Clear Sky Science · ru
Биовдохновлённая навигация на основе распределённой механорецепции у пиявки
Как простой червь учит умнее чувствовать
Водные животные часто находят пищу и избегают опасности, ощущая рябь на поверхности воды. В этом исследовании показано, как скромная пиявка, покрытая крошечными сенсорами прикосновения, может вдохновить новые способы навигации для роботов и других машин — с использованием множества простых детекторов вместо нескольких дорогих. Создав компьютерную модель того, как пиявка может объединять сигналы от сенсоров по всему телу, авторы исследуют, как животные сохраняют курс, даже когда некоторые датчики шумят, повреждены или отсутствуют, — и какие приёмы инженеры могут заимствовать.
Тело, усыпанное крошечными «ушами»
Пиявки — идеальные объекты для изучения явления «многие действуют как один». Их тела усеяны почти 300 маленькими органами чувств, которые реагируют на движение воды, свет и химические вещества. Благодаря этой распределённой сети пиявка может обнаружить рябь, создаваемую плавающей добычей, и навести на источник. Биологи до сих пор точно не знают, как все эти отдельные сигналы комбинируются в нервной системе, чтобы направлять животное, или как изменится поведение, если целые участки сенсоров перестанут работать. Проводить такие детальные эксперименты на живых животных крайне сложно, поэтому авторы обратились к упрощённой цифровой пиявке.
Создание цифровой пиявки
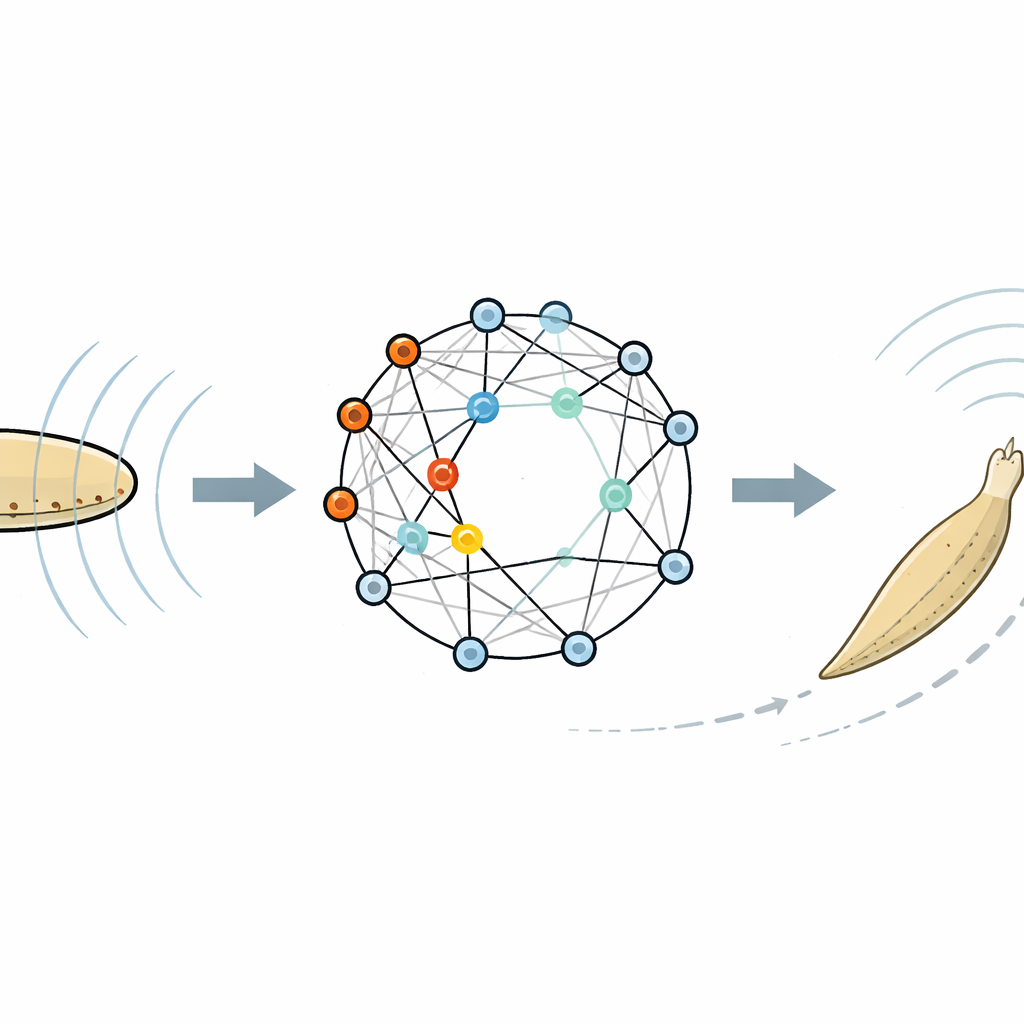
В компьютерной модели гибкое тело пиявки заменено на твёрдый овал с 24 группами сенсоров, равномерно расположенными вокруг него, каждая из которых представляет собой множество реальных датчиков. Эти группы реагируют на приходящие водяные волны: сила сигнала зависит от того, насколько прямо они обращены к источнику волны, и от частоты волны. Их выходы поступают в сеть «победитель забирает всё» — кольцо нейронных популяций, которые возбуждают и тормозят друг друга до тех пор, пока не активируется лишь небольшая зона. Активная область указывает в определённом направлении, к которому затем поворачивается смоделированная пиявка, прежде чем поплыть вперёд. Повторяя этот цикл «ощупывание — решение — движение», агент пытается достичь источника волн.
Нахождение оптимума в рябях
Когда команда варьировала частоту водяных волн и порог чувствительности нейронной сети, поведение агента тесно соответствовало поведению реальных пиявок, испытанных в резервуаре. Очень низкочастотные волны едва касались сенсоров, поэтому агент почти прямо плыл и редко находил цель. Очень высокочастотные волны одновременно чрезмерно возбуждали многие сенсоры, заставляя агента крутиться в случайных направлениях и снова промахиваться. Между этими крайностями оказался оптимум: при частотах волн около 8–12 циклов в секунду и соответствующей чувствительности нейронной сети активировалась лишь небольшая группа нейронных популяций, и агент надёжно направлялся к источнику. Это та же частотная область, в которой живые пиявки показывают лучшие результаты в экспериментах, что свидетельствует о том, что упрощённая модель отражает ключевые черты их стратегии чувствования.
Что происходит, когда сенсоры выходят из строя?
Модель упростила проведение «виртуальной хирургии» — отключение выбранных групп сенсоров. Удаление сенсоров с одной стороны тела приводило к плохой эффективности при всех протестированных частотах, что означает: сравнение входов слева и справа критично для навигации. Другие схемы давали более тонкие эффекты. Например, отключение только передних сенсоров почти не ухудшало работу при типичной частоте, хотя траектории становились более плавно изогнутыми к цели. Удивительно, что в некоторых конфигурациях, где были удалены передние или передние и задние сенсоры, агент вовсе показал улучшение — но при немного более высоких частотах волн. Эти результаты намекают, что изменение числа и расположения сенсоров может сдвигать оптимальную частотную область без неизбежного ухудшения навигации, что отчасти повторяет, как чувствительность реальных пиявок меняется по мере их роста.
Когда множество сенсоров лучше при шумных данных
Исследователи также проверили, насколько агент справляется с шумными, ненадёжными сенсорами, добавив случайные ошибки в принимаемые сигналы. При «высококачественных» сенсорах производительность была схожей для 8, 24 или 72 групп сенсоров. Но когда качество сенсоров ухудшалось, добавление большего числа сенсоров помогало: с 72 шумными сенсорами агент по-прежнему чаще добивался успеха, чем при всего 8, поскольку правильные сигналы с многочисленных направлений, как правило, перевешивали ошибочные. Это даёт одно из объяснений, почему у реальных пиявок может быть так много простых сенсоров: избыточность позволяет фильтровать помехи и повреждения окружающей среды, продолжая наводиться на полезные возмущения.
От прудовых червей к будущим машинам
В целом исследование показывает, что относительно простая схема ощущений и принятия решений способна воспроизвести большую часть умения реальной пиявки локализовать источник водяной ряби. Регулируя чувствительность нейронной сети и изменяя количество сенсоров и их расположение, модель предсказывает, когда навигация будет успешной, а когда — нет. Для непрофессионального читателя главный вывод таков: природа часто решает сложные задачи — например, ориентироваться в шумном, меняющемся мире — не с помощью идеальных сенсоров или тяжёлых вычислений, а при помощи множества скромных детекторов и надёжного механизма, позволяющего самой сильной схеме «выиграть». Эта же идея может направлять будущие проекты подводных роботов, медицинских приборов или систем мониторинга конструкций, которые должны продолжать работать, даже если часть их сенсоров шумит или выходит из строя.
Цитирование: Gill, J.P., Nichols, S.T., Motevalian, M. et al. Bioinspired navigation based on distributed mechanoreception in the leech. npj Robot 4, 24 (2026). https://doi.org/10.1038/s44182-026-00082-3
Ключевые слова: навигация пиявки, распределённое сенсорное восприятие, механорецепция, сеть «победитель забирает всё», биовдохновлённая робототехника