Clear Sky Science · he
עיצוב של אנדוסקופ רך רובוטי עם כיפוף משופר וחיזוי מבוסס בינה מלאכותית
כלים עדינים יותר לניתוחי חור מפתח
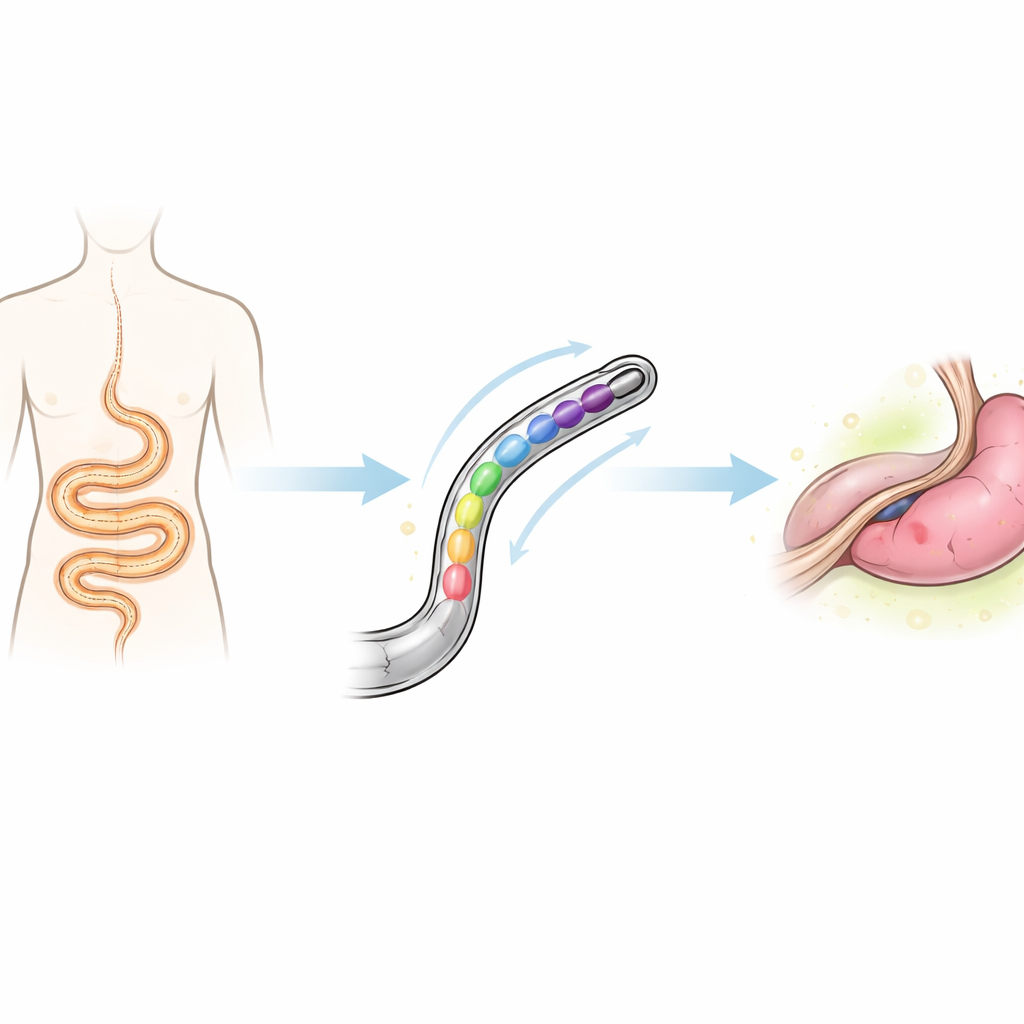
הרבה ניתוחים מודרניים מתבצעים כיום דרך חתכים זעירים או פתחים טבעיים במקום חתכים גדולים. גישה זו, הנקראת ניתוח פולשני מזערי, מסייעת למטופלים להחלים מהר יותר עם כאב פחות. אך כדי שזה יעבוד היטב, רופאים זקוקים לכלים ארוכים דמויי נחש שיכולים לנווט בשבילי הגוף המפותלים מבלי לפגוע ברקמות העדינות. מאמר זה מציג סוג חדש של אנדוסקופ רך וגמיש שמתכופף בקלות רבה יותר בעכבה פנימית נמוכה יותר, יחד עם מודל חכם שמסוגל לחזות כיצד הוא יזוז. יחד, הם מצביעים על כלים ניתוחיים שהם גם בטוחים יותר למטופלים וגם קלים יותר לשליטה עבור המנתחים.
מדוע הספקטים המסורתיים אינם מספקים
אנדוסקופים בקונבנציונליים נמצאים בשני קצוות. קשים הם חזקים ומדויקים אך מתקשים לנווט בעקומות חזקות עמוק בתוך הגוף. גמישים מאוד יכולים להגיע רחוק יותר אך עלולים להתקפל, להיווצר לולאות או לאבד שליטה, מה שמקשה על המנתחים לעבוד בדיוק. אנדוסקופים רכים רובוטיים מנסים לשלב את הטוב משני העולמות על ידי שימוש בחומרים גומי-עורפיים שמתעקללים בצורה חלקה כאשר תאי האוויר הפנימיים שלהם נלחצים. עם זאת, רבים מהעיצובים הנוכחיים דורשים לחץ יחסית גבוה כדי להשיג כיפוף שימושי, מה שמעלה חששות בטיחותיים: אם הלחץ בתוך המכשיר מתקרב או עולה על לחץ דם, כשל עלול לפגוע ברקמות. עיצובים קודמים סבלו גם מחיכוך, התנפחות לא רצויה או תנועה לא צפויה, ולעתים נזקקו לדימויים ממוחשבים כבדים בכל שינוי בעיצוב.
גוף כיפוף חדש
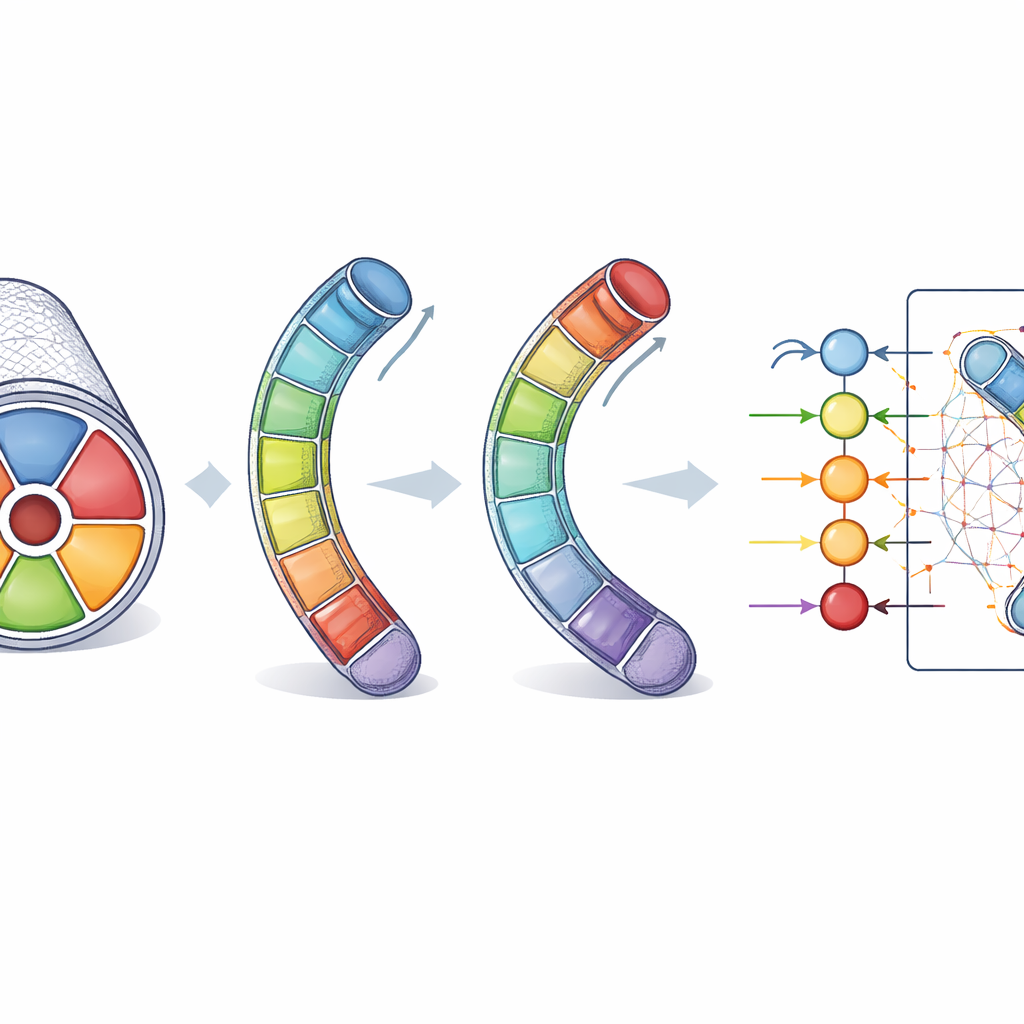
החוקרים מציעים אנדוסקופ רך שעוצב מחדש בצורת גליל קצר עם חמישה תאי אוויר פנימיים המסודרים סביב המרכז. לכל תא חתך חצי-ירחי במקום עיגול פשוט, מה שעוזר לייצר כיפוף חזק יותר עם פחות התנפחות בלתי רצויה. מעטפת סיב חיצונית קלה עוטפת את המכשיר, מונעת ממנו להתנפח החוצה כאשר מדחסים אוויר ושומרת על יציבות הצורה שלו. על ידי בחירה זהירה של מספר, צורה ומיקום התאים, הצוות יצר מודול שיכול להגיע לזווית כיפוף של כ־90 מעלות בעזרת לחץ של כ־0.2 בר בלבד — נמוך מלחץ הדם טיפוסי ויותר מ־10 אחוז טוב יותר מעיצוב מוביל קודם בתנאים דומים. זה מקל על הניווט מסביב לפינות חדות תוך שמירה על עומסים נמוכים על הרקמות סביב.
בדיקת העיצוב בעולם הווירטואלי
כדי להבין בדיוק כיצד האנדוסקופ שלהם יתנהג, המחברים החלו תחילה בהתבססות על הדמיות ממוחשבות מפורטות. באמצעות שיטה הנקראת ניתוח אלמנטים סופיים, הם מדמו את גוף הסיליקון הרך ואת שכבת הסיבים החיצונית כאשר לחצי האוויר בתאים משתנים. זה איפשר להם לחזות כמה המכשיר יתכופף או יסתובב ולבדוק האם החומר יישאר בטוח בתוך גבולותיו. הצוות ניסו רזולוציות רשת שונות — עד כמה המכשיר מפורק לחישוב — עד שהתוצאות חדלו להשתנות משמעותית, סימן לכך שהתחזיות יציבות. הדימויים הראו כי התאמת אילו תאים מתוך החמישה מדחסים ובאיזה מידה יכולה ליצור כיפוף מבוקר בכיוונים שונים ואם רוצים — גם סיבוב סביב הציר המרכזי.
מתן לבינה מלאכותית ללמוד את התנועה
הרצת דימויים כה מפורטים עבור כל דפוס לחץ חדש או שינוי עיצוב תהיה איטית ויקרה מבחינת חישוב. כדי להתגבר על כך, החוקרים בנו מודל חיזוי מבוסס נתונים באמצעות למידת מכונה. הם ייצרו מאות דוגמאות בפייתון, כל אחת מתארת שילוב ייחודי של לחצים בחמישה התאים והתנועות התוצאה של כיפוף וסיבוב. שני סוגי אלגוריתמי למידה — רשתות עצביות מלאכותיות ומכונות וקטור תמיכה — אומנו למפות מלחצי קלט לארבע תוצאות: זווית כיפוף, זווית סיבוב וכמה מהר מתרחשת כל אחת מהתנועות הללו. לאחר ניקוי וקנה-מידת הנתונים, הצוות אימן ובדק את המודלים, ומצא ששניהם יכולים לשחזר את תוצאות הדימוי בקירוב גבוה, כאשר הרשת העצבית ביצעה מעט טוב יותר בסך הכל.
מהדמיה לחומרה אמיתית
כדי לאשר שהמודלים הווירטואליים התיישרו עם המציאות, המחברים בנו תבניות פיזיות בעזרת מדפסת תלת-ממדית ויצקו את גוף האנדוסקופ בסיליקון גמיש מאוד. הם לאחר מכן הדחיסו את התאים בשלבים מבוקרים ומדדו כמה המכשיר האמיתי התכופף. זוויות הכיפוף הניסיוניות עקבו מקרוב אחרי תחזיות ההדמיה, עם הבדלים קטנים שניתן להסביר בשונות טבעית בסיליקון ובפישוטים במודל המתמטי. חזרת המבחן מספר פעמים הניבה זוויות כיפוף כמעט זהות, מה שמראה שהמכשיר מתנהג באופן אמין. בטווח לחצים מגוון, הפרוטוטייפ השיג כיפוף גבוה יותר מעיצובים קודמים בלחצים בטוחים ונמוכים יותר, ואישש הן את הקונספט המכניקלי והן את כלי החיזוי המבוססים על ה־AI.
מה זה אומר למטופלים ולמנתחים
בהגדרה יום-יומית, עבודה זו מקרבת אותנו לכלים ניתוחיים שנעים יותר כמו קצה אצבע עדין מאשר מקל נוקשה. האנדוסקופ הרך החדש יכול להתכופף בחדות תוך הישארות בתוך גבולות לחץ בטוחים, וכך לעזור למנתחים להגיע לאזורים מוסתרים או קשים לגישה עם סיכון פגיעה נמוך יותר. מודל ה־AI הנלווה פועל כמו "טבלת עיון" מהירה שמספקת למעצבים ובעתיד למערכות בקרה כיצד הסקופ יגיב לפני שהוא זז, בלי הצורך להריץ שוב סימולציות כבדים בכל פעם. עם פיתוח נוסף — כגון קישור בין מספר מקטעים, הוספת חישה בזמן אמת וסגירת הלולאה בין מדידות ושליטה — השילוב של רובוטיקה רכה ובינה מלאכותית יכול להפוך פרוצדורות פולשניות מזעריות לבטוחות, מדויקות ונגישות ליותר מטופלים.
ציטוט: Hani, M., Elghitany, M.N., Sweif, R. et al. Design of a soft robotic endoscope with enhanced bending and AI-based prediction. Sci Rep 16, 12878 (2026). https://doi.org/10.1038/s41598-026-46334-y
מילות מפתח: אנדוסקופ רך רובוטי, ניתוח פולשני מזערי, פועלים רכים פנאומטיים, רובוטיקה רפואית, מידול בבינה מלאכותית