Clear Sky Science · tr
Geliştirilmiş bükülme ve AI tabanlı öngörüye sahip yumuşak robotik endoskop tasarımı
Hassas Delik Ameliyatları İçin Daha Nazik Aletler
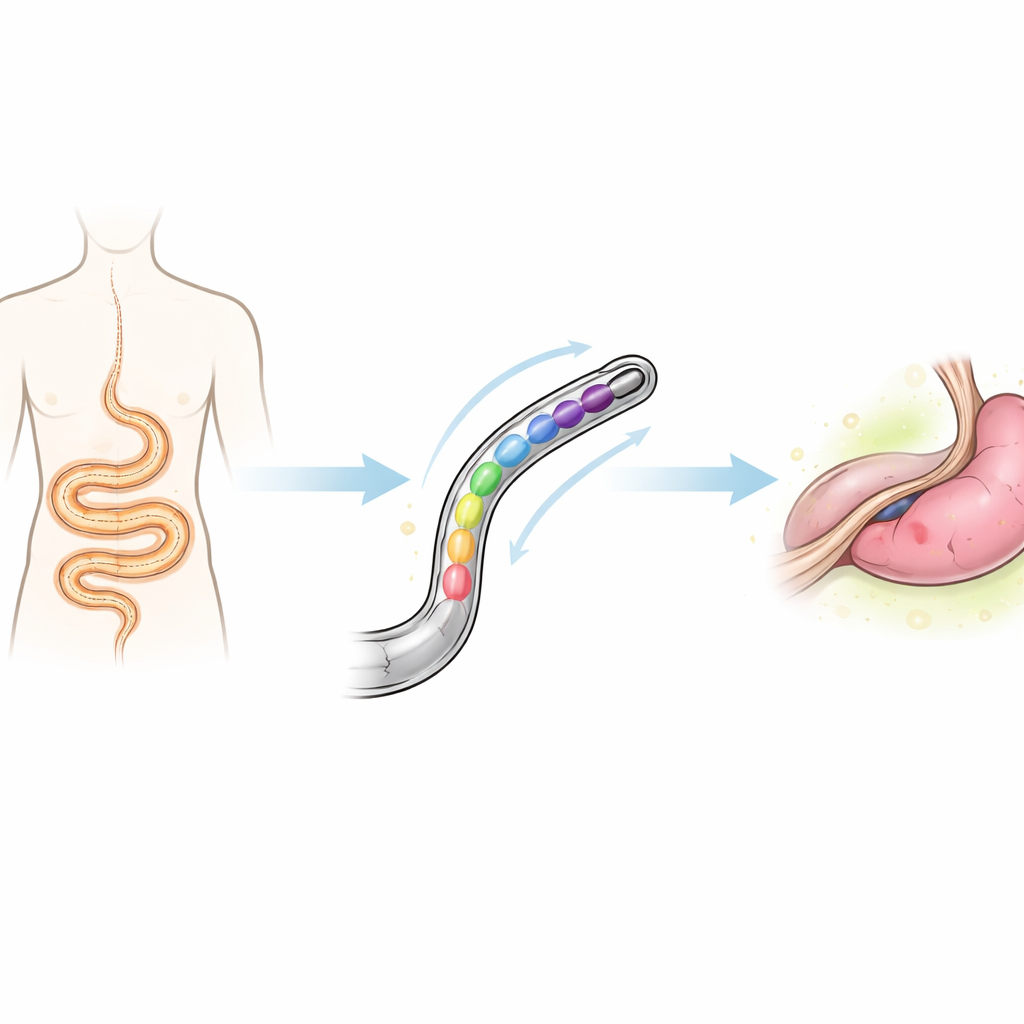
Günümüzün birçok ameliyatı artık büyük kesiler yerine küçük yarıklardan veya doğal açıklıklardan yapılıyor. Bu yaklaşıma minimal invaziv cerrahi denir ve hastaların daha az ağrı ile daha hızlı iyileşmesine yardımcı olur. Ancak bunun iyi işlemesi için, cerrahların vücutta kıvrımlı yollar boyunca zarar vermeden yönlendirebileceği uzun, yılan gibi aletlere ihtiyaç vardır. Bu makale, daha düşük iç basınçla daha kolay bükülen yeni bir yumuşak, esnek endoskop ve onun nasıl hareket edeceğini tahmin edebilen akıllı bir bilgisayar modeli sunuyor. Birlikte, hem hastalar için daha güvenli hem de cerrahlar için daha kolay kontrol edilebilir cerrahi aletlere doğru bir adımı işaret ediyorlar.
Geleneksel Skoplar Neden Yetersiz
Geleneksel endoskoplar iki uçta yer alır. Rijit olanlar güçlü ve hassastır, ancak vücudun derinliklerindeki dar kıvrımları aşmakta zorlanır. Çok esnek olanlar daha uzak noktalara ulaşabilir, ancak burkulma, halka oluşturma veya kontrol kaybı yaşayabilir; bu da cerrahların isabetli çalışmasını zorlaştırır. Yumuşak robotik endoskoplar, iç odacıkları basınçlandırıldığında pürüzsüz şekilde bükülen kauçuk benzeri malzemeler kullanarak her iki dünyanın en iyisini birleştirmeyi amaçlar. Yine de, mevcut tasarımların çoğu işe yarar bükülme elde etmek için nispeten yüksek basınca ihtiyaç duyar; bu da güvenlik endişelerini artırır: cihaz içindeki basınç kan basıncına yaklaşır veya onu aşarsa bir arıza dokuya zarar verebilir. Önceki tasarımlar ayrıca sürtünme, balonlama veya öngörülemez hareket sorunları yaşadı ve tasarım her değiştiğinde ağır bilgisayar simülasyonları gerektirdiler.
Yeni Bir Bükülme Gövdesi
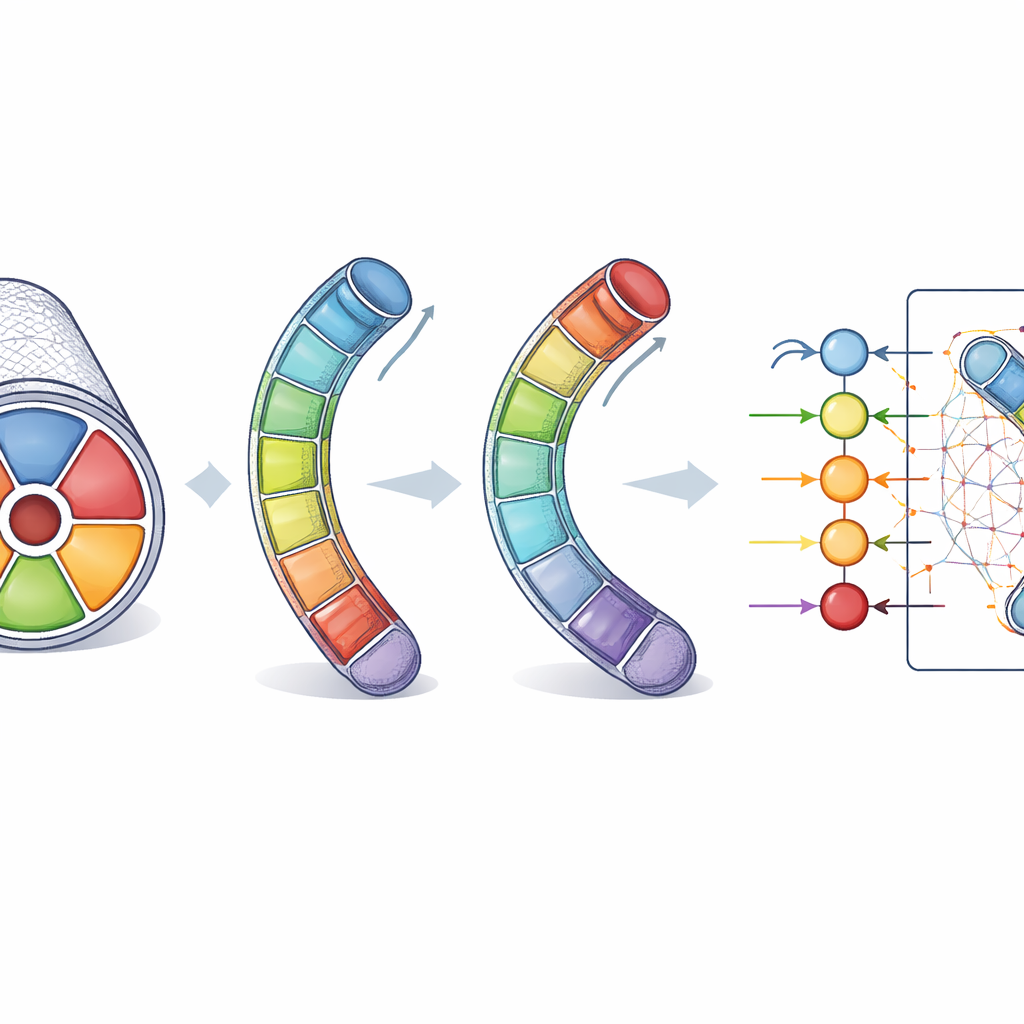
Araştırmacılar, merkez etrafında düzenlenmiş beş iç hava odacığına sahip kısa bir silindir biçiminde yeniden tasarlanmış bir yumuşak endoskop öneriyor. Her odacığın kesiti basit bir daire yerine yarım ay şeklindedir; bu, istenmeyen dışa doğru balonlamayı azaltırken daha güçlü bükülme üretmeye yardımcı olur. Cihazın etrafını saran hafif bir dış fiber kılıf, hava pompalandığında dışarı doğru balonlaşmayı önler ve şeklini sabit tutar. Odacıkların sayısını, şeklini ve yerleşimini dikkatle seçerek, ekip yaklaşık 90 dereceye varan bükülme açısına yalnızca 0.2 bar basınçla ulaşabilen bir modül yarattı—bu, tipik kan basıncının altında ve benzer koşullarda önde gelen önceki bir tasarıma göre yüzde 10’dan fazla daha iyi. Bu, çevresindeki dokular üzerindeki yükleri düşük tutarken keskin köşelerin etrafında yönlendirmeyi kolaylaştırır.
Tasarımın Sanal Dünyada Test Edilmesi
Endoskoplarının tam olarak nasıl davranacağını anlamak için yazarlar önce detaylı bilgisayar simülasyonlarına güvendiler. Sonlu elemanlar analizi adı verilen bir yöntemle, yumuşak silikon gövdeyi ve dış fiber katmanını modelleyip odacıklar içindeki hava basınçlarını değiştirdiler. Bu, cihazın ne kadar büküleceğini veya döneceğini öngörmelerine ve malzemenin güvenli sınırlar içinde kalıp kalmayacağını kontrol etmelerine olanak sağladı. Ekip, sonuçlar önemli ölçüde değişmeyene kadar cihazın hesaplama için ne kadar ince bir mesh ile bölündüğünü—yani ağ çözünürlüğünü—denedi; bu, tahminlerin kararlı olduğuna işaret eder. Bu simülasyonlar, hangi odacıkların ne kadar basınçlandırıldığı ayarlandığında farklı yönlerde kontrollü bükülme ve istenirse merkezi eksen etrafında burulma üretilebileceğini gösterdi.
Hareketi Yapay Zekâya Öğretmek
Her yeni basınç düzeni veya tasarım değişikliği için bu tür ayrıntılı simülasyonları çalıştırmak yavaş ve hesaplama açısından maliyetli olurdu. Bunu aşmak için, araştırmacılar makine öğrenmesi kullanarak veri odaklı bir tahmin modeli geliştirdiler. Python’da beş odacığın basınçlarının eşsiz kombinasyonlarını ve bunların yol açtığı bükülme ile burulma hareketlerini tanımlayan yüzlerce örnek ürettiler. İki tür öğrenme algoritması—yapay sinir ağları ve destek vektör makineleri—basınçlardan dört çıktıya: bükülme açısı, burulma açısı ve bu hareketlerin her birinin gerçekleşme hızlarına haritalamak üzere eğitildi. Veriler temizlenip ölçeklendirildikten sonra ekip bu modelleri eğitip test etti; her iki model de simülasyon sonuçlarını yakından tekrarlayabildi ve yapay sinir ağları genel olarak biraz daha iyi performans gösterdi.
Simülasyondan Gerçek Donanıma
Sanal modellerinin gerçeklikle uyumlu olduğunu doğrulamak için yazarlar 3B yazıcı ile fiziksel kalıplar üretti ve endoskop gövdesini çok esnek bir silikonla döktü. Ardından odacıkları dikkatle kontrol edilen adımlarla basınçlandırıp gerçek cihazın ne kadar büküldüğünü ölçtüler. Deneysel bükülme açıları simülasyon öngörüleriyle yakından eşleşti; küçük farklılıklar silikonun doğal değişkenlikleri ve matematiksel modelin basitleştirmeleri ile açıklanıyordu. Aynı testi birkaç kez tekrarlamak neredeyse aynı bükülme açılarını verdi ve cihazın güvenilir davrandığını gösterdi. Bir basınç aralığında prototip, daha önceki tasarımlara kıyasla daha güvenli, daha düşük basınçlarda daha yüksek bükülme elde etti; bu da hem mekanik konseptin hem de AI tabanlı tahmin araçlarının doğrulanmasını sağladı.
Bu Hastalar ve Cerrahlar İçin Ne Anlama Geliyor
Günlük ifadeyle, bu çalışma bizi sert bir çubuk yerine nazik bir parmak ucu gibi hareket eden cerrahi aletlere yaklaştırıyor. Yeni yumuşak endoskop, güvenli basınç sınırları içinde kavisli bükülmeler yaparak cerrahların gizli veya ulaşılması zor bölgelere daha düşük yaralanma riskiyle ulaşmasına yardımcı oluyor. Eşlik eden AI modeli, tasarımcılara ve gelecekte kontrol sistemlerine, kapsam hareket etmeden önce ağır simülasyonları yeniden çalıştırmadan cihazın nasıl tepki vereceğini söyleyen hızlı bir ‘‘bak-kopyala’’ tablosu gibi davranıyor. Birden çok segmentin bağlanması, gerçek zamanlı algılama eklenmesi ve ölçümler ile kontrol arasında kapalı döngü kurulması gibi daha ileri geliştirmelerle, bu yumuşak robotik ve yapay zekâ kombinasyonu minimal invaziv işlemleri daha güvenli, daha hassas ve daha geniş hastalara erişilebilir hale getirebilir.
Atıf: Hani, M., Elghitany, M.N., Sweif, R. et al. Design of a soft robotic endoscope with enhanced bending and AI-based prediction. Sci Rep 16, 12878 (2026). https://doi.org/10.1038/s41598-026-46334-y
Anahtar kelimeler: yumuşak robotik endoskop, minimally invasive surgery, pnömatik yumuşak aktuatuarlar, tıbbi robotik, yapay zeka modelleme