Clear Sky Science · it
Navigazione bioispirata basata sulla meccanoricezione distribuita nella sanguisuga
Come un verme semplice può insegnare a percepire meglio
Gli animali acquatici spesso trovano cibo ed evitano pericoli avvertendo le increspature nell'acqua. Questo studio mostra come la modesta sanguisuga, ricoperta di minuscoli sensori tattili, possa ispirare nuovi modi per far navigare robot e altri dispositivi usando molti rilevatori semplici invece di pochi costosi. Costruendo un modello al computer di come una sanguisuga potrebbe combinare i segnali provenienti dai sensori distribuiti su tutto il corpo, gli autori esplorano come gli animali restino sulla rotta anche quando alcuni sensori sono rumorosi, danneggiati o mancanti — e come gli ingegneri possano prendere in prestito gli stessi stratagemmi.
Un corpo coperto di piccole orecchie
Le sanguisughe sono un banco di prova ideale per questa questione del “molti che agiscono come uno”. I loro corpi sono punteggiati da quasi 300 piccoli organi sensoriali che possono percepire il movimento dell'acqua, la luce e le sostanze chimiche. Con questa rete distribuita, una sanguisuga può rilevare le increspature generate da una preda che nuota e poi dirigersi verso la sorgente. Tuttavia i biologi non sanno ancora esattamente come tutti questi segnali individuali vengano combinati nel sistema nervoso per governare la guida dell'animale, né come cambierebbe il comportamento se intere aree di sensori smettessero di funzionare. Svolgere esperimenti così dettagliati su animali vivi è estremamente difficile, perciò gli autori hanno realizzato una sanguisuga digitale semplificata.
Costruire una sanguisuga digitale
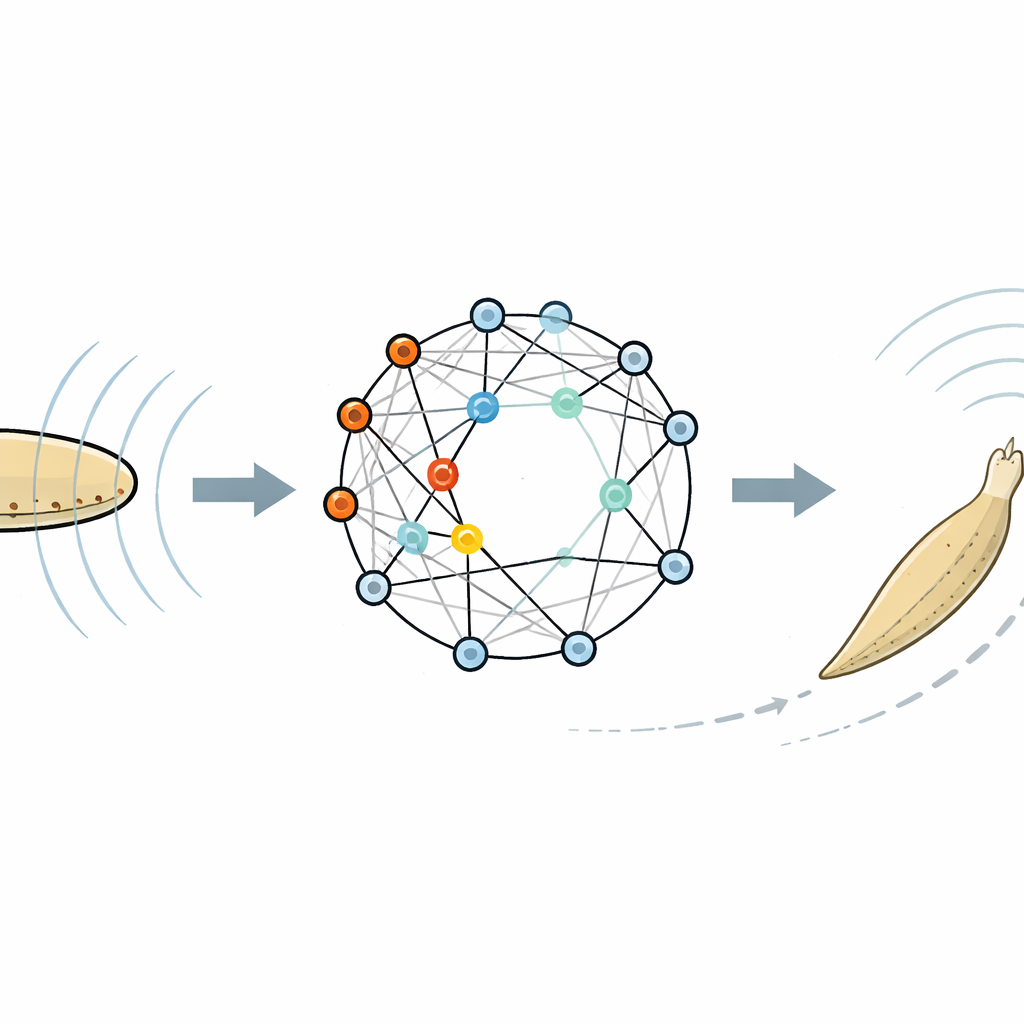
Nel modello al computer, il corpo flessibile della sanguisuga è sostituito da un ovale rigido con solo 24 gruppi di sensori disposti uniformemente attorno ad esso, ciascuno a rappresentare molti sensori reali. Questi gruppi percepiscono onde d'acqua in arrivo la cui intensità dipende da quanto direttamente guardano la sorgente delle onde e dalla frequenza delle onde stesse. Le loro uscite alimentano una rete “winner-take-all” — un anello di popolazioni neurali che si eccitano e si inibiscono a vicenda fino a quando solo una piccola regione diventa fortemente attiva. Quella regione attiva indica una direzione particolare, verso cui la sanguisuga simulata si orienta prima di nuotare in avanti. Ripetendo questo ciclo percepisci–decidi–muoviti, l'agente cerca di raggiungere la sorgente delle onde.
Trovare il punto ottimale nelle increspature
Quando il team ha variato la frequenza delle onde e la soglia di sensibilità della rete neurale, il comportamento dell'agente ha corrisposto da vicino a quello delle sanguisughe reali testate in una vasca. Onde a frequenza molto bassa sfioravano appena i sensori, quindi l'agente vagava quasi in linea retta e raramente trovava il bersaglio. Onde ad altissima frequenza sovrastimolavano molti sensori contemporaneamente, facendo ruotare l'agente in direzioni casuali e facendogli nuovamente mancare l'obiettivo. Tra questi estremi c'era però un punto ottimale: con frequenze di circa 8–12 cicli al secondo e una sensibilità neurale adeguata, solo un piccolo gruppo di popolazioni neurali diventava fortemente attivo e l'agente si dirigeva con affidabilità verso la sorgente. Questa è la stessa fascia di frequenze in cui le sanguisughe vive si comportano meglio negli esperimenti, suggerendo che il modello semplificato cattura caratteristiche chiave della loro strategia di rilevamento.
Cosa succede quando i sensori guastano?
Il modello ha reso facile eseguire una “chirurgia virtuale” disattivando gruppi selezionati di sensori. Rimuovere i sensori da un intero lato del corpo ha portato a prestazioni scadenti a tutte le frequenze testate, implicando che il confronto tra input sinistro e destro è cruciale per la navigazione. Altri schemi hanno prodotto effetti più sottili. Per esempio, disattivare solo i sensori anteriori ha danneggiato poco le prestazioni a una frequenza tipica, benché i percorsi curvassero più dolcemente verso il bersaglio. Sorprendentemente, in alcuni layout dove venivano rimossi i sensori anteriori o anteriori e posteriori, l'agente ha effettivamente mostrato prestazioni migliori — ma a frequenze d'onda leggermente più alte. Questi risultati suggeriscono che cambiare il numero e la collocazione dei sensori può spostare l'intervallo di frequenze ottimale senza necessariamente peggiorare la navigazione, un andamento che riecheggia come la sensibilità delle sanguisughe reali cambia durante la crescita.
Quando più sensori battono dati rumorosi
I ricercatori si sono anche chiesti quanto bene l'agente potesse affrontare sensori rumorosi e inaffidabili aggiungendo errori casuali ai segnali in ingresso. Con sensori di “alta qualità”, le prestazioni erano simili sia con 8, 24 o 72 gruppi di sensori. Ma quando la qualità dei sensori peggiorava, aggiungere più sensori aiutava: con 72 sensori rumorosi l'agente riusciva ancora a ottenere il successo molto più spesso che con soli 8, perché i segnali corretti provenienti da molte direzioni tendevano a prevalere su quelli errati. Ciò suggerisce una ragione per cui le sanguisughe reali possiedono così tanti sensori semplici: la ridondanza permette di filtrare il rumore ambientale e i danni pur continuando a localizzare le perturbazioni utili.
Dai vermi stagni alle macchine del futuro
Complessivamente, lo studio mostra che uno schema relativamente semplice di percezione e presa di decisione può riprodurre gran parte della capacità reale della sanguisuga di localizzare la sorgente delle increspature. Regolando la sensibilità della rete neurale e cambiando quanti sensori sono disponibili e dove sono posizionati, il modello predice quando la navigazione avrà successo o fallirà. Per il lettore non specialista, la conclusione principale è che la natura spesso risolve compiti complessi — come dirigersi attraverso un mondo rumoroso e in evoluzione — non con sensori perfetti o calcoli pesanti, ma con molti rivelatori modesti e un modo robusto per lasciare che il pattern più forte “vinca”. Questa stessa idea potrebbe guidare i progetti futuri di robot subacquei, dispositivi medici o monitor strutturali che devono continuare a funzionare anche quando alcuni dei loro sensori diventano rumorosi o guasti.
Citazione: Gill, J.P., Nichols, S.T., Motevalian, M. et al. Bioinspired navigation based on distributed mechanoreception in the leech. npj Robot 4, 24 (2026). https://doi.org/10.1038/s44182-026-00082-3
Parole chiave: navigazione della sanguisuga, sensing distribuito, meccanoricezione, rete winner-take-all, robotica bioispirata