Clear Sky Science · ja
ヒルの分散機械受容に基づく生体模倣ナビゲーション
単純な虫がより賢い感覚を教えてくれる方法
水生動物はしばしば水面のさざ波を感じて餌を見つけたり危険を避けたりします。本研究は、微小な触覚センサーに覆われたありふれたヒルが、少数の高性能センサーではなく多数の単純な検出器を使ってロボットや他の機械が航行する新しい手法をどのように示唆するかを示します。ヒルが全身のセンサーからの信号をどのように統合するかの計算モデルを構築することで、著者らは一部のセンサーがノイズを帯びたり損傷したり欠落したりしても動物が進路を保てる仕組み、そして技術者が同じ手法をどのように取り入れ得るかを探っています。
小さな耳で覆われた体
ヒルは「多数が一体となる」という問いの理想的な試験台です。彼らの体には水流、光、化学物質を感知する約300個に近い小さな感覚器が並んでいます。この分散したネットワークにより、ヒルは泳ぐ獲物が作るさざ波を検出し、その発生源に向かって接近できます。しかし、生物学者はこれら多数の個々の信号が神経系でどのように組み合わされて動物の舵取りに使われているか、あるいは特定のセンサー群が機能しなくなった場合に行動がどう変化するかを正確には把握していません。生体個体でそのような詳細な実験を行うのは極めて困難なため、著者らは単純化したデジタルヒルに頼りました。
デジタルヒルの構築
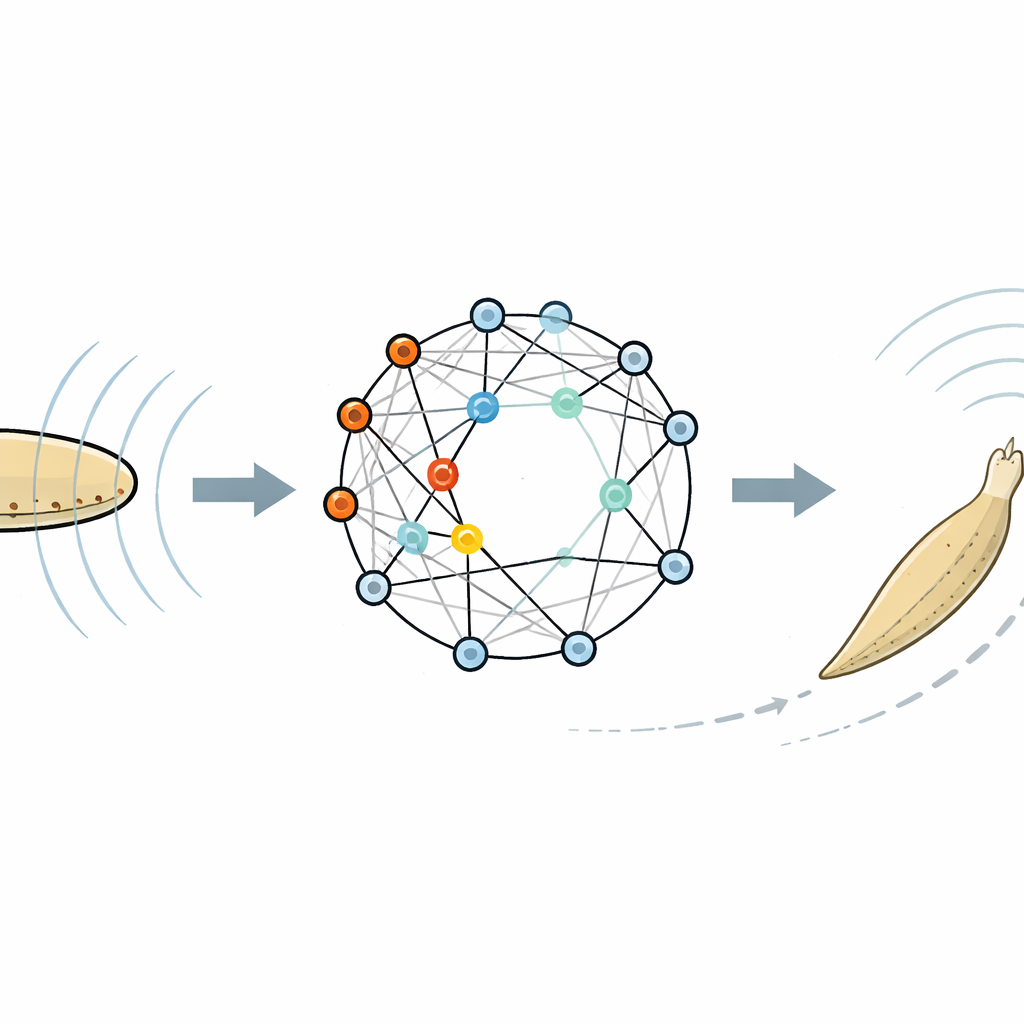
計算モデルでは、柔軟な体は剛体の楕円体に置き換えられ、等間隔に配置された24のセンサー群だけが残されます。各群は多数の実際のセンサーを代表します。これらの群は、波源にどれだけ直接向いているかや波の周波数に応じて強さが変わる入射水波を感知します。出力は「ウィナー・テイク・オール」ネットワークに入力されます—互いに興奮と抑制を行う神経集団のリングで、最終的に小さな領域だけが強く活性化します。その活性化領域が特定の方向を指し、シミュレートされたヒルはその方向に向きを変えてから前進します。この感知→判断→移動のループを繰り返すことで、エージェントは波源に到達しようと試みます。
さざ波における最適点を見つける
チームが水波の周波数と神経ネットワークの感度閾値を変化させると、エージェントの挙動は水槽内で試験された実際のヒルのそれと密接に一致しました。非常に低周波の波はセンサーをほとんど刺激しないため、エージェントはほぼ直進して標的を見つけられないことが多くなりました。非常に高周波の波は多くのセンサーを一度に過剰刺激し、エージェントはランダムに回転して再び目標を外しました。これらの極端の間にスイートスポットがあり、周波数がおよそ8–12サイクル毎秒で神経の感度が適切であるとき、わずかな神経集団のクラスターだけが強く活性化し、エージェントは確実に波源に向かって舵を取りました。これは生体ヒルが実験で最も良く働く同じ周波数帯域であり、単純化モデルが彼らの感知戦略の主要な特徴を捉えていること示唆します。
センサーが故障したらどうなるか?
モデルでは特定のセンサー群をオフにする「仮想手術」が容易に行えました。体の片側全体からセンサーを取り除くと、試験したすべての周波数で性能が悪化し、左右の入力を比較することがナビゲーションにとって重要であることが示唆されました。その他の配置ではより微妙な影響が出ました。例えば、前方のみのセンサーを無効にしても典型的な周波数では性能はほとんど損なわれず、ただし目標へ向かう経路がよりゆるやかに曲がるようになりました。驚くべきことに、前方または前方と後方のセンサーが取り除かれた一部の配置では、エージェントはわずかに高い周波数で実際に性能が良くなる場合もありました。これらの結果は、センサーの数や配置を変えることで最適な周波数帯域がずれることがあり、必ずしもナビゲーションが悪化するわけではない—という傾向を示唆しており、ヒルが成長するにつれて感度が変化する様子と一致しています。
多くのセンサーがノイズに勝つとき
研究者らはまた、受信信号にランダムな誤差を加えてノイズの多い信頼性の低いセンサーにエージェントがどの程度対処できるかを問いました。「高品質」なセンサーの場合、エージェントが8、24、72のセンサー群を持っているかどうかで性能はほぼ変わりませんでした。しかしセンサー品質が劣化すると、センサー数を増やすことが有利になりました:72個のノイズの多いセンサーを持つ場合、8個しかない場合に比べて正しく成功する頻度がかなり高くなりました。これは、多数の方向からの正しい信号が誤った信号を打ち消す傾向があるためです。こうした冗長性が、実際のヒルが多数の単純なセンサーを持つ一因である可能性があり、環境雑音や損傷をフィルタリングしつつ有用な摂動に向かって移動できることを示唆します。
池に住む虫から未来の機械へ
総じて、本研究は比較的単純な感覚と意思決定の仕組みが水のさざ波の源を特定する生体ヒルの能力の多くを再現できることを示しています。神経ネットワークの感度を調整し、利用可能なセンサーの数や配置を変えることで、モデルはいつナビゲーションが成功し、いつ失敗するかを予測します。一般読者への主要な教訓は、自然はしばしば複雑な課題―ノイズが多く変化する世界での舵取りのようなもの―を、完璧なセンサーや大規模な計算ではなく、多数の控えめな検出器と最も強いパターンが“勝つ”堅牢な方式で解いているということです。同じ考えは、将来の水中ロボット、医療機器、あるいは一部のセンサーがノイズを帯びたり故障したりしても動作を続けねばならない構造モニターの設計を導く可能性があります。
引用: Gill, J.P., Nichols, S.T., Motevalian, M. et al. Bioinspired navigation based on distributed mechanoreception in the leech. npj Robot 4, 24 (2026). https://doi.org/10.1038/s44182-026-00082-3
キーワード: ヒルのナビゲーション, 分散センシング, 機械受容, ウィナー・テイク・オール ネットワーク, 生体模倣ロボティクス