Clear Sky Science · pt
Navegação bioinspirada baseada em mecanorrecepção distribuída na sanguessuga
Como um verme simples pode ensinar sensores mais inteligentes
Animais aquáticos frequentemente encontram comida e evitam perigo sentindo as ondulações na água. Este estudo mostra como a humilde sanguessuga, coberta por minúsculos sensores táteis, pode inspirar novas formas de robôs e outras máquinas navegarem usando muitos detectores simples em vez de poucos caros. Ao construir um modelo computacional de como uma sanguessuga poderia combinar sinais de sensores por todo o corpo, os autores exploram como os animais se mantêm no rumo mesmo quando alguns sensores estão ruidosos, danificados ou faltando — e como engenheiros podem emprestar essas mesmas estratégias.
Um corpo coberto por pequenas orelhas
Sanguessugas são plataformas de teste ideais para essa questão do “muitos agindo como um só”. Seus corpos estão cobertos por quase 300 pequenos órgãos sensoriais que percebem o movimento da água, luz e substâncias químicas. Com essa rede distribuída, uma sanguessuga pode detectar ondulações geradas por uma presa nadando e então orientar-se em direção à fonte. Ainda assim, biólogos não sabem exatamente como todos esses sinais individuais são combinados no sistema nervoso para guiar o animal, ou como seu comportamento mudaria se regiões inteiras de sensores deixassem de funcionar. Fazer experimentos tão detalhados em animais vivos é extremamente difícil, então os autores recorreram a uma sanguessuga digital simplificada.
Construindo uma sanguessuga digital
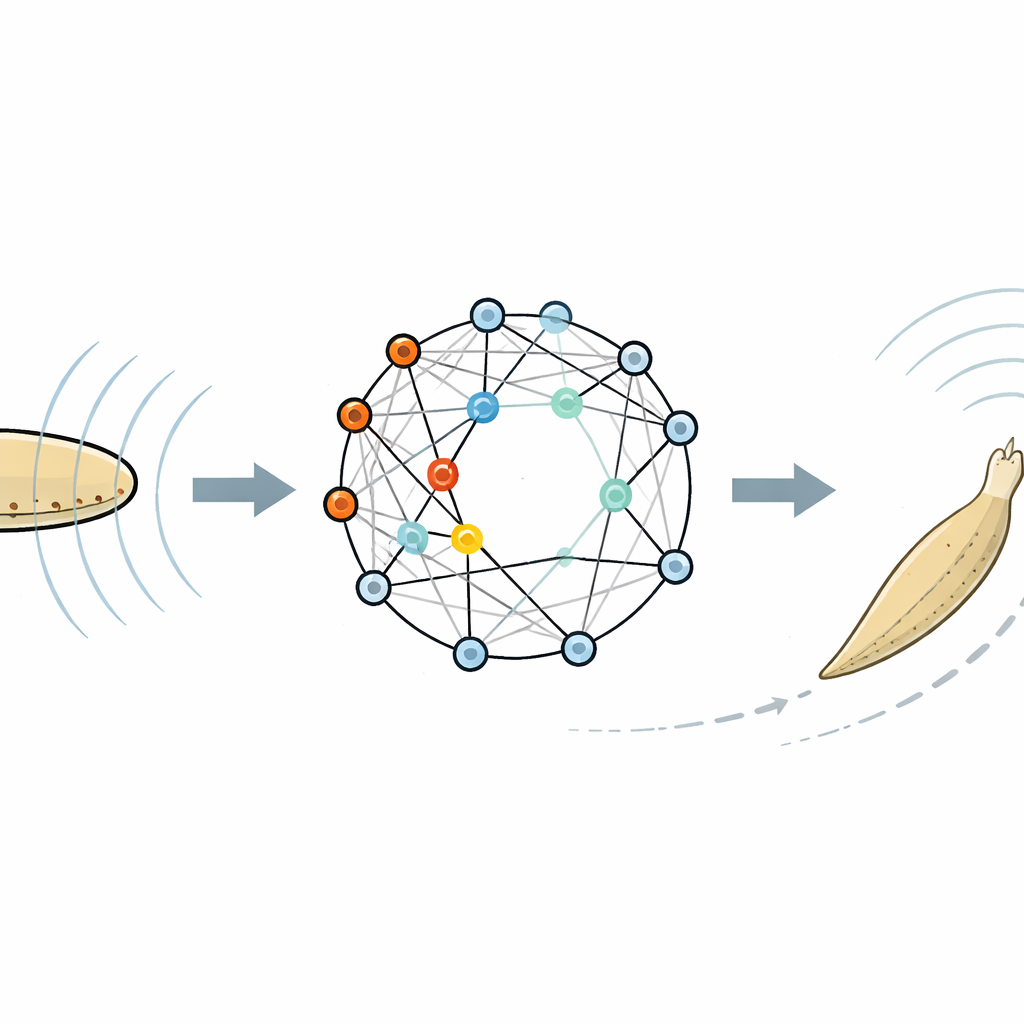
No modelo computacional, o corpo flexível da sanguessuga é substituído por um oval rígido com apenas 24 grupos de sensores espaçados uniformemente ao redor, cada um representando muitos sensores reais. Esses grupos sentem ondas de água cujo vigor depende de quão diretamente enfrentam a fonte da onda e da frequência da onda. Suas saídas alimentam uma rede “vencedor-leva-tudo” — um anel de populações neurais que se excitam e se inibem até que apenas uma pequena região fique fortemente ativa. Essa região ativa aponta numa direção particular, que a sanguessuga simulada então vira antes de nadar para frente. Repetindo esse ciclo sentir–decidir–mover, o agente tenta alcançar a fonte das ondas.
Encontrando o ponto ideal nas ondulações
Quando a equipe variou a frequência das ondas de água e o limiar de sensibilidade da rede neural, o comportamento do agente coincidiu de perto com o de sanguessugas reais testadas em um tanque. Ondas de frequência muito baixa praticamente não estimulavam os sensores, de modo que o agente vagava quase em linha reta e raramente encontrava o alvo. Ondas de frequência muito alta superestimulavam muitos sensores ao mesmo tempo, fazendo o agente girar em direções aleatórias e novamente perder o objetivo. Entre esses extremos havia um ponto ideal: com frequências de onda em torno de 8–12 ciclos por segundo e sensibilidade neural adequada, apenas um pequeno grupo de populações neurais tornava-se fortemente ativo, e o agente dirigia-se de forma confiável para a fonte. Essa é a mesma faixa de frequência em que sanguessugas vivas apresentam melhor desempenho em experimentos, sugerindo que o modelo simplificado captura características-chave da estratégia sensorial delas.
O que acontece quando sensores falham?
O modelo facilitou realizar “cirurgias virtuais” desligando grupos selecionados de sensores. Remover sensores de um lado inteiro do corpo levou a um desempenho ruim em todas as frequências testadas, o que indica que comparar entradas esquerda e direita é crucial para a navegação. Outros padrões produziram efeitos mais sutis. Por exemplo, desativar apenas sensores frontais prejudicou pouco o desempenho em uma frequência típica, embora as trajetórias curvassem mais gradualmente em direção ao alvo. Surpreendentemente, em alguns arranjos onde sensores frontais ou frontais e traseiros foram removidos, o agente de fato teve desempenho melhor — mas em frequências de onda ligeiramente mais altas. Esses resultados sugerem que mudar o número e a posição dos sensores pode deslocar a faixa de frequência ideal sem necessariamente piorar a navegação, um padrão que ecoa como a sensibilidade das sanguessugas reais muda à medida que crescem.
Quando mais sensores superam dados ruidosos
Os pesquisadores também investigaram quão bem o agente lidava com sensores ruidosos e pouco confiáveis, adicionando erros aleatórios aos sinais recebidos. Com sensores de “alta qualidade”, o desempenho foi semelhante quer o agente tivesse 8, 24 ou 72 grupos de sensores. Mas quando a qualidade dos sensores foi degradada, adicionar mais sensores ajudou: com 72 sensores ruidosos, o agente ainda conseguia ser bem-sucedido muito mais frequentemente do que com apenas 8, porque os sinais corretos vindos de muitas direções tendiam a sobrepujar os errados. Isso sugere uma razão pela qual sanguessugas reais podem carregar tantos sensores simples: a redundância lhes permite filtrar ruído ambiental e danos enquanto ainda se orientam por perturbações úteis.
De vermes de lagoa a máquinas do futuro
No conjunto, o estudo mostra que um esquema relativamente simples de sensoriamento e tomada de decisão pode reproduzir grande parte da capacidade real da sanguessuga de localizar a fonte de ondulações na água. Ajustando quão sensível é a rede neural, e mudando quantos sensores estão disponíveis e onde são colocados, o modelo prevê quando a navegação terá sucesso ou falhará. Para um leitor leigo, a principal conclusão é que a natureza frequentemente resolve tarefas complexas — como orientar-se num mundo barulhento e em mudança — não com sensores perfeitos ou computação pesada, mas com muitos detectores modestos e um modo robusto de deixar o padrão mais forte “vencer”. Essa mesma ideia pode orientar designs futuros para robôs subaquáticos, dispositivos médicos ou monitores estruturais que devem continuar funcionando mesmo quando alguns de seus sensores ficam ruidosos ou falham.
Citação: Gill, J.P., Nichols, S.T., Motevalian, M. et al. Bioinspired navigation based on distributed mechanoreception in the leech. npj Robot 4, 24 (2026). https://doi.org/10.1038/s44182-026-00082-3
Palavras-chave: navegação de sanguessuga, sensoriamento distribuído, mecanorrecepção, rede vencedor-leva-tudo, robótica bioinspirada