Clear Sky Science · sv
Bioinspirerad navigation baserad på distribuerad mekanoreception hos igeln
Hur en enkel mask kan lära oss smartare avkänning
Vattenlevande djur hittar ofta föda och undviker fara genom att känna av krusningar i vattnet. Denna studie visar hur den anspråkslösa igeln, täckt av små beröringssensorer, kan inspirera nya sätt för robotar och andra maskiner att navigera genom att använda många enkla detektorer i stället för några få dyra. Genom att bygga en datorlik modell av hur en igel kan kombinera signaler från sensorer över hela kroppen undersöker författarna hur djur håller kursen även när vissa sensorer är brusiga, skadade eller saknas — och hur ingenjörer kan låna samma knep.
En kropp täckt av små öron
Iglar är idealiska testobjekt för frågan om ”många som fungerar som ett”. Deras kroppar är beströdda med nästan 300 små sinnesorgan som kan känna vattenrörelser, ljus och kemikalier. Med detta distribuerade nätverk kan en igel upptäcka krusningar orsakade av ett simmande bytesdjur och sedan rikta in sig mot källan. Biologer vet dock fortfarande inte exakt hur alla dessa individuella signaler kombineras i nervsystemet för att styra djuret, eller hur dess beteende skulle förändras om hela fält av sensorer slutade fungera. Att göra sådana detaljerade experiment på levande djur är mycket svårt, så författarna vände sig till en förenklad digital igel.
Att bygga en digital igel
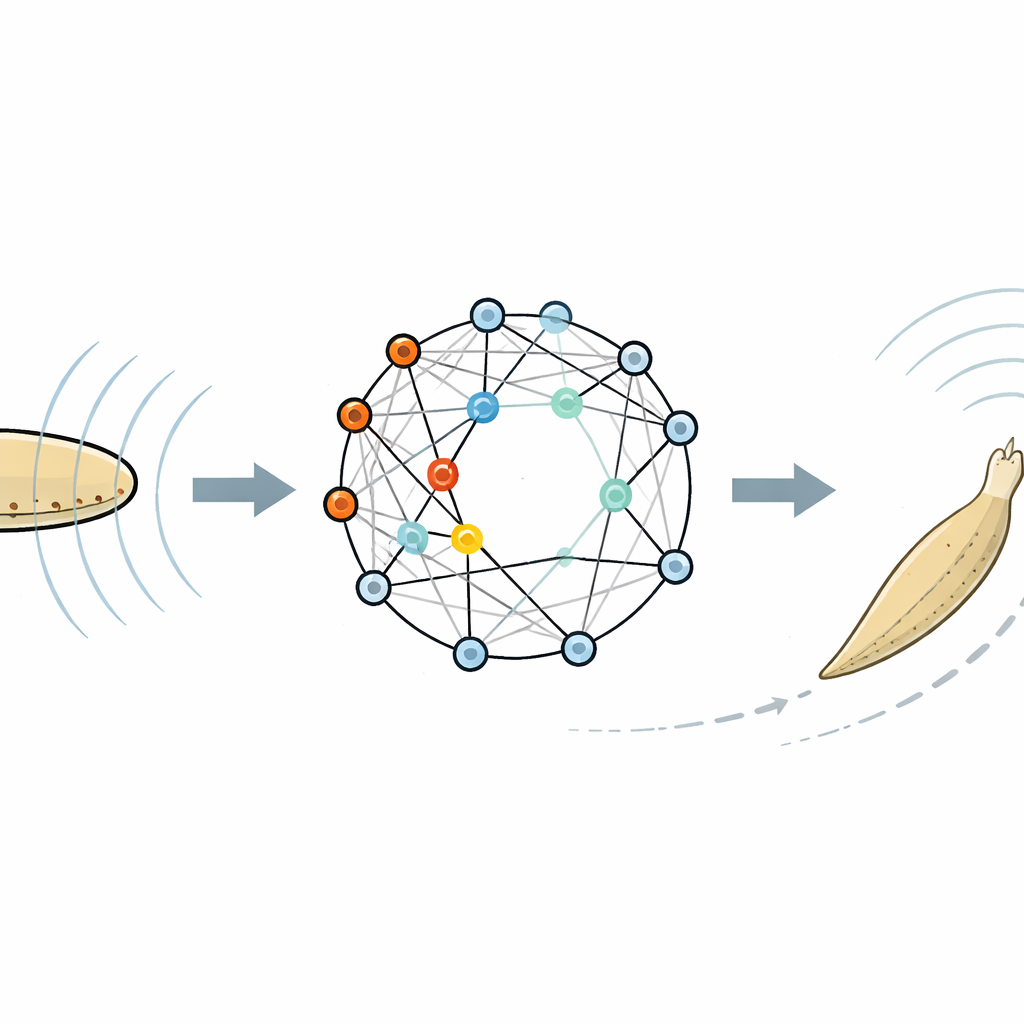
I datormodellen ersätts igelns flexibla kropp av en styv oval med bara 24 sensorgrupper jämnt fördelade runt den, där varje grupp står för många verkliga sensorer. Dessa grupper känner inkommande vattenvågor vars styrka beror på hur direkt de vetter mot vågkällan och på vågens frekvens. Deras utsignaler matar in i ett ”winner-take-all”-nätverk — en ring av neurala populationer som exciterar och hämmar varandra tills endast en liten region blir starkt aktiv. Den aktiva regionen pekar i en viss riktning, som den simulerade igeln sedan vänder sig mot innan den simulerar framåt simning. Genom att upprepa denna känn-fatta-rörelse-slingshot försöker agenten nå vågornas källa.
Att hitta den optimala frekvensen i krusningarna
När teamet varierade frekvensen på vattenvågorna och nätverkets känslighet stämde agentens beteende väl överens med verkliga iglars beteende i akvarieförsök. Mycket lågfrekventa vågor retade nästan inte sensorerna, så agenten vandrade nästan rakt fram och hittade sällan målet. Mycket högfrekventa vågor överstimulerade många sensorer samtidigt, vilket fick agenten att snurra åt slumpmässiga håll och återigen missa målet. Mellan dessa ytterligheter fanns en optimal zon: med vågfrekvenser runt 8–12 cykler per sekund och lämplig neural känslighet blev endast en liten klunga av neurala populationer starkt aktiv, och agenten styrde pålitligt mot källan. Detta är samma frekvensområde där levande iglar presterar bäst i experiment, vilket tyder på att den förenklade modellen fångar viktiga aspekter av deras avkänningsstrategi.
Vad händer när sensorer slutar fungera?
Modellen gjorde det enkelt att utföra ”virtuell kirurgi” genom att stänga av valda sensorgrupper. Att ta bort sensorer från en hel sida av kroppen ledde till dålig prestanda vid alla testade frekvenser, vilket antyder att jämförelse mellan vänster och höger input är avgörande för navigering. Andra mönster gav mer subtila effekter. Till exempel påverkade det knappt prestationen vid en typisk frekvens att inaktivera enbart främre sensorer, även om banorna böjde sig mer gradvis mot målet. Överraskande nog presterade agenten i vissa layouter där främre eller främre- och bakre sensorer tagits bort faktiskt bättre — men vid något högre vågfrekvenser. Dessa resultat antyder att ändringar i antalet och placeringen av sensorer kan förskjuta det bästa frekvensområdet utan att nödvändigtvis försämra navigeringen, ett mönster som ekar hur verkliga iglars känslighet förändras när de växer.
När fler sensorer slår brusiga data
Forskarna undersökte också hur väl agenten kunde hantera brusiga, opålitliga sensorer genom att lägga till slumpfel i inkommande signaler. Med ”högkvalitativa” sensorer var prestationen likartad oavsett om agenten hade 8, 24 eller 72 sensorgrupper. Men när sensorkvaliteten försämrades hjälpte fler sensorer: med 72 brusiga sensorer lyckades agenten fortfarande betydligt oftare än med bara 8, eftersom korrekta signaler från många håll tenderade att väga tyngre än de felaktiga. Detta antyder en möjlig anledning till att verkliga iglar bär så många enkla sensorer: redundans låter dem filtrera bort miljöstörningar och skador samtidigt som de fortfarande kan rikta in sig på användbara störningar.
Från dammlevande maskar till framtidens maskiner
Sammanfattningsvis visar studien att ett relativt enkelt system för avkänning och beslutsfattande kan reproducera mycket av den verkliga igelns förmåga att lokalisera källan till vattenkrusningar. Genom att justera hur känsligt det neurala nätverket är och genom att ändra hur många sensorer som finns och var de är placerade, kan modellen förutsäga när navigering kommer att lyckas eller misslyckas. För en lekmannaläsare är huvudpoängen att naturen ofta löser komplexa uppgifter — som att styra genom en brusig, föränderlig värld — inte med perfekta sensorer eller tung beräkning, utan med många modest utformade detektorer och ett robust sätt att låta det starkaste mönstret ”vinna”. Samma idé kan vägleda framtida konstruktioner för undervattensrobotar, medicinska enheter eller strukturovervakning som måste fortsätta fungera även när några av deras sensorer blir brusiga eller slutar fungera.
Citering: Gill, J.P., Nichols, S.T., Motevalian, M. et al. Bioinspired navigation based on distributed mechanoreception in the leech. npj Robot 4, 24 (2026). https://doi.org/10.1038/s44182-026-00082-3
Nyckelord: igelns navigation, distribuerad avkänning, mekanoreception, winner-take-all-nätverk, bioinspirerad robotik