Clear Sky Science · he
ניווט בהשראה ביולוגית המבוסס על מכאנורצפטיה מפוזרת בטרמיטים
איך תולעת פשוטה יכולה ללמד חישה חכמה יותר
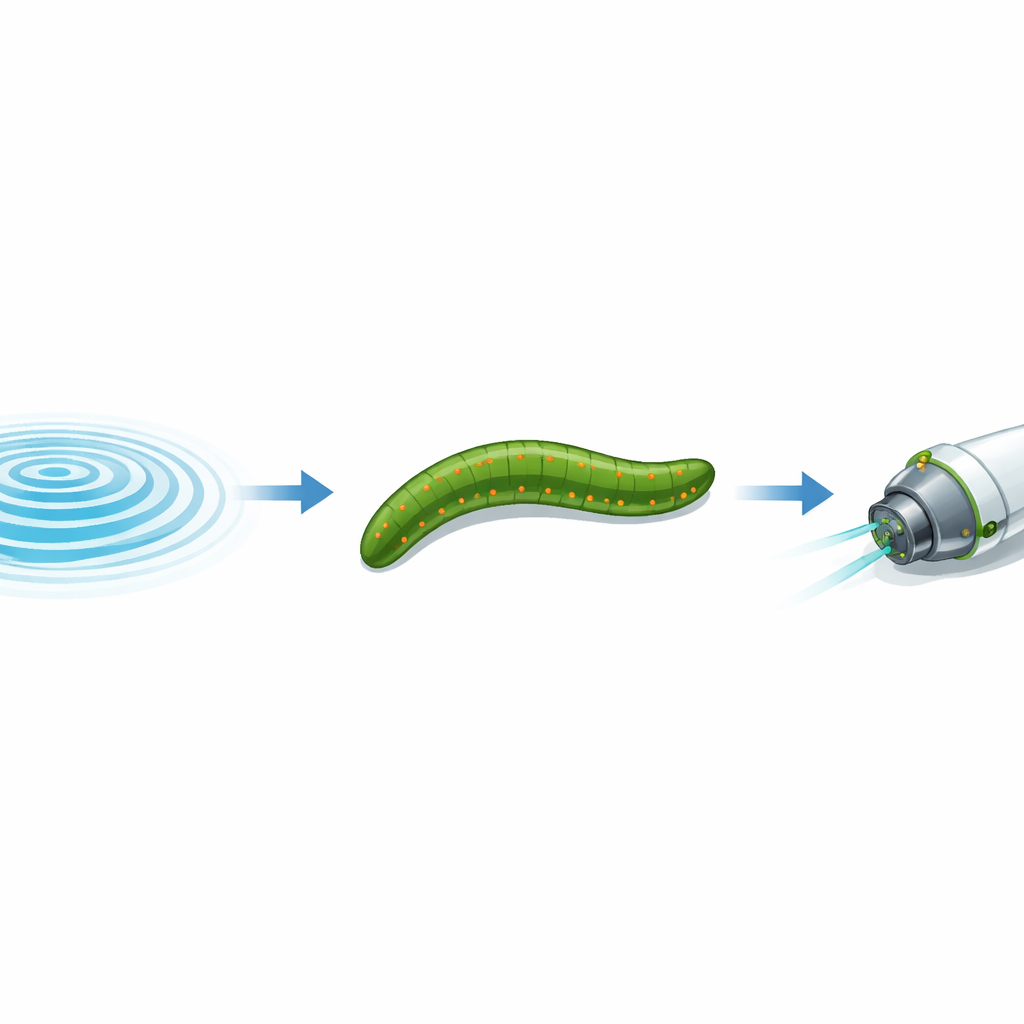
בעלי חיים ימיים לעתים קרובות מוצאים מזון וממלטים מסכנה על ידי חישה של גלים במים. מחקר זה מראה כיצד הברך הצנועה, המצופה בחיישני מגע זעירים, יכולה להוות השראה לשיטות חדשות שבהן רובוטים ומכונות אחרות נוהגים באמצעות רבים מחיישנים פשוטים במקום מעטים ויקרים. על ידי בניית מודל מחשב של האופן שבו ברך עשויה לשלב אותות מחיישנים הפרושים על גופה, המחברים בוחנים כיצד בעלי חיים שומרים על קו תנועה גם כאשר חלק מהחיישנים רעשניים, פגומים או חסרים — וכיצד מהנדסים עשויים לשאוב את אותן שיטות.
גוף מכוסה באוזניים זעירות
ברכים הם ערכות ניסוי אידיאליות לשאלה של «רבים פועלים כאחד». גופם מלא בכמעט 300 איברי חישה קטנים היכולים להרגיש תנועת מים, אור וכימיקלים. עם רשת מפוזרת זו, ברך יכולה לזהות גלים שנוצרו על ידי טרף שוחה ואז לנווט אל המקור. עם זאת, ביולוגים עדיין אינם יודעים בדיוק כיצד כל אותות הבודדים הללו משולבים במערכת העצבים כדי לכוון את החיה, או כיצד ישתנה התנהגותה אם אזורים שלמים של חיישנים יפסיקו לפעול. ביצוע ניסויים מפורטים כאלה על חיות חיות הוא קשה מאוד, ולכן החוקרים עברו לברך דיגיטלית מופשטת.
בניית ברך דיגיטלית
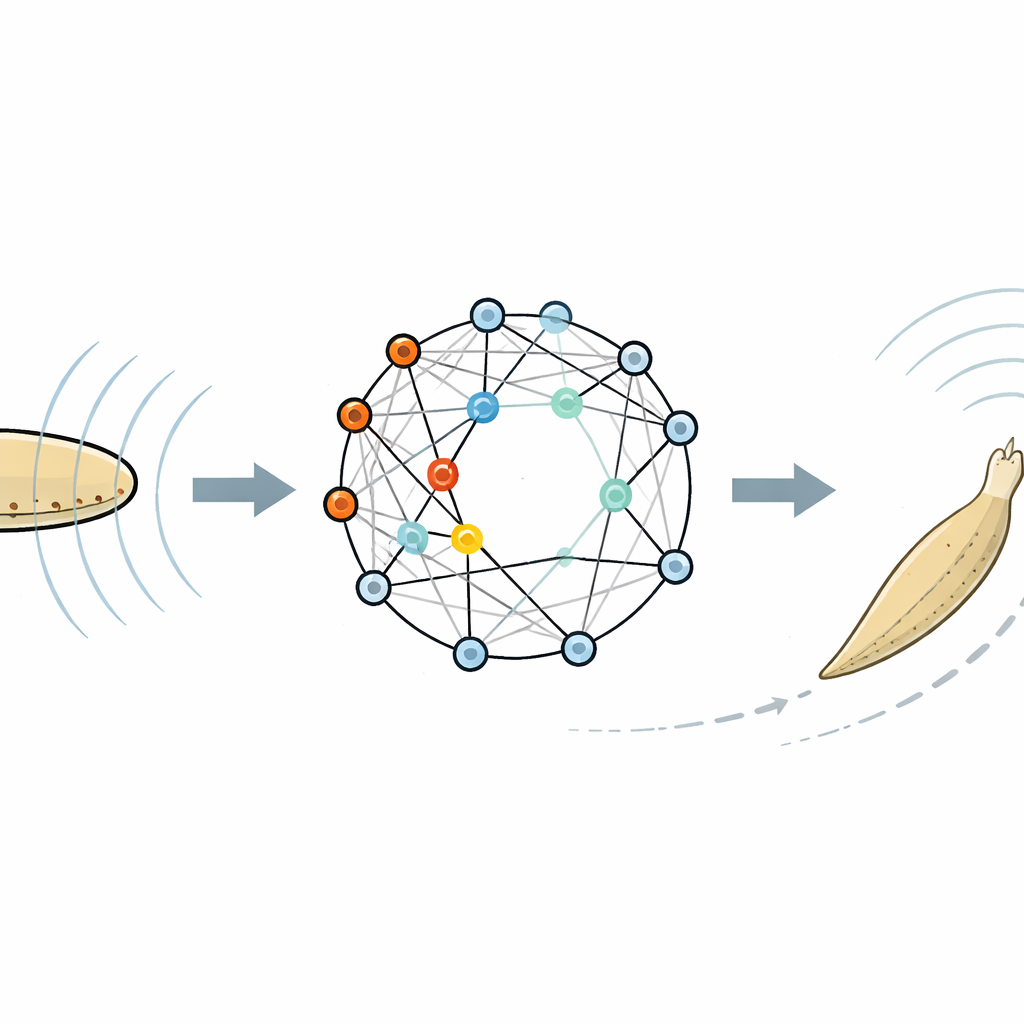
במודל המחשב, הגוף הגמיש של הברך הוחלף באובאל קשיח עם 24 קבוצות חיישנים בלבד המפוזרות באופן שווה סביבו, כשכל קבוצה מייצגת ריבוי חיישנים אמיתיים. קבוצות אלה חשות גלי מים נכנסים שעוצמתם תלויה בכמה שהן פונות ישירות לעבר מקור הגל ובתדירות הגל. הפלטים שלהן מוזנים לרשת «מנצחת-לוקחת-הכול» — טבעת של אוכלוסיות עצביות שמעוררות ומעכבות זו את זו עד שרק אזור קטן הופך לפעיל בעוצמה. האזור הפעיל מצביע בכיוון מסוים, שבו הברך המדומה פונה לפני השחייה קדימה. על ידי חזרה על הלולאה חישה–החלטה–תנועה, הסוכן מנסה להגיע למקור הגלים.
מציאת נקודת האיזון בגלים
כאשר הצוות שינה את תדירות גלי המים ואת סף הרגישות של הרשת העצבית, התנהגות הסוכן התאימה במידה רבה לזו של ברכים אמיתיות שנבדקו במיכל. גלי תדירות נמוכה מאוד כמעט ולא גירו את החיישנים, כך שהסוכן סייר כמעט בקו ישר ומעט מצא את המטרה. גלי תדירות גבוהה מאוד גרמו לגירוי-יתר של חיישנים רבים בו־זמנית, מה שגרם לסוכן להסתובב בכיוונים אקראיים ולפספס שוב את המטרה. בין קצוות אלה נמצא אזור אידאלי: בתדרים סביב 8–12 מחזורים לשנייה וברגישות עצבית מתאימה, רק אשכול קטן של אוכלוסיות עצביות הפך לפעיל בעוצמה, והסוכן ייצב את הנווט לעבר המקור. טווח תדרים זה הוא גם הטווח שבו ברכים חיות מציגות ביצועים מיטביים בניסויים, דבר המציע שהמודל המופשט לוכד מאפיינים מרכזיים של אסטרטגיית החישה שלהן.
מה קורה כשהחיישנים נכשלים?
המודל איפשר לבצע «ניתוחים וירטואליים» על ידי כיבוי קבוצות חיישנים נבחרות. הסרת חיישנים מכל צד של הגוף הובילה לביצועים גרועים בכל התדרים שנבדקו, דבר המרמז שהשוואת קלט שמאלי וימני חשובה לניווט. דפוסים אחרים גרמו להשפעות עדינות יותר. למשל, השבתת חיישנים מלפנים כמעט ולא פגעה בביצועים בתדירות טיפוסית, אם כי המסלולים התעקמו בהדרגה יותר אל היעד. באופן מפתיע, בפריסות מסוימות שבהן הוסרו חיישנים קדמיים או קדמיים-ואחורים, הסוכן אף פעל טוב יותר — אך בתדרי גלים מעט גבוהים יותר. תוצאות אלה מרמזות ששינוי במספר ובמיקום החיישנים עשוי להזיז את טווח התדרים האידיאלי מבלי שלא בהכרח להחמיר את הניווט, דפוס המשקף כיצד הרגישות של ברכים אמיתיות משתנה ככל שהן גדלות.
מתי יותר חיישנים גוברים על נתונים רעשניים
החוקרים בחנו גם עד כמה הסוכן יכול להתמודד עם חיישנים רעשניים ולא מהימנים על ידי הוספת שגיאות אקראיות לאותות הנכנסים. עם חיישנים «איכותיים», הביצועים היו דומים אם היו לסוכן 8, 24 או 72 קבוצות חיישנים. אך כאשר איכות החיישנים הוחלשה, הוספת חיישנים עזרה: עם 72 חיישנים רעשניים, הסוכן הצליח עדיין בתדירות רבה יותר מאשר עם 8 בלבד, מכיוון שהאותים הנכונים ממספר כיוונים נטו לגבור על האותות השגויים. זה מציע סיבה אפשרית לכך שברכים אמיתיות נושאות כל כך הרבה חיישנים פשוטים: רזרבה מאפשרת להן לסנן רעש סביבתי ונזק תוך כדי שמירה על יכולת התמקדות בהפרעות מועילות.
מתולעים החיות למכונות העתיד
בסך הכל, המחקר מראה כי סכימה יחסית פשוטה של חישה וקבלת החלטות יכולה לשחזר חלק ניכר מיכולת הברך האמיתית לאתר את מקור גלי המים. על ידי התאמת רגישות הרשת העצבית ושינוי מספר החיישנים ומקומם, המודל חוזה מתי הניווט יצליח ומתי ייכשל. לקורא כללי, המסקנה המרכזית היא שהטבע לעתים קרובות פותר משימות מורכבות — כמו ניווט בעולם רעשני ומשתנה — לא באמצעות חיישנים מושלמים או חישוב כבד, אלא באמצעות רבים של גלאים צנועים ובדרך יציבה שמאפשרת לדפוס החזק ביותר "לנצח". רעיון זה יכול להנחות עיצובים עתידיים של רובוטים תת-מימיים, התקנים רפואיים או מערכות ניטור מבניות שצריכות להמשיך לפעול גם כאשר חלק מחיישניהם רעשניים או נכשלים.
ציטוט: Gill, J.P., Nichols, S.T., Motevalian, M. et al. Bioinspired navigation based on distributed mechanoreception in the leech. npj Robot 4, 24 (2026). https://doi.org/10.1038/s44182-026-00082-3
מילות מפתח: ניווט של חסילון, חישה מבוזרת, מכאנורצפטיה, רשת מנצחת-לוקחת-הכול, רובוטיקה בהשראה ביולוגית