Clear Sky Science · zh
具有增强弯曲性和基于人工智能预测的软体机器人内镜设计
为钥孔手术带来更温和的器械
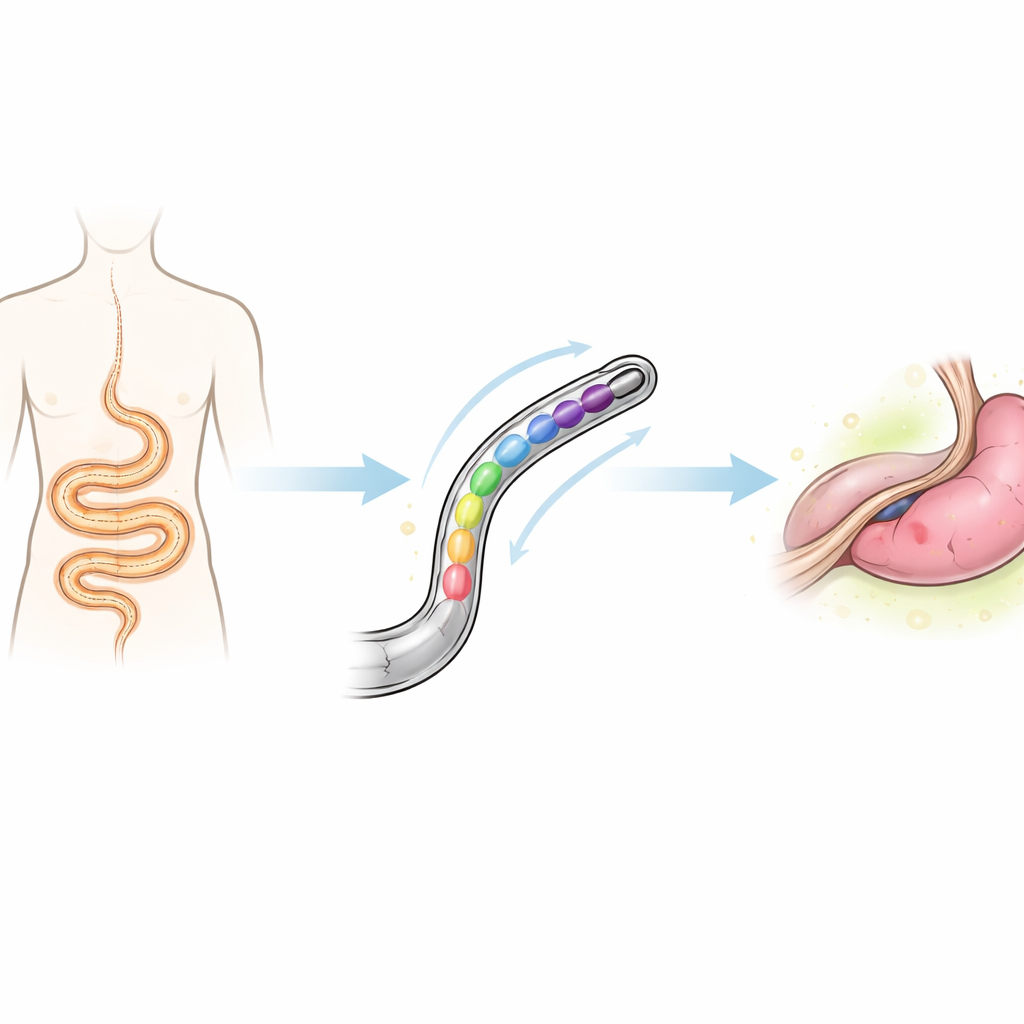
如今许多现代手术通过微小切口或自然腔道进行,而不是通过大切口。这种称为微创手术的方法能让患者更快恢复,疼痛更少。但要使其顺利实施,医生需要像蛇一样细长、可控的器械,能够在不损伤脆弱组织的情况下穿行于人体蜿蜒的通道。本文介绍了一种新型软性、柔顺的内镜,它在更低的内部压力下更容易弯曲,并配备了一个能够预测其运动的智能计算模型。两者结合指向了对患者更安全、对外科医生更易操控的手术器械方向。
传统内镜为何不足
传统内镜通常处于两端格局:刚性内镜强壮且精确,但难以穿越体内深处的急弯;极柔性的内镜可以到达更远处,但可能发生屈曲、回环或失控,令手术操作难以准确完成。软体机器人内镜试图通过使用类似橡胶的材料来平滑弯曲,将两者优势结合起来:当内部腔室充气时可以弯曲。然而,许多现有设计需要相对较高的压力才能实现有用的弯曲,这带来安全隐患:若器件内压力接近或超过血压,发生故障可能伤及组织。早期设计还存在摩擦、鼓胀或运动不可预测的问题,而且每次设计修改通常都需要耗时的大规模计算机仿真。
一种新的弯曲体构型
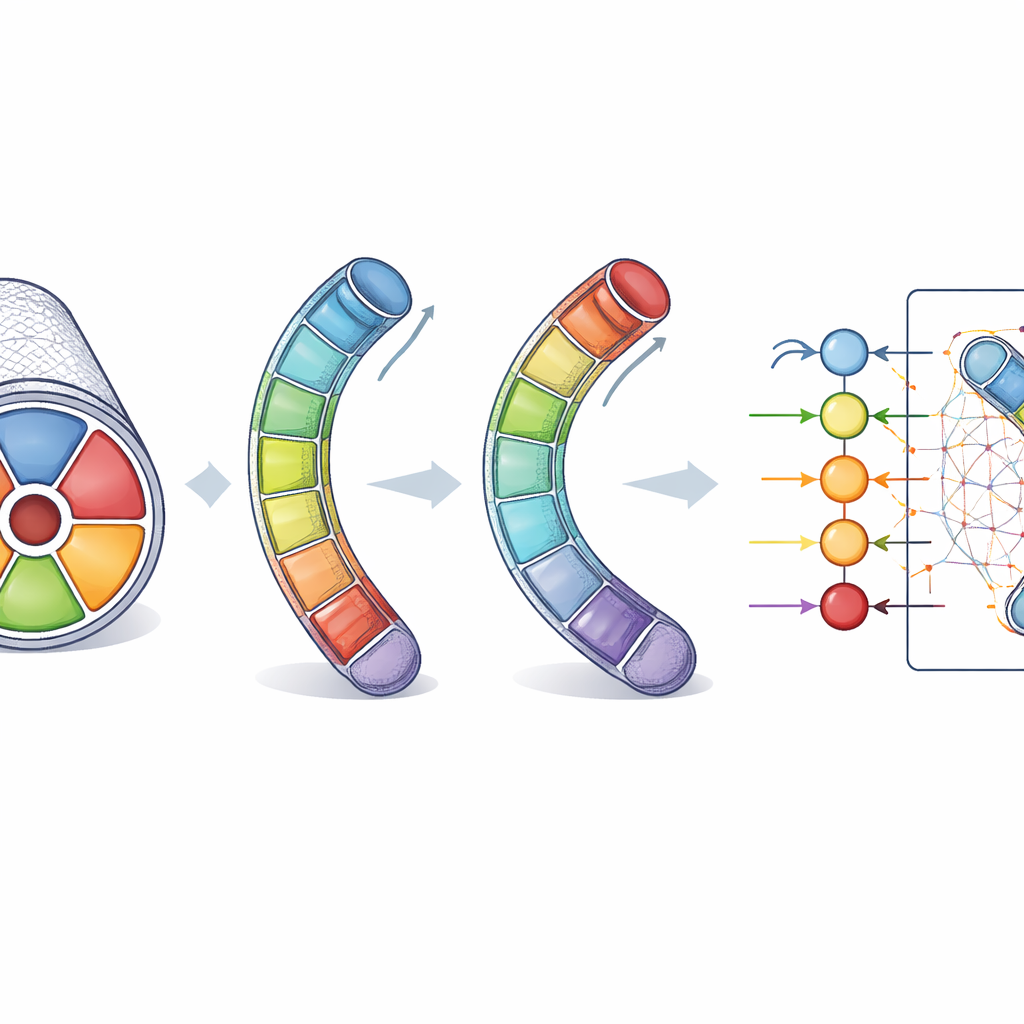
研究者提出了一种重新设计的软性内镜,其形状为短柱体,内部沿中心周围布置了五个气室。每个气室的横截面为半月形而非简单的圆形,这有助于在减少不必要鼓胀的情况下产生更强的弯曲力。外围包覆一层轻质纤维薄套,当充气时可防止向外鼓起并保持结构稳定。通过谨慎选择气室的数量、形状与位置,团队开发出一款模块,在仅0.2巴的压力下即可达到约90度的弯曲角——低于典型血压,并且在类似条件下比已有领先设计提高了超过10%的弯曲幅度。这使得在保持对周围组织负载较低的同时更容易绕过急弯。
在虚拟世界中测试设计
为了确切了解内镜的行为,作者首先依赖详细的计算机仿真。利用有限元分析方法,他们对软硅胶本体及其外部纤维层在改变腔室气压时的响应进行了建模。这使他们能够预测器件会弯曲或扭转多少,并检查材料是否仍在安全极限内工作。团队尝试了不同的网格分辨率——即将器件划分为更细单元进行计算的程度——直到结果不再显著变化为止,这表明预测已收敛且稳定。这些仿真表明,通过调整哪些气室加压以及加压多少,可以在不同方向上产生受控弯曲,并在需要时实现绕中心轴的扭转。
让人工智能学习运动规律
对每一种新的压力分布或设计微调都运行如此详尽的仿真既缓慢又计算成本高。为了解决这个问题,研究者构建了一个数据驱动的预测模型,使用机器学习方法。他们在Python中生成了数百个示例案例,每个案例描述五个气室中压力的独特组合及由此产生的弯曲与扭转运动。两类学习算法——人工神经网络和支持向量机——被训练为从压力映射到四个输出:弯曲角、扭转角,以及这两种运动发生的速度。在对数据进行清理与缩放后,团队训练并测试了这些模型,发现两者都能较好地再现仿真结果,且神经网络整体表现略优。
从仿真到真实硬件
为验证虚拟模型是否吻合现实,作者用3D打印制作了实物模具,并用高度弹性的硅胶铸造了内镜本体。随后他们以严格控制的步骤对腔室充气,并测量真实器件的弯曲量。实验测得的弯曲角与仿真预测高度一致,少量差异可用硅胶材料的自然变化和数学模型的简化来解释。重复相同试验多次产生的弯曲角几乎相同,表明器件行为可靠。在一系列压力条件下,原型在更安全、更低的压力下实现了比以往设计更大的弯曲,验证了机械概念与基于人工智能的预测工具的有效性。
对患者与外科医生的意义
通俗地说,这项工作使我们更接近那种动作更像温柔指尖而非刚性棒状的外科器械。新的软体内镜能够在保持安全压力限度内实现急弯,帮助外科医生以更低的损伤风险到达隐藏或难以触及的区域。配套的人工智能模型则像一个快速的“查表”工具,在器械移动之前告诉设计者与未来的控制系统它将如何响应,而无需每次都重新运行繁重的仿真。通过进一步开发——例如连接多个段、添加实时传感和在测量与控制之间闭环——软体机器人学与人工智能的结合可望使微创手术更安全、更精确,并惠及更多患者。
引用: Hani, M., Elghitany, M.N., Sweif, R. et al. Design of a soft robotic endoscope with enhanced bending and AI-based prediction. Sci Rep 16, 12878 (2026). https://doi.org/10.1038/s41598-026-46334-y
关键词: 软体机器人内镜, 微创手术, 气动软执行器, 医疗机器人学, 人工智能建模