Clear Sky Science · de
Bioinspirierte Navigation basierend auf verteilter Mechanorezeption beim Blutegel
Wie ein einfacher Wurm schlauere Wahrnehmung lehren kann
Wasserlebewesen finden oft Nahrung und vermeiden Gefahren, indem sie Wellen im Wasser ertasten. Diese Studie zeigt, wie der unscheinbare Blutegel, übersät mit winzigen Berührungssensoren, neue Wege für die Navigation von Robotern und anderen Maschinen inspirieren kann: statt weniger teurer Sensoren viele einfache Detektoren zu verwenden. Durch den Aufbau eines Computermodells dafür, wie ein Blutegel Signale von Sensoren über seinen Körper hinweg zusammenführt, untersuchen die Autoren, wie Tiere auf Kurs bleiben, selbst wenn einige Sensoren verrauscht, beschädigt oder ausgefallen sind – und welche Tricks sich Ingenieure davon abschauen können.
Ein Körper voller winziger Ohren
Blutegel sind ideale Testobjekte für die Frage „viele wirken als eins“. Ihre Körper sind mit fast 300 kleinen Sinnesorganen besetzt, die Wasserbewegung, Licht und Chemikalien wahrnehmen können. Mit diesem verteilten Netz kann ein Egel die Wellen eines schwimmenden Beutetiers erkennen und auf deren Quelle zusteuern. Biologen wissen jedoch noch nicht genau, wie all diese Einzelsignale im Nervensystem kombiniert werden, um das Tier zu steuern, oder wie sich sein Verhalten verändert, wenn große Sensorbereiche ausfallen. Solch detaillierte Versuche an lebenden Tieren sind extrem schwierig, also griffen die Autoren zu einem vereinfachten digitalen Egel.
Aufbau eines digitalen Egels
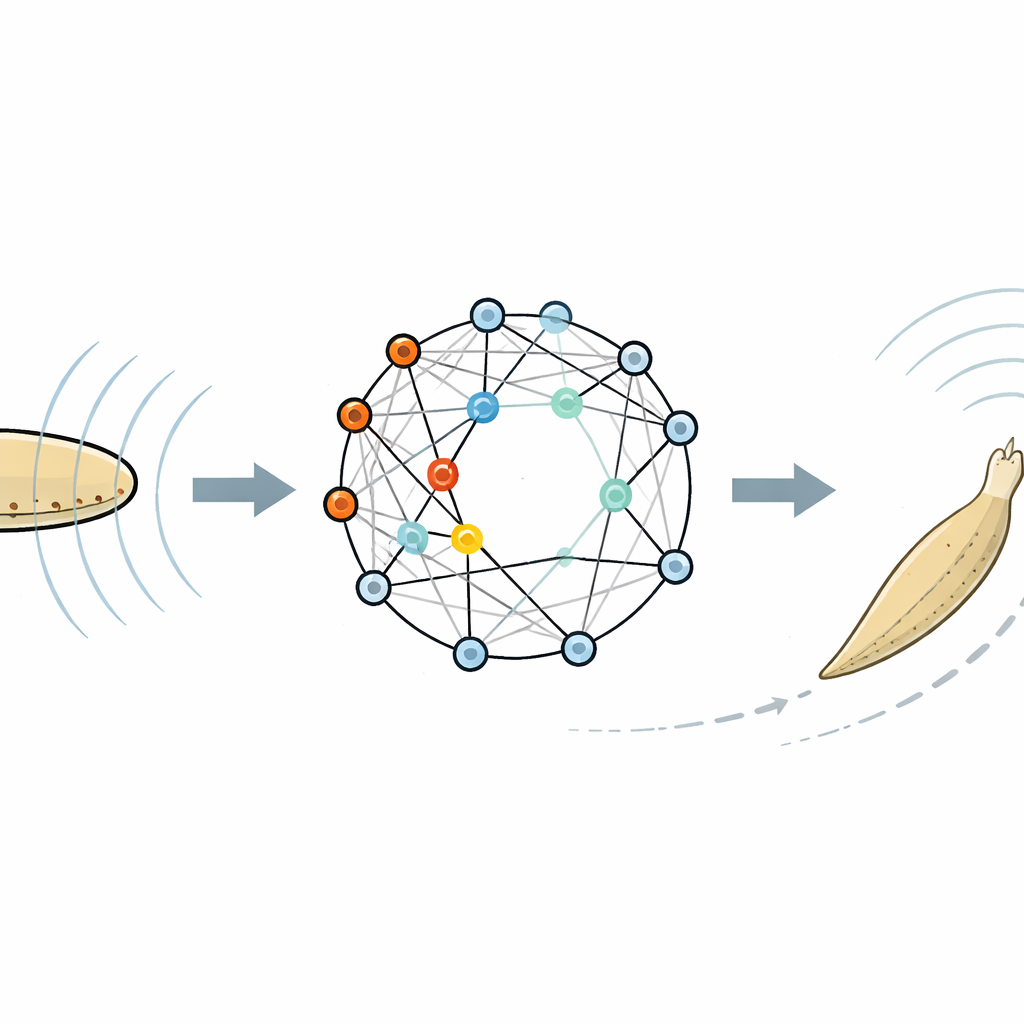
Im Computermodell wurde der flexible Körper des Egels durch ein starres Oval ersetzt, an dem nur 24 Sensorgruppen gleichmäßig verteilt sitzen, wobei jede Gruppe viele echte Sensoren repräsentiert. Diese Gruppen registrieren ankommende Wasserwellen, deren Stärke davon abhängt, wie direkt sie zur Wellenquelle ausgerichtet sind und von der Frequenz der Wellen. Ihre Ausgaben fließen in ein „Winner-take-all“-Netzwerk – einen Ring neuronaler Populationen, die sich gegenseitig erregen und hemmen, bis nur noch eine kleine Region stark aktiv ist. Diese aktive Region zeigt in eine bestimmte Richtung, der der simulierte Egel sich zuwendet, bevor er vorwärts schwimmt. Indem dieser Wahrnehmen–Entscheiden–Bewegen-Zyklus wiederholt wird, versucht der Agent, die Quelle der Wellen zu erreichen.
Die richtige Frequenz in den Wellen finden
Als das Team die Frequenz der Wasserwellen und die Empfindlichkeitsschwelle des neuronalen Netzwerks variierte, ähnelte das Verhalten des Agenten stark dem von echten Blutegeln, die in einem Becken getestet wurden. Sehr niederfrequente Wellen kitzelten die Sensoren kaum, sodass der Agent fast geradeaus wanderte und selten das Ziel fand. Sehr hochfrequente Wellen überstimulierten viele Sensoren gleichzeitig, wodurch der Agent in zufällige Richtungen drehte und ebenfalls das Ziel verpasste. Zwischen diesen Extremen gab es eine optimale Zone: bei Wellenfrequenzen um 8–12 Zyklen pro Sekunde und passender neuronaler Empfindlichkeit wurde nur eine kleine Gruppe neuronaler Populationen stark aktiv, und der Agent steuerte zuverlässig auf die Quelle zu. Dies ist derselbe Frequenzbereich, in dem lebende Blutegel in Experimenten am besten abschneiden, was darauf hindeutet, dass das vereinfachte Modell wichtige Merkmale ihrer Wahrnehmungsstrategie erfasst.
Was passiert, wenn Sensoren ausfallen?
Das Modell ermöglichte einfache „virtuelle Operationen“, indem ausgewählte Sensorgruppen abgeschaltet wurden. Das Entfernen von Sensoren auf einer ganzen Körperseite führte bei allen getesteten Frequenzen zu schlechtem Abschneiden, was impliziert, dass der Vergleich von links und rechts für die Navigation entscheidend ist. Andere Muster hatten subtilere Effekte. So schadeten etwa das Abschalten nur vorderer Sensoren bei typischer Frequenz kaum der Leistung, obwohl die Bahnen stärker gekrümmt zum Ziel führten. Überraschenderweise schnitt der Agent bei manchen Anordnungen, bei denen vordere oder vordere und hintere Sensoren deaktiviert waren, tatsächlich besser ab – allerdings bei geringfügig höheren Wellenfrequenzen. Diese Ergebnisse deuten darauf hin, dass Änderungen in Anzahl und Platzierung der Sensoren den besten Frequenzbereich verschieben können, ohne die Navigation zwangsläufig zu verschlechtern, ein Muster, das dem ähnelt, wie sich die Empfindlichkeit echter Blutegel mit ihrem Wachstum verändert.
Wenn mehr Sensoren verrauschte Daten übertrumpfen
Die Forscher fragten auch, wie gut der Agent mit verrauschten, unzuverlässigen Sensoren zurechtkommt, indem sie den eingehenden Signalen zufällige Fehler hinzufügten. Bei „hochwertigen“ Sensoren war die Leistung ähnlich, egal ob der Agent 8, 24 oder 72 Sensorgruppen hatte. Wenn die Sensorqualität jedoch verschlechtert wurde, half eine größere Anzahl von Sensoren: Mit 72 verrauschten Sensoren gelang dem Agenten viel häufiger Erfolg als mit nur 8, weil die korrekten Signale aus vielen Richtungen dazu neigten, die fehlerhaften zu überwiegen. Das legt einen Grund nahe, warum echte Blutegel so viele einfache Sensoren tragen könnten: Redundanz erlaubt es ihnen, Umweltstörungen und Schäden herauszufiltern und dennoch nützliche Störungen zu orten.
Von teichbewohnenden Würmern zu künftigen Maschinen
Insgesamt zeigt die Studie, dass ein vergleichsweise einfaches Schema für Wahrnehmung und Entscheidungsfindung vieles von der Fähigkeit echter Blutegel reproduzieren kann, die Quelle von Wasserwellen zu lokalisieren. Durch Anpassung der Sensitivität des neuronalen Netzwerks sowie der Anzahl und der Platzierung von Sensoren sagt das Modell voraus, wann Navigation gelingen oder scheitern wird. Für die breite Leserschaft lautet die Hauptaussage: Die Natur löst oft komplexe Aufgaben – wie das Steuern durch eine laute, sich verändernde Welt – nicht mit perfekten Sensoren oder hoher Rechenleistung, sondern mit vielen bescheidenen Detektoren und einer robusten Methode, das stärkste Muster „gewinnen“ zu lassen. Dieselbe Idee könnte das Design künftiger Unterwasserroboter, medizinischer Geräte oder Strukturüberwachungen leiten, die weiterarbeiten müssen, auch wenn einige ihrer Sensoren verrauscht sind oder ausfallen.
Zitation: Gill, J.P., Nichols, S.T., Motevalian, M. et al. Bioinspired navigation based on distributed mechanoreception in the leech. npj Robot 4, 24 (2026). https://doi.org/10.1038/s44182-026-00082-3
Schlüsselwörter: Blutegele Navigation, verteilte Sensorik, Mechanorezeption, Winner-take-all-Netzwerk, bioinspirierte Robotik