامية فقط بالكاد أضر بالأداء عند تردّد نموذجي، رغم أن المسارات انحنت تدريجيًا أكثر نحو الهدف. والمفاجئ أن في بعض التوزيعات التي أُزيلت فيها المستشعرات الأمامية أو الأمامية والخلفية معًا، قدّم الوكيل أداءً أفضل—ولكن عند تردّدات موجية أعلى قليلًا. تشير هذه النتائج إلى أن تغيير عدد والمكان للمستشعرات قد يحوّل نطاق التردّد الأمثل دون بالضرورة أن يفاقم قدرة الملاحة، وهو نمط يواكب كيف تتغير حساسية العلقات الحقيقية مع نموها.
عندما تفوق كثر المستشعرات البيانات المزعجة
سأل الباحثون أيضًا كيف يتعامل الوكيل مع مستشعرات مضطربة وغير موثوقة عبر إضافة أخطاء عشوائية إلى الإشارات الواردة. مع مستشعرات «عالية الجودة»، كان الأداء مشابهًا سواء كان لدى الوكيل 8 أو 24 أو 72 مجموعة مستشعر. لكن عندما تدهورت جودة المستشعرات، أفاد وجود المزيد من المستشعرات بفائدة: مع 72 مستشعرًا مضطربًا، استطاع الوكيل النجاح في كثير من الأحيان أكثر بكثير من وجود 8 فقط، لأن الإشارات الصحيحة من اتجاهات عديدة تميل إلى التغلب على الإشارات الخاطئة. يشير هذا إلى سبب محتمل لحمل العلقات الحقيقية لهذا العدد الكبير من المستشعرات البسيطة: التكرار يتيح لها فلترة الضجيج والضرر البيئي مع الاستمرار في التوّجه نحو الاضطرابات المفيدة.
من ديدان البرك إلى آلات المستقبل
بشكل عام، تُظهر الدراسة أن مخططًا نسبيًا بسيطًا من الاستشعار واتخاذ القرار يمكنه إعادة إنتاج جزء كبير من قدرة العلقة الحقيقية على تحديد مصدر التموُّجات المائية. من خلال ضبط حساسية الشبكة العصبية، وتغيير عدد المستشعرات المتاحة ومواقعها، يتنبأ النموذج بمتى سينجح التنقّل ومتى سيفشل. للخلاصة: كثيرًا ما تحل الطبيعة مهامًا معقّدة—مثل التوجُّه في عالمٍ مزعج ومتغيّر—ليس بواسطة مستشعرات مثالية أو حسابات ثقيلة، بل عبر العديد من الكواشف المتواضعة وطريقة قوية لتمييز النمط الأقوى. قد تُوجّه الفكرة نفسها تصاميم مستقبلية لروبوتات تحت الماء أو أجهزة طبية أو مراقبة هيكلية يجب أن تستمر بالعمل حتى عندما تصبح بعض مستشعراتها مضطربة أو تتعطل.
الاستشهاد: Gill, J.P., Nichols, S.T., Motevalian, M. et al. Bioinspired navigation based on distributed mechanoreception in the leech. npj Robot 4, 24 (2026). https://doi.org/10.1038/s44182-026-00082-3
الكلمات المفتاحية: تنقل العلقة, الاستشعار الموزّع, الاستقبال الميكانيكي, شبكة الفائز يأخذ كل شيء, الروبوتات المستوحاة من الطبيعة