Clear Sky Science · es
Diseño de un endoscopio robótico blando con mayor capacidad de flexión y predicción basada en IA
Herramientas más suaves para la cirugía por orificio
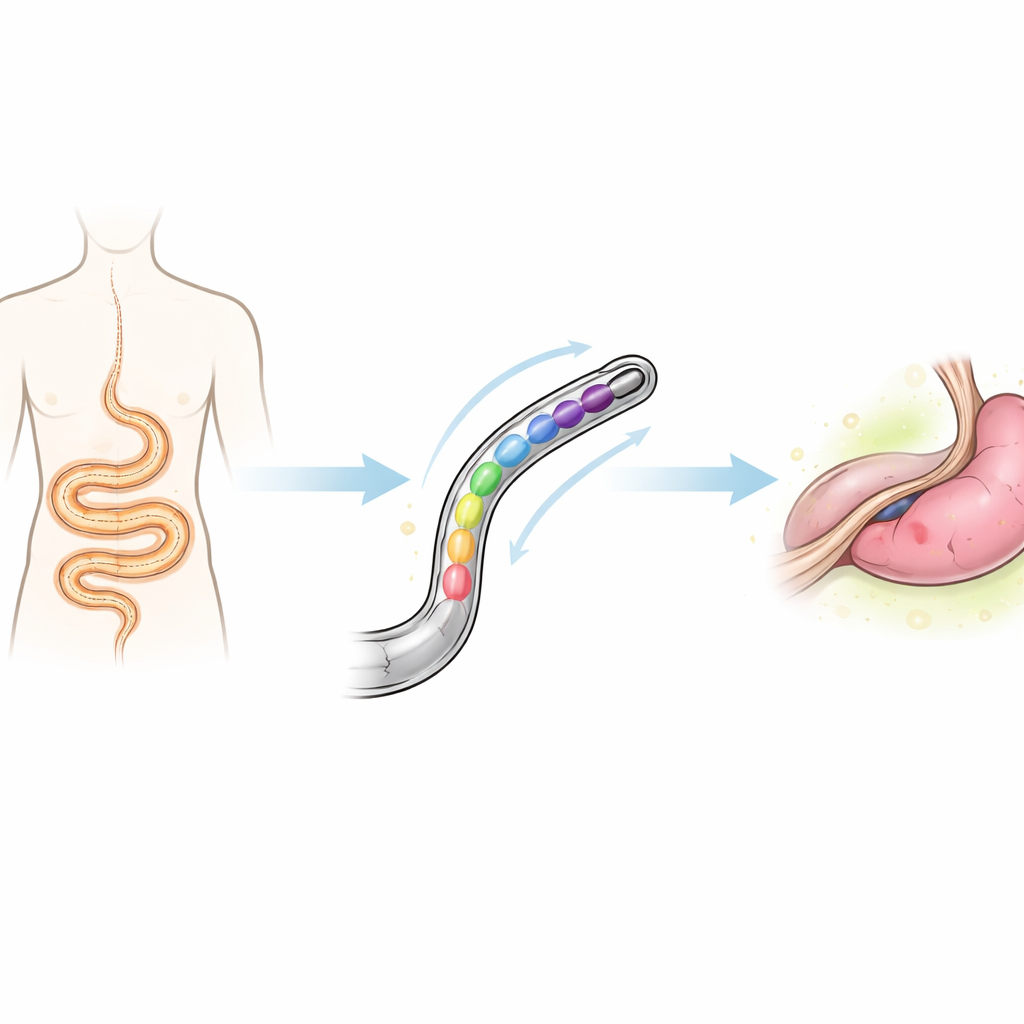
Hoy en día muchas cirugías modernas se realizan a través de pequeñas incisiones o aberturas naturales en lugar de cortes grandes. Este enfoque, denominado cirugía mínimamente invasiva, ayuda a los pacientes a recuperarse más rápido y con menos dolor. Pero para que funcione bien, los médicos necesitan instrumentos largos y serpentiformes que puedan navegar por los caminos sinuosos del cuerpo sin dañar los tejidos delicados. Este artículo presenta un nuevo tipo de endoscopio blando y flexible que se dobla con mayor facilidad a presiones internas más bajas, junto con un modelo informático inteligente capaz de predecir cómo se moverá. En conjunto, apuntan a herramientas quirúrgicas que son a la vez más seguras para los pacientes y más fáciles de controlar para los cirujanos.
Por qué los endoscopios tradicionales se quedan cortos
Los endoscopios convencionales se sitúan en dos extremos. Los rígidos son fuertes y precisos, pero les cuesta navegar curvas cerradas en zonas profundas del cuerpo. Los muy flexibles pueden llegar más lejos pero pueden pandeare, formar lazos o perder el control, lo que dificulta el trabajo preciso del cirujano. Los endoscopios robóticos blandos intentan combinar lo mejor de ambos mundos utilizando materiales gomosos que se doblan suavemente cuando se presurizan sus cámaras internas. Aun así, muchos diseños actuales requieren presiones relativamente altas para lograr una flexión útil, lo que plantea problemas de seguridad: si la presión dentro del dispositivo se acerca o supera la presión arterial, una falla podría dañar el tejido. Diseños anteriores también sufrían fricción, abultamientos imprevisibles o movimientos incontrolados, y a menudo requerían simulaciones computacionales pesadas cada vez que cambiaba el diseño.
Un nuevo cuerpo para la flexión
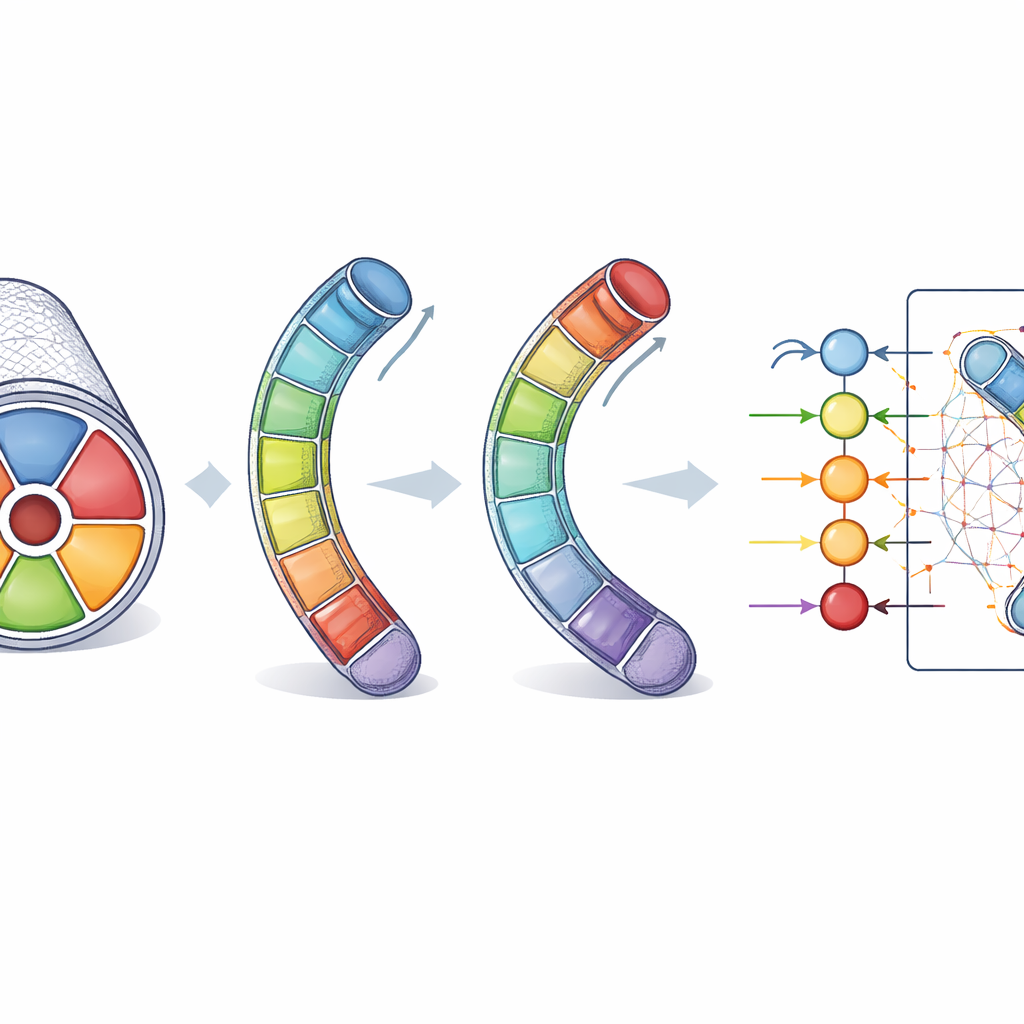
Los investigadores proponen un endoscopio blando rediseñado en forma de cilindro corto con cinco cámaras de aire internas dispuestas alrededor de su centro. Cada cámara tiene una sección transversal en forma de media luna en lugar de un simple círculo, lo que ayuda a generar una flexión más potente con menos abultamiento indeseado. Una funda externa ligera de fibras rodea el dispositivo, evitando que se infle hacia afuera cuando se introduce aire y manteniendo su forma estable. Al elegir cuidadosamente el número, la forma y la colocación de las cámaras, el equipo creó un módulo capaz de alcanzar un ángulo de flexión de alrededor de 90 grados usando solo 0,2 bar de presión—por debajo de la presión arterial típica y más de un 10 % mejor que un diseño líder anterior en condiciones similares. Esto facilita maniobrar en esquinas pronunciadas mientras se mantienen bajas las cargas sobre los tejidos circundantes.
Probando el diseño en el mundo virtual
Para entender exactamente cómo se comportaría su endoscopio, los autores recurrieron primero a simulaciones por ordenador detalladas. Usando un método llamado análisis por elementos finitos, modelaron el cuerpo blando de silicona y su capa externa de fibra mientras se variaban las presiones de aire en las cámaras. Esto les permitió predecir cuánto se doblaría o torcería el dispositivo y verificar si el material se mantendría dentro de límites seguros. El equipo experimentó con distintas resoluciones de malla—qué tan finamente se divide el dispositivo para el cálculo—hasta que los resultados dejaron de cambiar de forma significativa, señal de que las predicciones eran estables. Estas simulaciones mostraron que ajustar qué cámaras se presurizan y en qué medida puede producir flexiones controladas en diferentes direcciones y, si se desea, torsión alrededor del eje central.
Dejar que la inteligencia artificial aprenda el movimiento
Ejecutar simulaciones tan detalladas para cada nuevo patrón de presión o modificación de diseño sería lento y costoso en términos computacionales. Para evitarlo, los investigadores construyeron un modelo de predicción basado en datos usando aprendizaje automático. Generaron cientos de casos de ejemplo en Python, cada uno describiendo una combinación única de presiones en las cinco cámaras y los movimientos de flexión y torsión resultantes. Se entrenaron dos tipos de algoritmos de aprendizaje—redes neuronales artificiales y máquinas de vectores de soporte—para mapear desde las presiones hasta cuatro resultados: ángulo de flexión, ángulo de torsión y la rapidez con que ocurre cada uno de estos movimientos. Tras limpiar y escalar los datos, el equipo entrenó y probó estos modelos, encontrando que ambos podían reproducir de forma cercana los resultados de las simulaciones, con la red neuronal rindiendo algo mejor en conjunto.
De la simulación al hardware real
Para confirmar que sus modelos virtuales coincidían con la realidad, los autores fabricaron moldes físicos con una impresora 3D y vertieron el cuerpo del endoscopio en una silicona muy elástica. Luego presurizaron las cámaras en pasos cuidadosamente controlados y midieron cuánto se doblaba el dispositivo real. Los ángulos de flexión experimentales siguieron de cerca las predicciones de las simulaciones, con pequeñas diferencias explicadas por variaciones naturales en la silicona y por las simplificaciones del modelo matemático. Repetir la misma prueba varias veces produjo ángulos de flexión casi idénticos, demostrando que el dispositivo se comporta de manera fiable. En un rango de presiones, el prototipo alcanzó una mayor flexión que diseños anteriores a presiones más seguras y bajas, validando tanto el concepto mecánico como las herramientas de predicción basadas en IA.
Qué significa esto para pacientes y cirujanos
En términos cotidianos, este trabajo nos acerca a herramientas quirúrgicas que se mueven más como la yema de un dedo suave que como un palo rígido. El nuevo endoscopio blando puede doblarse bruscamente manteniéndose dentro de límites de presión seguros, lo que ayuda a los cirujanos a alcanzar zonas ocultas o de difícil acceso con menor riesgo de lesión. El modelo de IA que lo acompaña actúa como una “tabla de consulta” rápida que informa a los diseñadores y, en el futuro, a los sistemas de control cómo responderá el endoscopio antes de moverse, sin necesidad de volver a ejecutar simulaciones pesadas cada vez. Con un desarrollo adicional—como conectar múltiples segmentos, añadir sensores en tiempo real y cerrar el lazo entre mediciones y control—esta combinación de robótica blanda e inteligencia artificial podría hacer que los procedimientos mínimamente invasivos sean más seguros, más precisos y accesibles para más pacientes.
Cita: Hani, M., Elghitany, M.N., Sweif, R. et al. Design of a soft robotic endoscope with enhanced bending and AI-based prediction. Sci Rep 16, 12878 (2026). https://doi.org/10.1038/s41598-026-46334-y
Palabras clave: endoscopio robótico blando, cirugía mínimamente invasiva, actuadores neumáticos blandos, robótica médica, modelado con inteligencia artificial