Clear Sky Science · ja
曲げ性能を高め、AIによる予測を組み合わせたソフトロボティクス内視鏡の設計
キーホール手術のためのより優しい器具
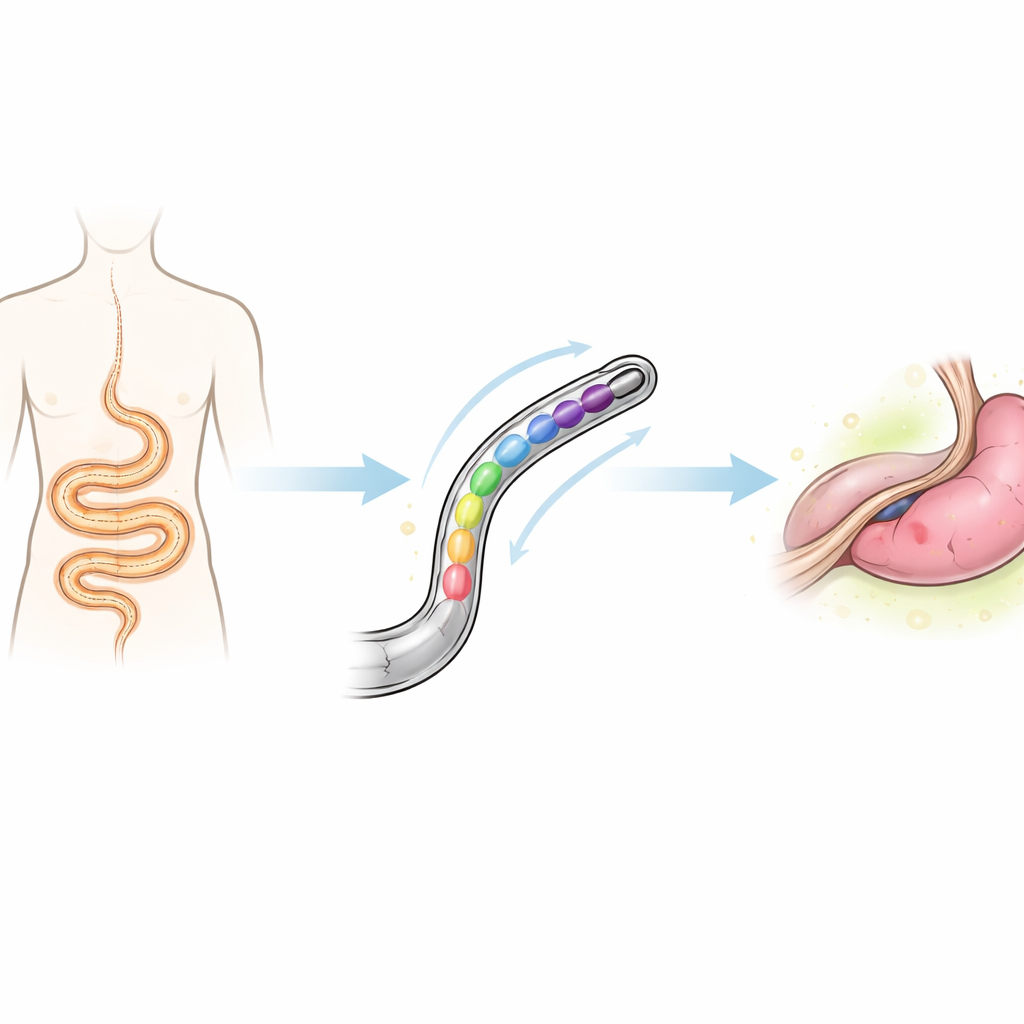
現代の多くの手術は、大きな切開ではなく小さな切り口や自然の開口部から行われることが増えています。低侵襲手術と呼ばれるこの手法は、患者の回復を早め、痛みを減らします。しかし有効に行うには、医師が体内の曲がりくねった通路を傷つけずに進める、長く蛇のように曲がる器具が必要です。本論文は、より低い内部圧力で容易に曲がる新しいタイプの柔軟なソフト内視鏡と、その動作を予測するスマートな計算モデルを紹介します。両者を組み合わせることで、患者にとってより安全で、外科医が操作しやすい手術器具への道が開かれます。
従来の内視鏡が抱える問題点
従来の内視鏡は二つの極に位置しています。剛性の高いものは強度と精度を持ちますが、体内の深い狭い曲がりを通るのは苦手です。非常に柔らかいものは到達範囲が広い反面、座屈やループ、制御の喪失が起きやすく、外科医が正確に操作するのを難しくします。ソフトロボティクス内視鏡は、内部室が加圧されると滑らかに曲がるゴム状材料を使い、両者の利点を組み合わせようとします。それでも、多くの現行設計は有用な曲げを得るために比較的高い圧力を必要とし、そのことが安全性の懸念を生みます:装置内部の圧力が血圧に近づくかそれを超えると、故障が組織に損傷を与える可能性があります。以前の設計は摩擦、風船状の膨らみ、予測不能な動作にも悩まされ、設計を変えるたびに重い数値シミュレーションが必要になることが多いという問題もありました。
新しい曲げ用本体設計
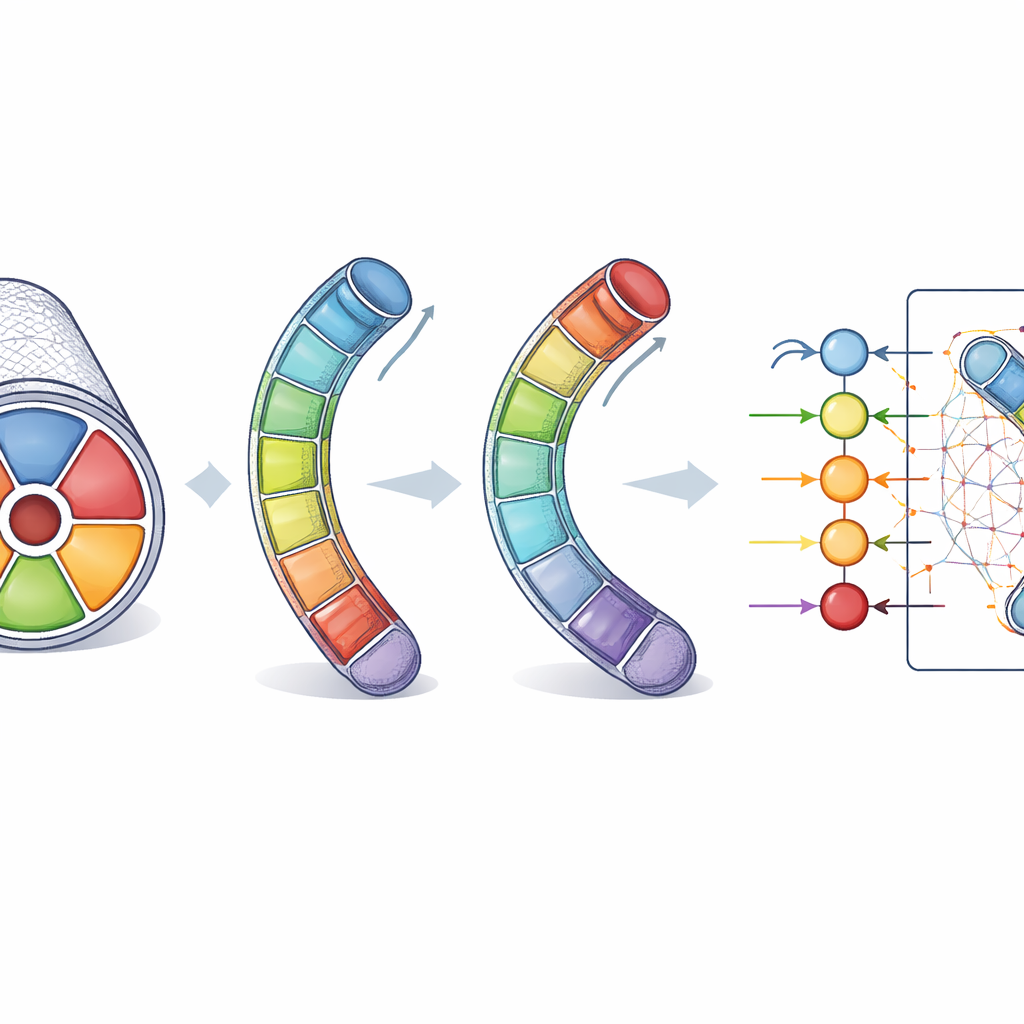
研究者らは、短い円筒形で中心を囲むように5つの内部気室を配した再設計されたソフト内視鏡を提案します。各気室は単純な円形ではなく半月形の断面を持ち、不要な膨らみを抑えつつより強い曲げを生み出します。軽量の外側ファイバー被覆が装置を包み、空気を入れた際の外側への膨張を防ぎ形状を安定させます。気室の数、形状、配置を慎重に選ぶことで、同等条件の既存の代表的設計よりも約10%以上優れた性能で、約0.2 barという低圧で約90度の曲げ角を達成するモジュールを作り上げました。この圧力は典型的な血圧より低く、鋭いコーナーをより安全に操舵することが可能になります。
仮想環境での設計検証
内視鏡が実際にどのように振る舞うかを正確に把握するため、著者らはまず詳細なコンピュータシミュレーションに頼りました。有限要素解析と呼ばれる手法を用いて、ソフトシリコーン本体と外側ファイバー層をモデル化し、気室内の空気圧を変化させながら解析しました。これにより装置がどの程度曲がるかねじれるかを予測し、材料が安全な範囲にとどまるかを確認できます。メッシュ解像度(計算のためにどれだけ細かく分割するか)を変えて実験し、結果が大きく変化しなくなるまで調整することで、予測の安定性を確かめました。これらのシミュレーションは、どの気室にどれだけ加圧するかを調整することで、異なる方向への制御された曲げや、必要に応じて中心軸まわりのねじりが得られることを示しました。
動作を学習する人工知能
設計を変えるたびにこうした詳細なシミュレーションを回すのは遅く計算コストが高くつきます。これを克服するために、研究者らは機械学習を用いたデータ駆動型の予測モデルを構築しました。Pythonで数百の事例を生成し、それぞれが5つの気室に対する圧力の組み合わせと、その結果としての曲げおよびねじれの動作を記述しています。人工ニューラルネットワークとサポートベクターマシンという二種類の学習アルゴリズムを用いて、圧力から4つの出力(曲げ角、ねじれ角、そしてこれらの動作が発生する速さ)への写像を学習させました。データの前処理(クリーニングとスケーリング)の後、モデルを訓練・評価したところ、両モデルともシミュレーション結果を高い精度で再現でき、ニューラルネットワークが全体的にわずかに優れていました。
シミュレーションから実機へ
仮想モデルが現実と一致するかを確認するため、著者らは3Dプリンタで物理的な金型を作り、非常に伸縮性の高いシリコーンで内視鏡本体を鋳造しました。次に気室に対して制御された段階的な加圧を行い、実際の装置がどの程度曲がるかを計測しました。実験で得られた曲げ角はシミュレーションの予測に近く、シリコーンの自然なばらつきや数学モデルの単純化で説明できる小さな差異が見られました。同一試験を複数回繰り返してもほぼ同一の曲げ角が得られ、装置の挙動が信頼できることを示しました。幅広い圧力範囲で、試作機はより安全で低い圧力下で従来設計よりも高い曲げを達成し、機械的コンセプトとAIベースの予測手法の両方を実証しました。
患者と外科医にとっての意義
平たく言えば、この研究は剛性の棒ではなく、やわらかな指先のように動く手術器具に近づけるものです。新しいソフト内視鏡は安全な圧力限界内で鋭く曲がることができ、外科医が見えにくい・到達しにくい領域へ低い損傷リスクで到達するのを助けます。付随するAIモデルは、設計者や将来の制御システムに対して、重いシミュレーションを毎回走らせることなく装置の反応を即座に示す高速な「参照表」のように機能します。さらなる発展として、複数セグメントの連結、リアルタイムセンシングの追加、測定と制御のフィードバックループの実装などが進めば、ソフトロボティクスと人工知能の組み合わせは、低侵襲手術をより安全で精密にし、より多くの患者に提供できるようになる可能性があります。
引用: Hani, M., Elghitany, M.N., Sweif, R. et al. Design of a soft robotic endoscope with enhanced bending and AI-based prediction. Sci Rep 16, 12878 (2026). https://doi.org/10.1038/s41598-026-46334-y
キーワード: ソフトロボティクス内視鏡, 低侵襲手術, 空気圧式ソフトアクチュエータ, 医療ロボティクス, 人工知能モデリング