Clear Sky Science · sv
Design av ett mjukt robotiskt endoskop med förbättrad böjning och AI-baserad prediktion
Mildare verktyg för titthålskirurgi
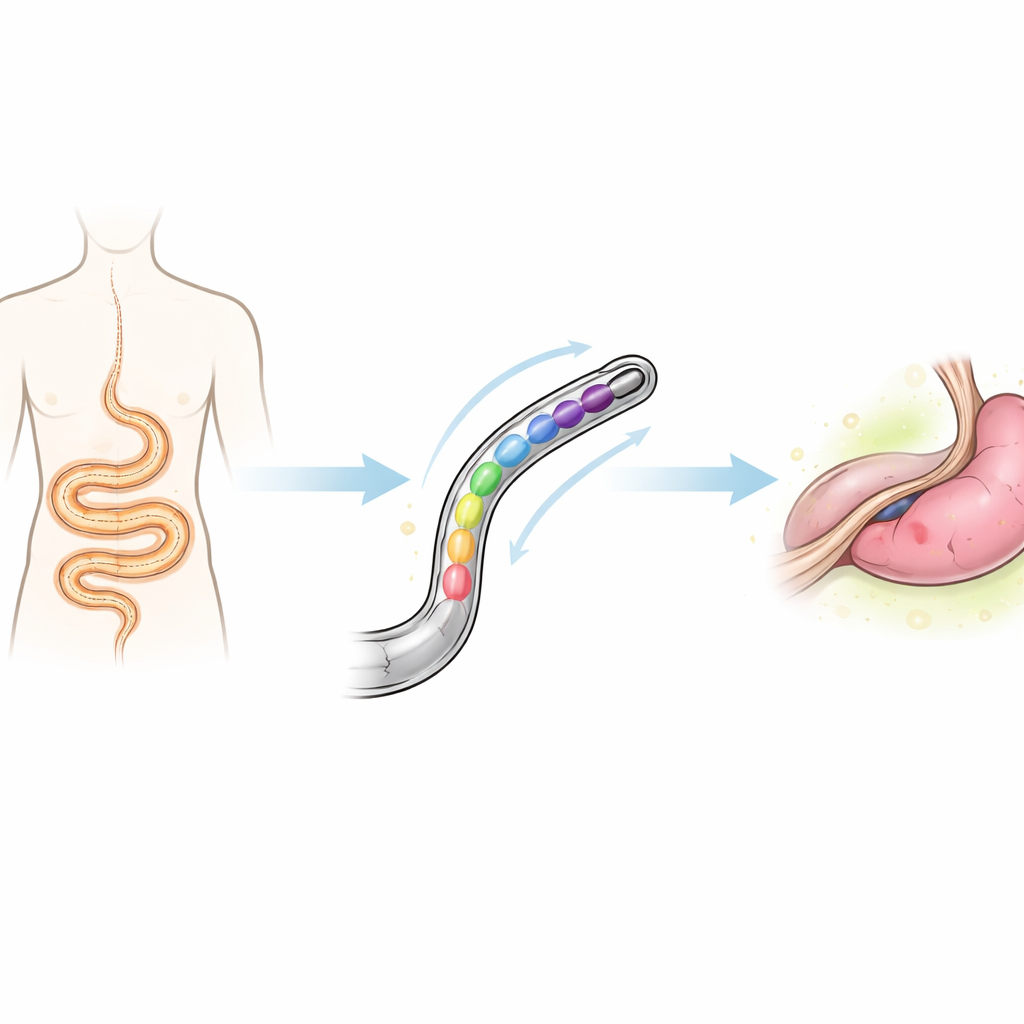
Många moderna operationer utförs nu genom små snitt eller kroppens naturliga öppningar i stället för stora ingrepp. Detta tillvägagångssätt, kallat minimalt invasiv kirurgi, hjälper patienter att återhämta sig snabbare och med mindre smärta. För att metoden ska fungera bra behöver kirurger långa, ormliknande instrument som kan styra genom kroppens slingrande passager utan att skada känslig vävnad. Denna artikel presenterar en ny typ av mjukt, flexibelt endoskop som böjer sig lättare vid lägre inre tryck, tillsammans med en smart datormodell som kan förutsäga hur det kommer att röra sig. Tillsammans pekar de mot kirurgiska instrument som både är säkrare för patienter och lättare för kirurger att kontrollera.
Varför traditionella scop fallerar
Konventionella endoskop ligger i två ytterligheter. Rigidare varianter är starka och precisa men har svårt att navigera tajta kurvor djupt inne i kroppen. Mycket flexibla instrument når längre men kan buckla, bilda slingor eller förlora kontrollen, vilket försvårar kirurgiskt arbete. Mjuka robotiska endoskop försöker kombinera det bästa av båda genom att använda gummiliknande material som böjer sig smidigt när deras inre kammare pressuriseras. Ändå kräver många nuvarande konstruktioner relativt högt tryck för att uppnå användbar böjning, vilket väcker säkerhetsbekymmer: om trycket i enheten närmar sig eller överstiger blodtrycket kan ett fel skada vävnad. Tidigare modeller led också av friktion, ballongliknande utbuktning eller oförutsägbar rörelse, och de krävde ofta tunga datorbaserade simuleringar varje gång designen ändrades.
En ny böjbar kropp
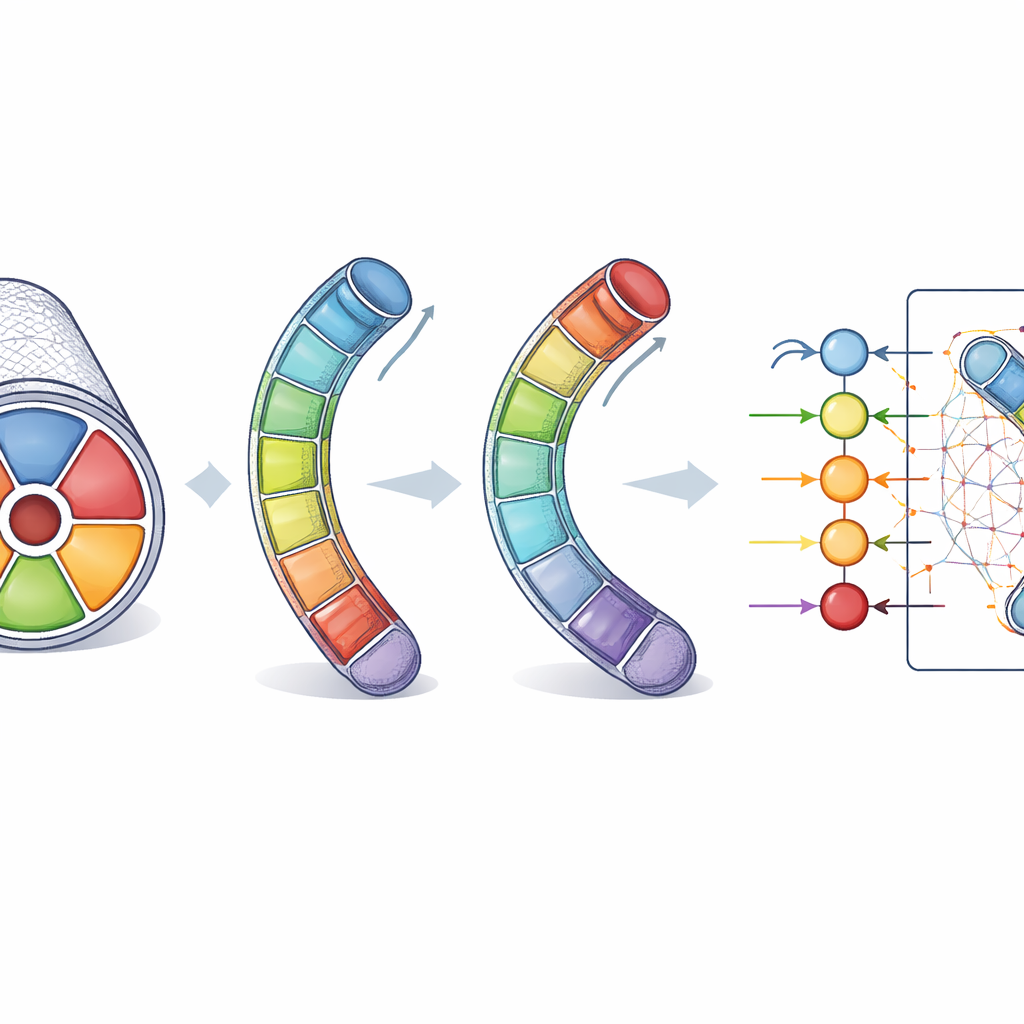
Forskarna föreslår ett omarbetat mjukt endoskop format som en kort cylinder med fem inre luftkammare ordnade runt centrum. Varje kammare har en halvmåneformad tvärsnitt i stället för en enkel cirkel, vilket ger starkare böjning med mindre oönskad utbuktning. Ett lätt ytligt fiberhölje omsluter enheten och förhindrar att den bubblar utåt när luft pumpas in och håller formen stabil. Genom noggrant val av antal, form och placering av kammarna skapade teamet en modul som kan nå en böjvinkel på ungefär 90 grader med endast 0,2 bar tryck—lägre än typiskt blodtryck och mer än 10 procent bättre än en ledande tidigare design under liknande förhållanden. Detta gör det lättare att styra runt skarpa hörn samtidigt som belastningen på omgivande vävnad hålls låg.
Testa designen i den virtuella världen
För att förstå exakt hur deras endoskop skulle bete sig förlitade sig författarna först på detaljerade datorsimuleringar. Med en metod kallad ändlig elementanalys modellerade de den mjuka silikonkroppen och dess yttre fiberlager medan lufttrycken i kammarna varierades. Detta gjorde det möjligt att förutsäga hur mycket enheten skulle böja sig eller vrida sig och att kontrollera om materialet skulle förbli säkert inom sina gränser. Teamet experimenterade med olika nätupplösningar—hur fint enheten delas upp för beräkning—tills resultaten inte längre förändrades signifikant, ett tecken på att prognoserna var stabila. Dessa simuleringar visade att justering av vilka kammare som pressuriseras, och i vilken grad, kan framkalla kontrollerad böjning i olika riktningar och, om så önskas, vridning runt centralaxeln.
Låta artificiell intelligens lära rörelsen
Att köra sådana detaljerade simuleringar för varje nytt tryckmönster eller designändring skulle vara långsamt och beräkningskostsamt. För att övervinna detta byggde forskarna en datadriven prediktionsmodell med maskininlärning. De genererade hundratals exempel i Python, där varje fall beskrev en unik kombination av tryck i de fem kammarna och de resulterande böjnings- och vridrörelserna. Två typer av inlärningsalgoritmer—artificiella neurala nätverk och supportvektormaskiner—tränades för att mappa från tryck till fyra utfall: böjvinkel, vridningsvinkel och hur snabbt vardera rörelse sker. Efter att ha rensat och skalat data tränade och testade teamet dessa modeller och fann att båda kunde reproducera simuleringsresultaten nära, med det neurala nätverket som presterade något bättre i stort.
Från simulering till verklig hårdvara
För att bekräfta att deras virtuella modeller stämde med verkligheten byggde författarna fysiska formar med en 3D-skrivare och tillverkade endoskopkroppen i en mycket elastisk silikon. De pressuriserade sedan kamrarna i noggrant kontrollerade steg och mätte hur mycket den verkliga enheten böjde sig. De experimentella böjvinklarna följde simuleringarnas förutsägelser nära, med små skillnader som kunde förklaras av naturliga variationer i silikonet och förenklingar i den matematiska modellen. Upprepade tester gav nästan identiska böjvinklar, vilket visar att enheten beter sig pålitligt. Över ett spann av tryck uppnådde prototypen större böjning än tidigare konstruktioner vid säkrare, lägre tryck, vilket validerar både den mekaniska idén och de AI-baserade prediktionsverktygen.
Vad detta betyder för patienter och kirurger
I vardagliga termer för oss närmare kirurgiska verktyg som rör sig mer som en mjuk fingertopp än en styv stång. Det nya mjuka endoskopet kan böja kraftigt samtidigt som det håller sig inom säkra tryckgränser, vilket hjälper kirurger att nå dolda eller svåråtkomliga områden med mindre risk för skada. Den medföljande AI-modellen fungerar som en snabb "uppslagstabell" som berättar för formgivare och i framtiden för styrsystem hur scopet kommer att reagera innan det rör sig, utan att behöva köra tunga simuleringar varje gång. Med fortsatt utveckling—såsom att koppla ihop flera segment, lägga till sensorer i realtid och sluta styrslingan mellan mätningar och kontroll—kan denna kombination av mjukrobotik och artificiell intelligens göra minimalt invasiva ingrepp säkrare, mer precisa och tillgängliga för fler patienter.
Citering: Hani, M., Elghitany, M.N., Sweif, R. et al. Design of a soft robotic endoscope with enhanced bending and AI-based prediction. Sci Rep 16, 12878 (2026). https://doi.org/10.1038/s41598-026-46334-y
Nyckelord: mjukt robotiskt endoskop, minimalt invasiv kirurgi, pneumatiska mjuka ställdon, medicinsk robotik, artificiell intelligensmodellering