Clear Sky Science · nl
Ontwerp van een zachte robotische endoscoop met verbeterde buiging en AI-gebaseerde voorspelling
Zachtere instrumenten voor kijkoperaties
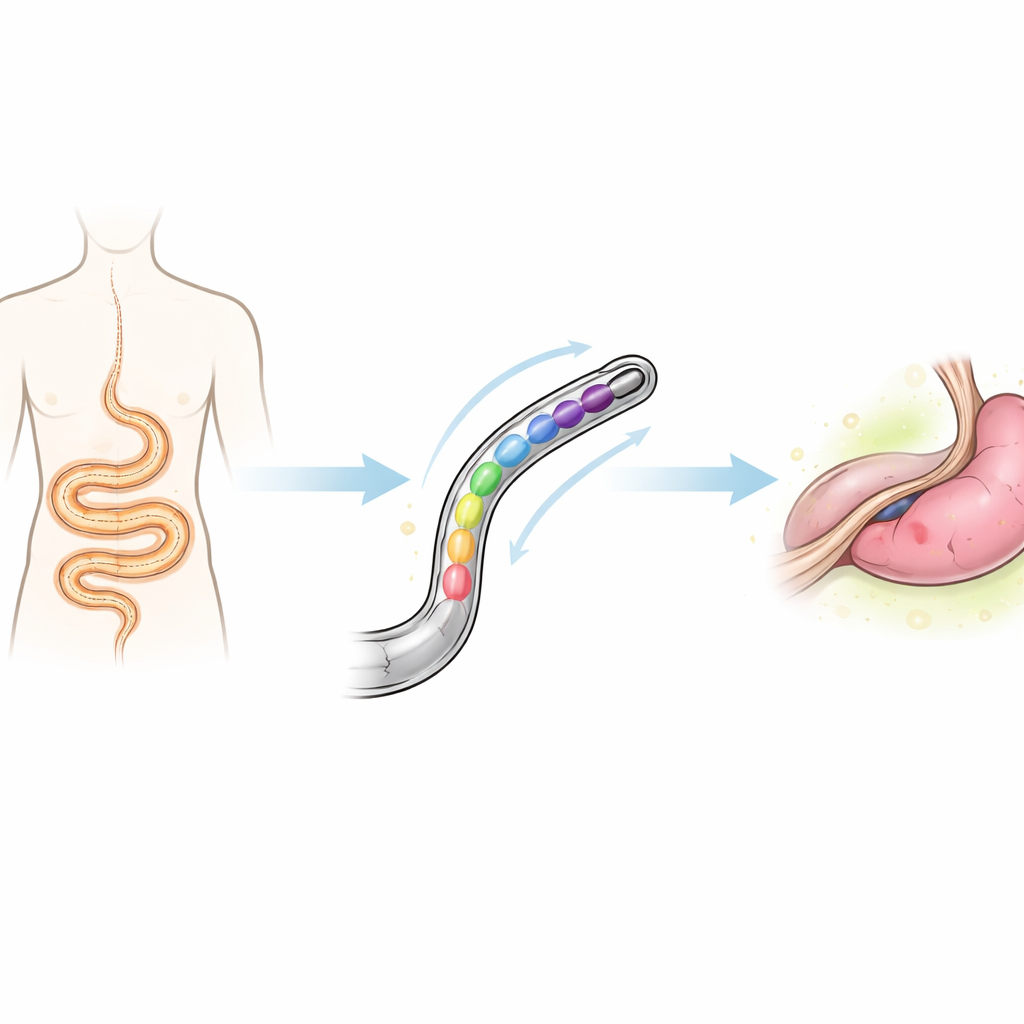
Veel moderne operaties worden nu uitgevoerd via kleine incisies of natuurlijke openingen in plaats van grote sneden. Deze aanpak, minimaal invasieve chirurgie genoemd, helpt patiënten sneller te herstellen met minder pijn. Maar om het goed te laten werken hebben artsen lange, slangachtige instrumenten nodig die zich door de kronkelige paden van het lichaam kunnen sturen zonder kwetsbaar weefsel te beschadigen. Dit artikel introduceert een nieuw type zachte, flexibele endoscoop die gemakkelijker buigt bij lagere interne druk, samen met een slim computermodel dat kan voorspellen hoe hij zal bewegen. Samen wijzen ze op chirurgische instrumenten die zowel veiliger voor patiënten als eenvoudiger voor chirurgen te hanteren zijn.
Waarom traditionele scopes tekortschieten
Conventionele endoscopen zitten op twee uitersten. Starre exemplaren zijn sterk en precies maar hebben moeite om scherpe bochten diep in het lichaam te passeren. Zeer flexibele instrumenten kunnen verder reiken maar kunnen knikken, lussen vormen of controle verliezen, waardoor het voor chirurgen moeilijker wordt om nauwkeurig te werken. Zachte robotische endoscopen proberen het beste van beide werelden te combineren door rubberachtige materialen te gebruiken die soepel buigen wanneer hun interne kamers worden opgepompt. Toch hebben veel huidige ontwerpen relatief hoge druk nodig om nuttige buiging te bereiken, wat veiligheidszorgen oproept: als de druk in het apparaat de bloeddruk benadert of overschrijdt, kan een storing weefsel beschadigen. Eerdere ontwerpen leden ook onder wrijving, ballonvorming of onvoorspelbare bewegingen, en vereisten vaak zware computersimulaties telkens als het ontwerp veranderde.
Een nieuw buiglichaam
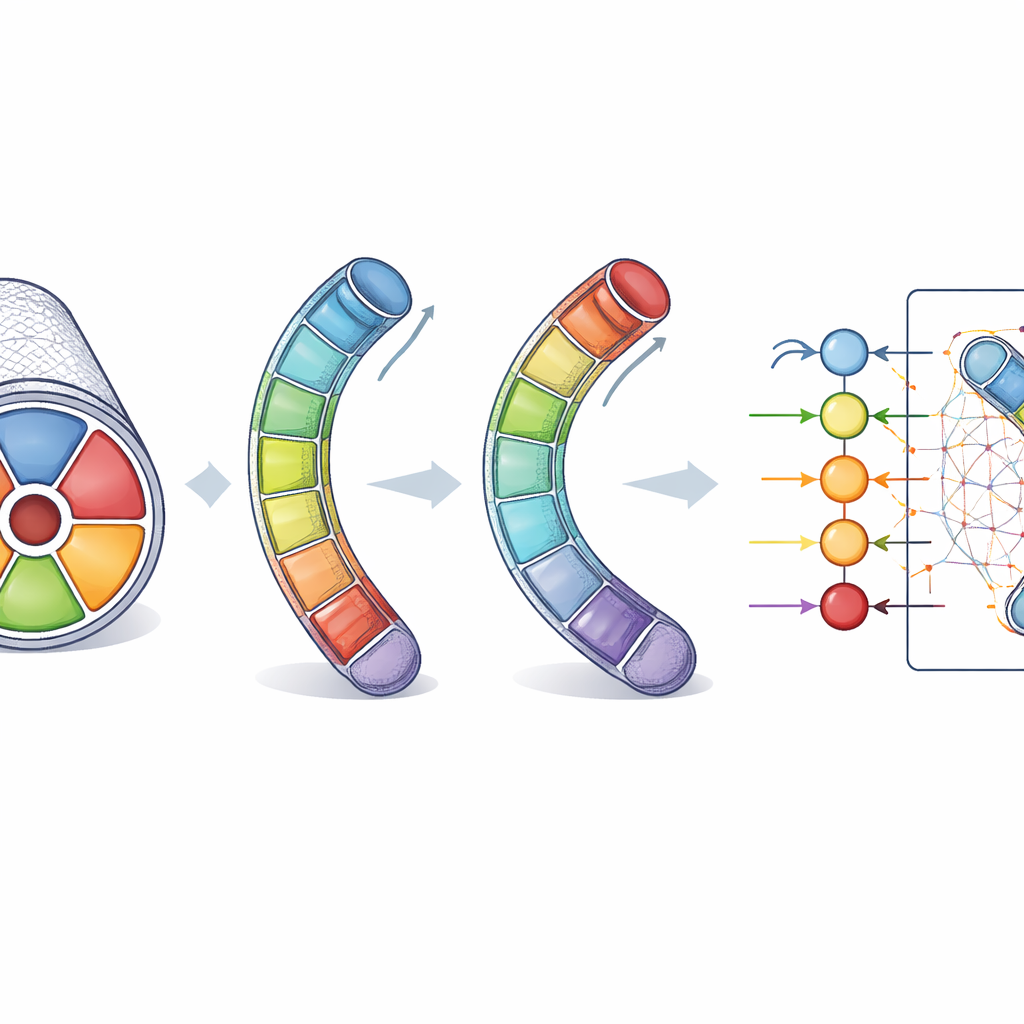
De onderzoekers stellen een herontworpen zachte endoscoop voor, gevormd als een korte cilinder met vijf interne luchtkamers rond het midden. Elke kamer heeft een halvemaanvormige doorsnede in plaats van een simpele cirkel, wat helpt sterkere buiging te genereren met minder ongewenste uitzetting. Een lichte buitenmantel van vezels omhult het apparaat, voorkomt dat het naar buiten opbolt wanneer lucht wordt gepompt en houdt de vorm stabiel. Door zorgvuldig het aantal, de vorm en de plaatsing van de kamers te kiezen, creëerde het team een module die een buighoek van ongeveer 90 graden kan bereiken met slechts 0,2 bar druk — lager dan de gebruikelijke bloeddruk en meer dan 10 procent beter dan een toonaangevend eerder ontwerp onder vergelijkbare omstandigheden. Dit maakt het eenvoudiger om scherpe hoeken te nemen terwijl de belasting op het omringende weefsel laag blijft.
Het ontwerp testen in de virtuele wereld
Om precies te begrijpen hoe hun endoscoop zich zou gedragen, vertrouwden de auteurs eerst op gedetailleerde computersimulaties. Met behulp van een methode die eindige-elementen-analyse wordt genoemd, modelleerden ze het zachte siliciumlichaam en de buitenste vezellaag terwijl de luchtdruk in de kamers varieerde. Dit stelde hen in staat te voorspellen hoeveel het apparaat zou buigen of draaien en te controleren of het materiaal binnen veilige grenzen bleef. Het team experimenteerde met verschillende mesh-resoluties — hoe fijn het apparaat wordt opgedeeld voor berekening — totdat de resultaten niet meer significant veranderden, een teken dat de voorspellingen stabiel waren. Deze simulaties toonden aan dat het aanpassen van welke kamers worden geïnflateerd, en in welke mate, gecontroleerde buiging in verschillende richtingen kan produceren en, indien gewenst, torsie rond de centrale as.
Kunstmatige intelligentie laten leren hoe het beweegt
Het uitvoeren van zulke gedetailleerde simulaties voor elk nieuw drukpatroon of ontwerpwijziging zou traag en rekenkundig kostbaar zijn. Om dit te omzeilen bouwden de onderzoekers een data-gedreven voorspellingsmodel met behulp van machine learning. Ze genereerden honderden voorbeeldgevallen in Python, elk met een unieke combinatie van drukken in de vijf kamers en de resulterende buig- en draaimomenten. Twee typen leeralgoritmen — kunstmatige neurale netwerken en support vector machines — werden getraind om van drukken naar vier uitkomsten te gaan: buighoek, draaihock, en hoe snel elk van deze bewegingen optreedt. Na het opschonen en schalen van de gegevens trainde en testte het team deze modellen, en bleek dat beide de simulatieresultaten nauwkeurig konden reproduceren, waarbij het neurale netwerk overall iets beter presteerde.
Van simulatie naar echte hardware
Om te bevestigen dat hun virtuele modellen overeenkwamen met de werkelijkheid, maakten de auteurs fysieke mallen met een 3D-printer en goten het endoscooplichaam in zeer rekbaar silicium. Ze drukten vervolgens de kamers gecontroleerd op in stappen en maten hoeveel het echte apparaat boog. De experimentele buighoeken volgden de simulatievoorspellingen nauw, met kleine verschillen die verklaard werden door natuurlijke variaties in het silicium en de vereenvoudigingen in het wiskundige model. Het herhalen van dezelfde test meerdere keren leverde vrijwel identieke buighoeken op, wat aantoont dat het apparaat betrouwbaar gedraagt. Over een reeks drukken behaalde het prototype grotere buiging dan eerdere ontwerpen bij veiliger, lagere drukken, waarmee zowel het mechanische concept als de AI-gebaseerde voorspellingsinstrumenten werden gevalideerd.
Wat dit betekent voor patiënten en chirurgen
In gewone woorden brengt dit werk ons dichter bij chirurgische instrumenten die zich meer gedragen als een zachte vingertop dan als een stijve stok. De nieuwe zachte endoscoop kan scherp buigen terwijl hij binnen veilige druklimieten blijft, waardoor chirurgen verborgen of moeilijk bereikbare gebieden bereiken met minder risico op letsel. Het bijbehorende AI-model werkt als een snelle "naslagtabel" die ontwerpers en in de toekomst regelingssystemen vertelt hoe de scop zal reageren voordat deze beweegt, zonder telkens zware simulaties te hoeven herhalen. Met verdere ontwikkeling — zoals het koppelen van meerdere segmenten, het toevoegen van realtime sensoring en het sluiten van de lus tussen meting en sturing — zou deze combinatie van zachte robotica en kunstmatige intelligentie minimaal invasieve ingrepen veiliger, preciezer en voor meer patiënten beschikbaar kunnen maken.
Bronvermelding: Hani, M., Elghitany, M.N., Sweif, R. et al. Design of a soft robotic endoscope with enhanced bending and AI-based prediction. Sci Rep 16, 12878 (2026). https://doi.org/10.1038/s41598-026-46334-y
Trefwoorden: zachte robotische endoscoop, minimaal invasieve chirurgie, pneumatische zachte actuatoren, medische robotica, kunstmatige intelligentie modellering