Clear Sky Science · pl
Projekt miękkiego endoskopu robotycznego o zwiększonej zdolności zginania i predykcji opartej na SI
Bardziej delikatne narzędzia do chirurgii przez otwory
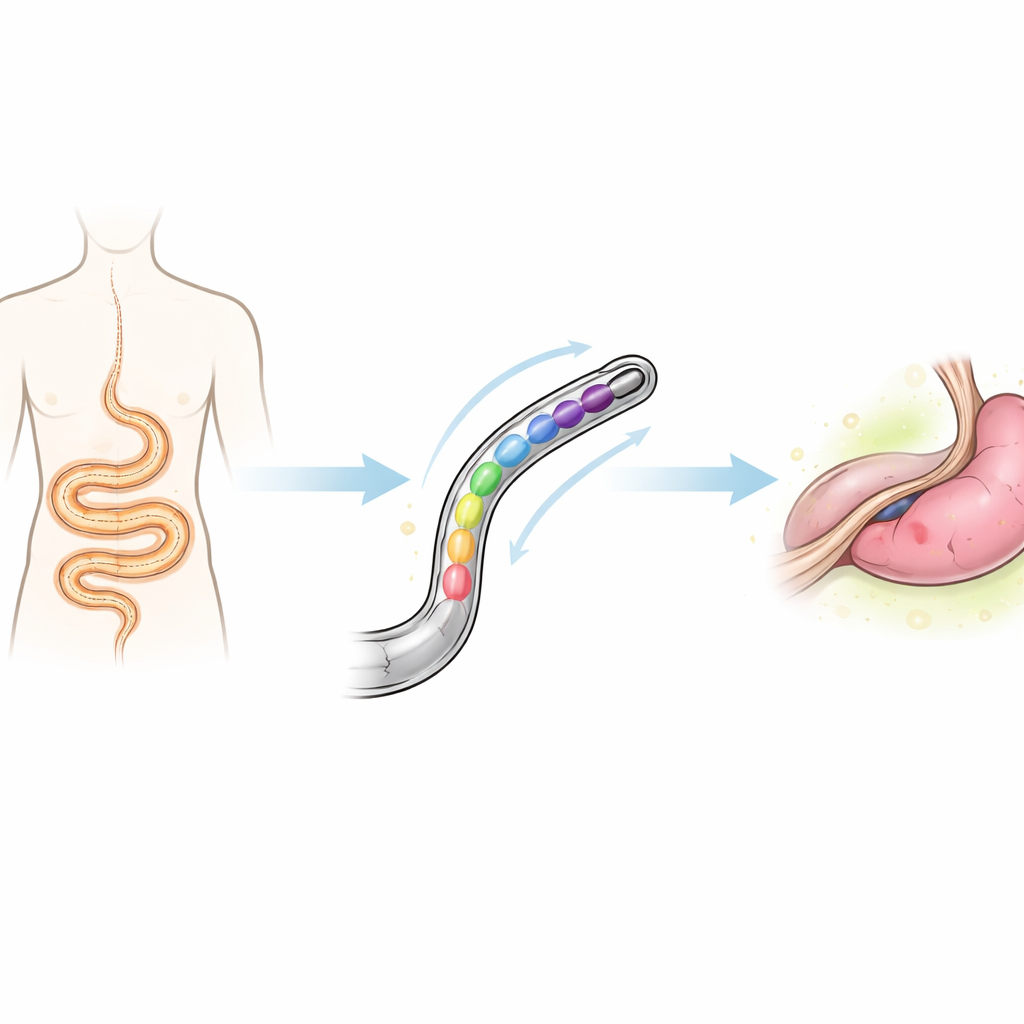
Wiele współczesnych zabiegów jest dziś wykonywanych przez niewielkie nacięcia lub naturalne otwory zamiast dużych rozcięć. To podejście, zwane chirurgią małoinwazyjną, pomaga pacjentom szybciej wracać do zdrowia i zmniejsza ból. Aby jednak działało dobrze, lekarze potrzebują długich, przypominających węża narzędzi, które mogą manewrować po krętych ścieżkach ciała, nie uszkadzając delikatnych tkanek. W artykule przedstawiono nowy rodzaj miękkiego, elastycznego endoskopu, który zgina się łatwiej przy niższym ciśnieniu wewnętrznym, oraz inteligentny model komputerowy potrafiący przewidzieć jego ruch. Razem wskazują na narzędzia chirurgiczne bezpieczniejsze dla pacjentów i łatwiejsze w kontroli dla chirurgów.
Dlaczego tradycyjne endoskopy zawodzą
Konwencjonalne endoskopy występują w dwóch skrajnościach. Sztywne są mocne i precyzyjne, ale mają trudności z pokonywaniem ostrych zakrętów głęboko w ciele. Bardzo elastyczne sięgają dalej, ale mogą się załamywać, tworzyć pętle lub tracić kontrolę, co utrudnia precyzyjną pracę chirurga. Miękkie robotyczne endoskopy próbują łączyć zalety obu typów, używając gumopodobnych materiałów, które gładko się wyginają po napompowaniu komór wewnętrznych. Mimo to wiele obecnych konstrukcji wymaga relatywnie wysokiego ciśnienia do osiągnięcia użytecznego zgięcia, co rodzi obawy bezpieczeństwa: jeśli ciśnienie wewnątrz urządzenia zbliży się do ciśnienia krwi lub je przewyższy, awaria mogłaby uszkodzić tkanki. Wcześniejsze projekty cierpiały też z powodu tarcia, nadmuchania czy nieprzewidywalnego ruchu i często wymagały ciężkich symulacji komputerowych przy każdej zmianie konstrukcji.
Nowe ciało zginające
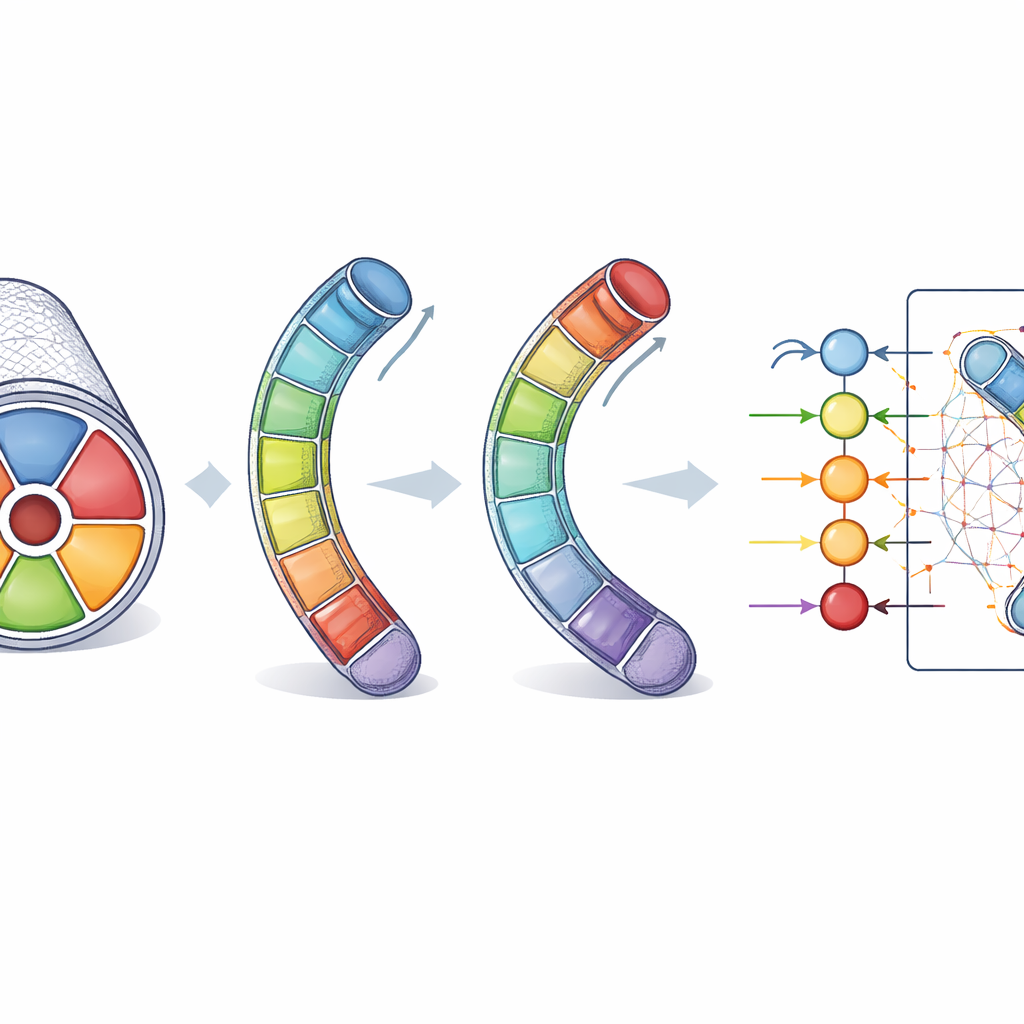
Autorzy proponują przeprojektowany miękki endoskop w kształcie krótkiego cylindra z pięcioma wewnętrznymi komorami powietrznymi rozmieszczonymi wokół osi. Każda komora ma przekrój w kształcie półksiężyca zamiast prostego koła, co pomaga generować silniejsze zginanie przy mniejszym niepożądanym wybrzuszeniu. Lekka zewnętrzna osłona z włókna oplata urządzenie, zapobiegając nadmiernemu rozdmuchiwaniu przy pompowaniu powietrza i utrzymując stabilny kształt. Poprzez staranny dobór liczby, kształtu i położenia komór zespół stworzył moduł, który może osiągnąć kąt zgięcia około 90 stopni używając jedynie 0,2 bara ciśnienia — mniej niż typowe ciśnienie krwi i ponad 10 procent lepiej niż wiodąca wcześniejsza konstrukcja w podobnych warunkach. Ułatwia to manewrowanie wokół ostrych zakrętów przy jednoczesnym utrzymaniu niskich obciążeń dla otaczających tkanek.
Testowanie projektu w świecie wirtualnym
Aby zrozumieć dokładnie, jak endoskop będzie się zachowywał, autorzy najpierw polegali na szczegółowych symulacjach komputerowych. Z użyciem metody elementów skończonych wymodelowali miękkie silikonowe ciało i jego zewnętrzną warstwę włókien podczas zmiany ciśnień w komorach. Pozwoliło to przewidzieć, jak bardzo urządzenie będzie się wyginać lub skręcać oraz sprawdzić, czy materiał pozostanie bezpiecznie w swoich granicach. Zespół eksperymentował z różnymi gęstościami siatki — stopniem podziału modelu do obliczeń — aż wyniki przestały się znacząco zmieniać, co było oznaką stabilności przewidywań. Symulacje wykazały, że odpowiedni dobór komór do napompowania i wysokość ciśnienia pozwala uzyskać kontrolowane zginanie w różnych kierunkach, a w razie potrzeby także skręcanie wokół osi centralnej.
Pozwolenie sztucznej inteligencji na poznanie ruchu
Uruchamianie tak szczegółowych symulacji dla każdego nowego wzorca ciśnień czy zmiany konstrukcji byłoby wolne i kosztowne obliczeniowo. Aby temu zaradzić, badacze zbudowali model predykcyjny oparty na danych przy użyciu uczenia maszynowego. Wygenerowali setki przykładów w Pythonie, z których każdy opisywał unikalną kombinację ciśnień w pięciu komorach i wynikające z tego ruchy zginania i skręcania. Dwa rodzaje algorytmów uczenia — sztuczne sieci neuronowe i maszyny wektorów wspierających — zostały wytrenowane do mapowania ciśnień na cztery wielkości wyjściowe: kąt zgięcia, kąt skrętu oraz szybkość występowania każdego z tych ruchów. Po oczyszczeniu i skalowaniu danych zespół trenował i testował modele, stwierdzając, że oba potrafią wiernie odtworzyć wyniki symulacji, a sieć neuronowa wypadała nieco lepiej w ogólnym ujęciu.
Od symulacji do rzeczywistego sprzętu
Aby potwierdzić, że wirtualne modele odpowiadają rzeczywistości, autorzy wykonali formy na drukarce 3D i odlali korpus endoskopu z bardzo rozciągliwego silikonu. Następnie precyzyjnie podnosili ciśnienie w komorach krokami i mierzyli, jak bardzo rzeczywiste urządzenie się wygina. Eksperymentalne kąty zgięcia ściśle pokrywały się z przewidywaniami symulacji, a drobne różnice tłumaczono naturalnymi odchyleniami w silikonie i uproszczeniami modelu matematycznego. Powtarzanie tych samych testów dawało niemal identyczne kąty zgięcia, co dowodzi, że zachowanie urządzenia jest powtarzalne. W całym zakresie ciśnień prototyp osiągał większe zgięcie niż wcześniejsze konstrukcje przy bezpieczniejszych, niższych ciśnieniach, weryfikując zarówno koncepcję mechaniczną, jak i narzędzia predykcyjne oparte na SI.
Co to oznacza dla pacjentów i chirurgów
Mówiąc prostymi słowami, praca ta przybliża nas do narzędzi chirurgicznych, które poruszają się bardziej jak delikatny koniuszek palca niż sztywny kij. Nowy miękki endoskop może gwałtownie się zginać, pozostając w bezpiecznych granicach ciśnienia, pomagając chirurgom dotrzeć do ukrytych lub trudno dostępnych miejsc z mniejszym ryzykiem uszkodzenia. Towarzyszący model SI działa jak szybka «tablica odwoławcza», która informuje projektantów i w przyszłości systemy sterowania, jak endoskop zareaguje zanim się poruszy, bez potrzeby ponownego uruchamiania ciężkich symulacji za każdym razem. Przy dalszym rozwoju — na przykład łączeniu wielu segmentów, dodaniu czujników w czasie rzeczywistym i zamknięciu pętli między pomiarami a sterowaniem — to połączenie miękkiej robotyki i sztucznej inteligencji może uczynić procedury małoinwazyjne bezpieczniejszymi, bardziej precyzyjnymi i dostępnymi dla większej liczby pacjentów.
Cytowanie: Hani, M., Elghitany, M.N., Sweif, R. et al. Design of a soft robotic endoscope with enhanced bending and AI-based prediction. Sci Rep 16, 12878 (2026). https://doi.org/10.1038/s41598-026-46334-y
Słowa kluczowe: miękki endoskop robotyczny, chirurgia małoinwazyjna, pneumatyczne miękkie aktuatory, robotyka medyczna, modelowanie z użyciem sztucznej inteligencji