Clear Sky Science · en
Bioinspired navigation based on distributed mechanoreception in the leech
How a Simple Worm Can Teach Smarter Sensing
Aquatic animals often find food and avoid danger by feeling ripples in the water. This study shows how the humble leech, covered in tiny touch sensors, can inspire new ways for robots and other machines to navigate using many simple detectors instead of a few expensive ones. By building a computer model of how a leech might combine signals from sensors all over its body, the authors explore how animals stay on course even when some sensors are noisy, damaged, or missing—and how engineers might borrow the same tricks.
A Body Covered in Tiny Ears
Leeches are ideal test beds for this question of “many working as one.” Their bodies bristle with nearly 300 small sensing organs that can feel water motion, light, and chemicals. With this distributed network, a leech can detect ripples made by a swimming prey animal and then home in on the source. Yet biologists still do not know exactly how all these individual signals are combined in the nervous system to steer the animal, or how its behavior would change if whole patches of sensors stopped working. Doing such detailed experiments on live animals is extremely difficult, so the authors turned to a simplified digital leech.
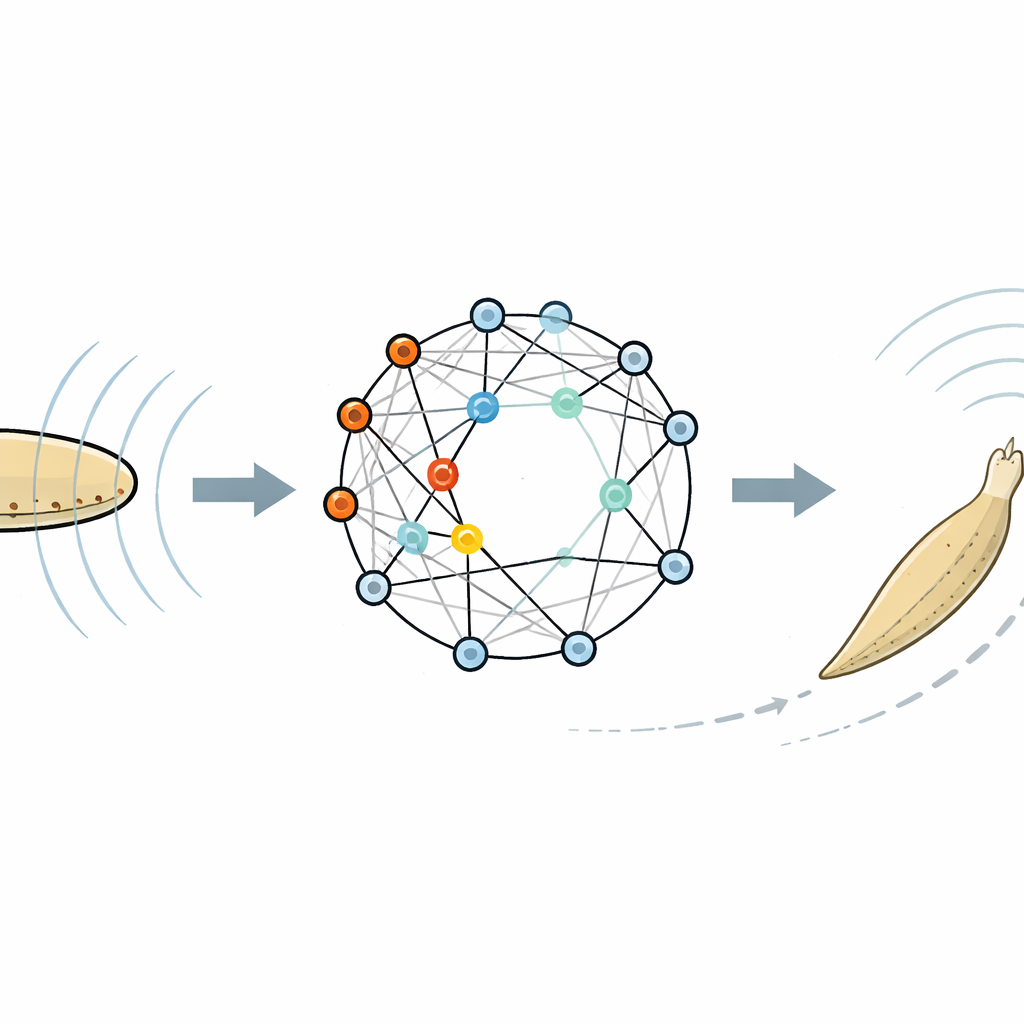
Building a Digital Leech
In the computer model, the leech’s flexible body is replaced by a rigid oval with just 24 sensor groups spaced evenly around it, each one standing in for many real sensors. These groups feel incoming water waves whose strength depends on how directly they face the wave source and on the wave’s frequency. Their outputs feed into a “winner-take-all” network—a ring of neural populations that excite and inhibit one another until only a small region becomes strongly active. That active region points in a particular direction, which the simulated leech then turns toward before swimming forward. By repeating this sense–decide–move loop, the agent tries to reach the source of the waves.
Finding the Sweet Spot in the Ripples
When the team varied the frequency of the water waves and the sensitivity threshold of the neural network, the agent’s behavior closely matched that of real leeches tested in a tank. Very low-frequency waves barely tickled the sensors, so the agent wandered almost straight ahead and rarely found the target. Very high-frequency waves overstimulated many sensors at once, causing the agent to spin in random directions and again miss the goal. Between these extremes, there was a sweet spot: with wave frequencies around 8–12 cycles per second and appropriate neural sensitivity, only a small cluster of neural populations became strongly active, and the agent reliably steered toward the source. This is the same frequency range where live leeches perform best in experiments, suggesting that the simplified model captures key features of their sensing strategy.
What Happens When Sensors Fail?
The model made it easy to perform “virtual surgery” by turning off selected groups of sensors. Removing sensors from an entire side of the body led to poor performance at all tested frequencies, implying that comparing left and right input is crucial for navigation. Other patterns produced more subtle effects. For example, disabling only front sensors hardly hurt performance at a typical frequency, though the paths curved more gradually toward the target. Surprisingly, in some layouts where front or front-and-rear sensors were removed, the agent actually performed better—but at slightly higher wave frequencies. These results hint that changing the number and placement of sensors may shift the best frequency range without necessarily making navigation worse, a pattern that echoes how real leeches’ sensitivity changes as they grow.
When More Sensors Beat Noisy Data
The researchers also asked how well the agent could cope with noisy, unreliable sensors by adding random errors to the incoming signals. With “high-quality” sensors, performance was similar whether the agent had 8, 24, or 72 sensor groups. But when sensor quality was degraded, adding more sensors helped: with 72 noisy sensors, the agent could still succeed much more often than with only 8, because the correct signals from many directions tended to outweigh the bad ones. This suggests one reason real leeches might carry so many simple sensors: redundancy allows them to filter out environmental clutter and damage while still homing in on useful disturbances.
From Pond-Dwelling Worms to Future Machines
Overall, the study shows that a relatively simple sensing and decision-making scheme can reproduce much of the real leech’s ability to locate the source of water ripples. By adjusting how sensitive the neural network is, and by changing how many sensors are available and where they are placed, the model predicts when navigation will succeed or fail. For a lay reader, the main takeaway is that nature often solves complex tasks—like steering through a noisy, changing world—not with perfect sensors or heavy computation, but with many modest detectors and a robust way of letting the strongest pattern “win.” This same idea could guide future designs for underwater robots, medical devices, or structural monitors that must keep working even when some of their sensors become noisy or fail.
Citation: Gill, J.P., Nichols, S.T., Motevalian, M. et al. Bioinspired navigation based on distributed mechanoreception in the leech. npj Robot 4, 24 (2026). https://doi.org/10.1038/s44182-026-00082-3
Keywords: leech navigation, distributed sensing, mechanoreception, winner-take-all network, bioinspired robotics