Clear Sky Science · pl
Nawigacja inspirowana naturą oparta na rozproszonej mechanorecepcji u pijawki
Jak prosty robak uczy mądrzejszego zmysłowania
Zwierzeta wodne często znajdują pożywienie i unikają zagrożeń, wyczuwając fale na powierzchni wody. Badanie to pokazuje, jak skromna pijawka, pokryta drobnymi czujnikami dotyku, może zainspirować nowe sposoby nawigacji dla robotów i innych maszyn, polegające na wielu prostych detektorach zamiast kilku drogich sensorów. Tworząc model komputerowy łączący sygnały z czujników rozmieszczonych po całym ciele pijawki, autorzy badają, jak zwierzę utrzymuje kurs, nawet gdy część czujników jest zaszumiona, uszkodzona lub brakująca — oraz jak inżynierowie mogliby zapożyczyć te same sztuczki.
Ciało pokryte małymi „uszami”
Pijawki są idealnym modelem do badania zagadnienia „wiele działa jako jedno”. Ich ciała pokryte są prawie 300 małymi narządami czuciowymi, które wykrywają ruch wody, światło i związki chemiczne. Dzięki tej rozproszonej sieci pijawka potrafi wychwycić fale wywołane przez pływającą ofiarę i skierować się ku źródłu. Biolodzy wciąż jednak nie wiedzą dokładnie, jak wszystkie te indywidualne sygnały są łączone w układzie nerwowym, aby sterować ruchem zwierzęcia, ani jak zmieniłoby się jego zachowanie, gdyby całe fragmenty czujników przestały działać. Przeprowadzenie takich szczegółowych eksperymentów na żywych zwierzętach jest niezwykle trudne, dlatego autorzy sięgnęli po uproszczoną, cyfrową pijawkę.
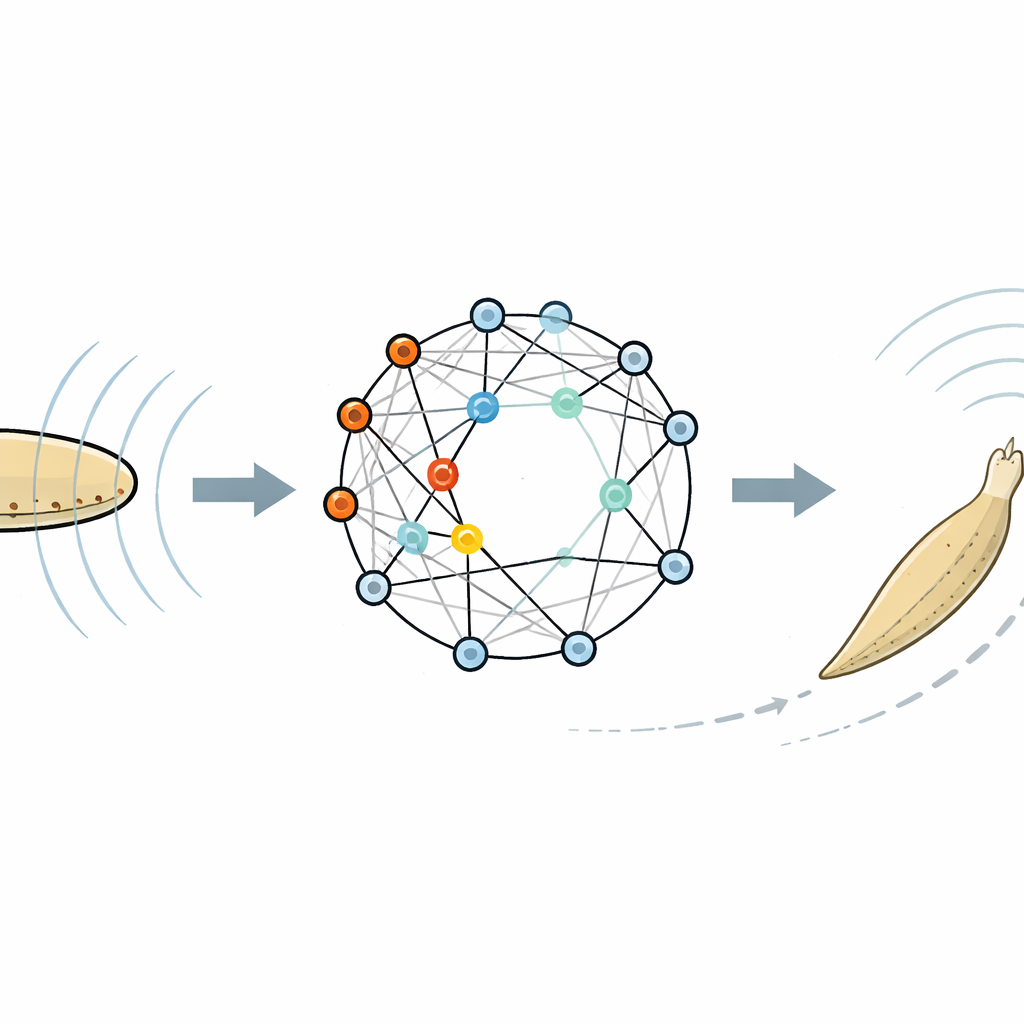
Budowa cyfrowej pijawki
W modelu komputerowym elastyczne ciało pijawki zastąpiono sztywną osią owalną z zaledwie 24 grupami czujników rozmieszczonymi równomiernie wokół niej, z których każda reprezentuje wiele prawdziwych receptorów. Grupy te wyczuwają nadchodzące fale wodne, których siła zależy od tego, jak bezpośrednio są skierowane w stronę źródła oraz od częstotliwości fali. Ich sygnały trafiają do sieci „winner-take-all” — pierścienia populacji neuronów, które wzajemnie się pobudzają i hamują, aż tylko niewielki region stanie się silnie aktywny. Ten aktywny obszar wskazuje określony kierunek, w stronę którego symulowana pijawka się obraca, po czym płynie naprzód. Powtarzając ten cykl: wykryj–zdecyduj–ruch, agent stara się dotrzeć do źródła fal.
Znajdowanie optymalnego miejsca w falach
Gdy zespół zmieniał częstotliwość fal wodnych i próg czułości sieci neuronowej, zachowanie agenta było zbliżone do zachowań prawdziwych pijawek testowanych w zbiorniku. Fale o bardzo niskiej częstotliwości ledwie poruszały czujniki, więc agent płynął niemal prosto i rzadko trafiał w cel. Fale o bardzo wysokiej częstotliwości nadmiernie pobudzały wiele czujników jednocześnie, powodując, że agent kręcił się losowo i również chybił celu. Pomiędzy tymi skrajnościami istniało „słodkie miejsce”: przy częstotliwościach około 8–12 cykli na sekundę i odpowiedniej czułości neuronów tylko niewielka grupa populacji neuronowych stawała się silnie aktywna, a agent niezawodnie kierował się ku źródłu. To ten sam zakres częstotliwości, w którym żywe pijawki najlepiej radzą sobie w eksperymentach, co sugeruje, że uproszczony model oddaje kluczowe cechy ich strategii sensorycznej.
Co się dzieje, gdy czujniki zawodzą?
Model ułatwił przeprowadzenie „wirtualnej operacji” przez wyłączanie wybranych grup czujników. Usunięcie czujników z całej jednej strony ciała prowadziło do słabej wydajności przy wszystkich testowanych częstotliwościach, co sugeruje, że porównywanie sygnałów z lewej i prawej strony jest kluczowe dla nawigacji. Inne wzorce dały subtelniejsze efekty. Na przykład wyłączenie jedynie przednich czujników niewiele szkodziło wydajności przy typowej częstotliwości, choć trasy zakrzywiały się łagodniej w kierunku celu. Co zaskakujące, w niektórych układach, gdzie usunięto przednie lub przednie i tylne czujniki, agent radził sobie nawet lepiej — ale przy nieco wyższych częstotliwościach fal. Wyniki te sugerują, że zmiana liczby i rozmieszczenia czujników może przesunąć optymalny zakres częstotliwości, niekoniecznie pogarszając nawigację, co odpowiada temu, jak czułość prawdziwych pijawek zmienia się w miarę ich wzrostu.
Gdy więcej czujników przewyższa zaszumione dane
Naukowcy sprawdzili też, jak agent radzi sobie z zaszumionymi, zawodnymi czujnikami, dodając losowe błędy do napływających sygnałów. Przy „wysokiej jakości” czujnikach wydajność była podobna niezależnie od tego, czy agent miał 8, 24 czy 72 grupy czujników. Jednak gdy jakość czujników pogarszała się, dodanie większej liczby czujników pomagało: przy 72 zaszumionych czujnikach agent nadal radził sobie znacznie częściej niż przy zaledwie 8, ponieważ prawidłowe sygnały z wielu kierunków przeważały nad złymi. To sugeruje jedną z przyczyn, dla których prawdziwe pijawki mogą mieć tak wiele prostych receptorów: redundancja pozwala filtrować zakłócenia środowiskowe i uszkodzenia, nadal umożliwiając namierzanie użytecznych zaburzeń.
Od żyjących w stawie robaków do przyszłych maszyn
Podsumowując, badanie pokazuje, że stosunkowo prosty schemat wykrywania i podejmowania decyzji potrafi odtworzyć dużą część zdolności prawdziwej pijawki do lokalizowania źródła fal wodnych. Poprzez regulację czułości sieci neuronowej oraz zmianę liczby czujników i ich rozmieszczenia, model przewiduje, kiedy nawigacja powiedzie się, a kiedy zawiedzie. Dla czytelnika niebędącego specjalistą główna teza jest taka, że natura często rozwiązuje złożone zadania — jak poruszanie się w zaszumionym, zmiennym świecie — nie dzięki perfekcyjnym sensorom czy ciężkim obliczeniom, lecz wielu skromnym detektorom i odpornej metodzie pozwalającej na zwycięstwo najsilniejszego wzorca. Ten sam pomysł może inspirować przyszłe projekty robotów podwodnych, urządzeń medycznych czy monitorów konstrukcji, które muszą działać nawet wtedy, gdy część ich czujników staje się zaszumiona lub przestaje działać.
Cytowanie: Gill, J.P., Nichols, S.T., Motevalian, M. et al. Bioinspired navigation based on distributed mechanoreception in the leech. npj Robot 4, 24 (2026). https://doi.org/10.1038/s44182-026-00082-3
Słowa kluczowe: nawigacja pijawek, rozproszone czujniki, mechanorecepcja, sieć winner-take-all, robotyka inspirowana biologią