Clear Sky Science · it
Progettazione di un endoscopio robotico morbido con flessione migliorata e previsione basata su IA
Strumenti più delicati per la chirurgia a foro
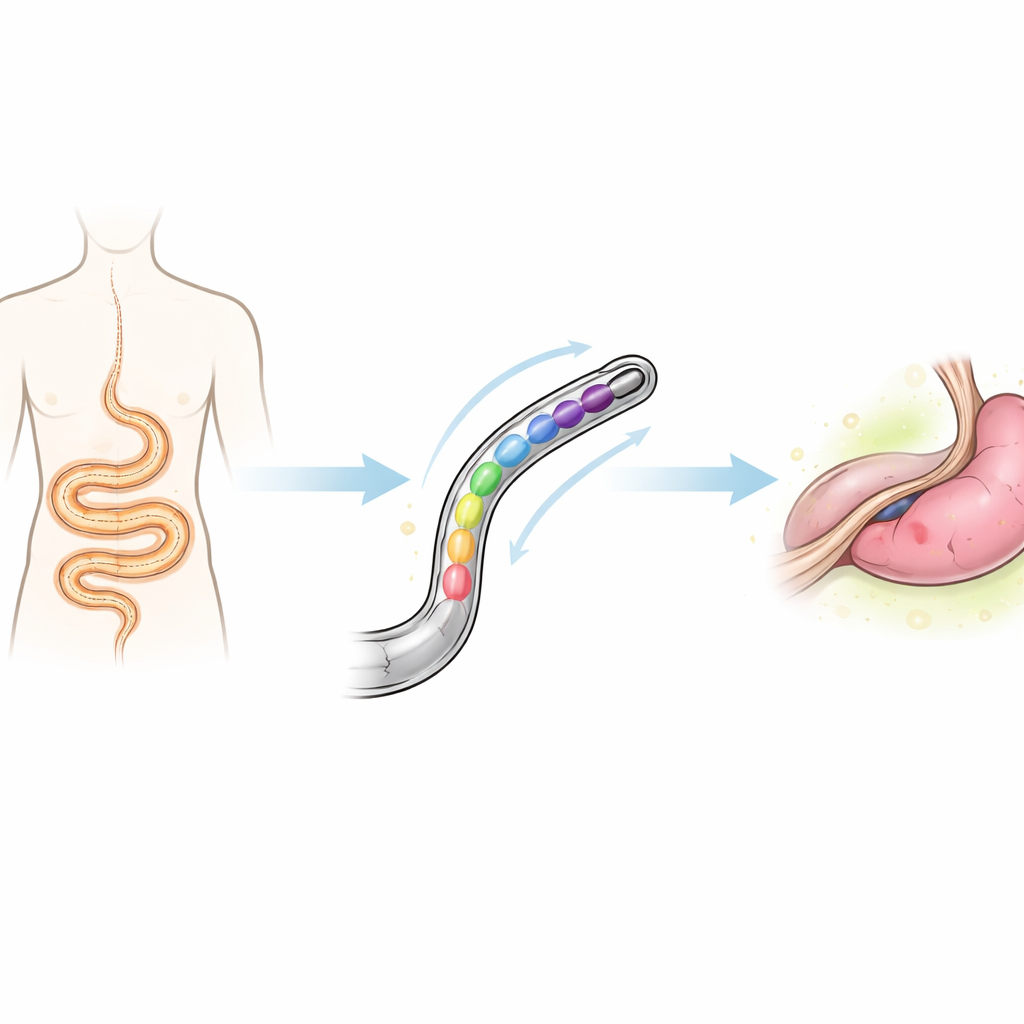
Molti interventi moderni vengono ormai eseguiti attraverso piccole incisioni o aperture naturali invece di tagli estesi. Questo approccio, chiamato chirurgia minimamente invasiva, aiuta i pazienti a recuperare più rapidamente con meno dolore. Ma per funzionare bene, i medici hanno bisogno di strumenti lunghi e simili a serpenti in grado di orientarsi attraverso i percorsi tortuosi del corpo senza danneggiare i tessuti delicati. In questo articolo viene presentato un nuovo tipo di endoscopio morbido e flessibile che si piega più facilmente con pressioni interne inferiori, insieme a un modello computazionale intelligente in grado di prevederne il movimento. Insieme, indicano la strada verso strumenti chirurgici più sicuri per i pazienti e più facili da controllare per i chirurghi.
Perché gli endoscopi tradizionali non sono sufficienti
Gli endoscopi convenzionali si collocano a due estremi. Quelli rigidi sono robusti e precisi ma faticano a percorrere curve strette in profondità nel corpo. Quelli molto flessibili possono arrivare più lontano ma possono anche piegarsi eccessivamente, formare anse o perdere il controllo, rendendo più difficile il lavoro del chirurgo. Gli endoscopi robotici morbidi cercano di combinare il meglio di entrambi gli approcci usando materiali simili alla gomma che si piegano in modo uniforme quando le camere interne vengono pressurizzate. Tuttavia, molti progetti attuali richiedono pressioni relativamente elevate per ottenere una flessione utile, il che solleva problemi di sicurezza: se la pressione all’interno del dispositivo si avvicina o supera la pressione sanguigna, un guasto potrebbe danneggiare i tessuti. I progetti precedenti soffrivano anche di attrito, rigonfiamento incontrollato o movimenti imprevedibili e spesso richiedevano costose simulazioni al computer ogni volta che il progetto veniva modificato.
Un nuovo corpo per la flessione
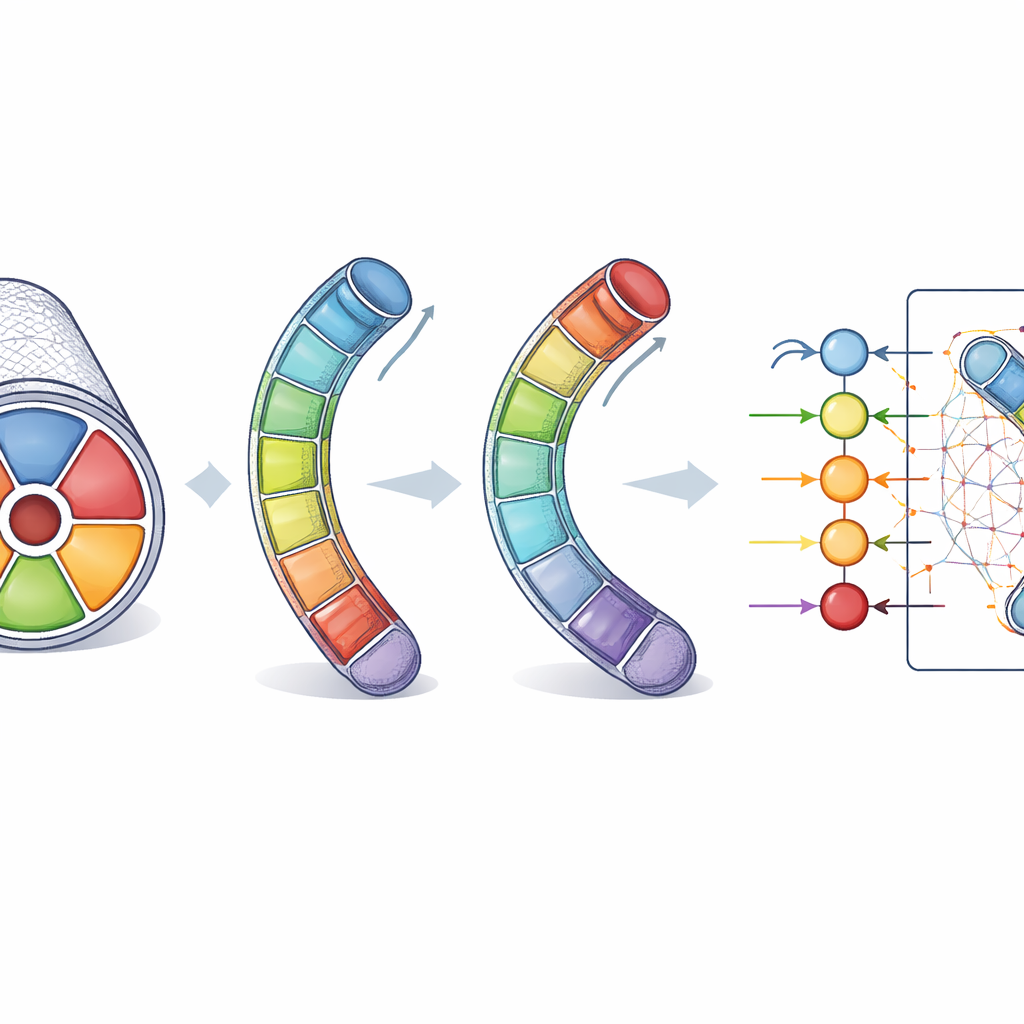
I ricercatori propongono un endoscopio morbido ridisegnato a forma di cilindro corto con cinque camere d’aria interne disposte attorno al centro. Ciascuna camera ha una sezione trasversale a mezzaluna anziché un semplice cerchio, il che aiuta a generare una flessione più efficace con meno rigonfiamento indesiderato. Una leggera guaina esterna in fibra avvolge il dispositivo, impedendone il rigonfiamento verso l’esterno quando viene insufflata aria e mantenendone stabile la forma. Scegliendo con cura numero, forma e posizione delle camere, il team ha creato un modulo in grado di raggiungere un angolo di flessione di circa 90 gradi usando solo 0,2 bar di pressione—inferiore alla tipica pressione arteriosa e oltre il 10% migliore rispetto a un importante progetto precedente in condizioni simili. Ciò facilita l’aggiramento di angoli acuti mantenendo basse le sollecitazioni sui tessuti circostanti.
Testare il progetto nel mondo virtuale
Per comprendere esattamente come si sarebbe comportato il loro endoscopio, gli autori si sono inizialmente affidati a dettagliate simulazioni al computer. Utilizzando un metodo chiamato analisi agli elementi finiti, hanno modellato il corpo morbido in silicone e il suo strato esterno in fibra mentre variavano le pressioni d’aria nelle camere. Questo ha permesso di prevedere quanto il dispositivo si sarebbe piegato o torceso e di verificare se il materiale sarebbe rimasto entro limiti di sicurezza. Il team ha sperimentato diverse risoluzioni della mesh—quanto finemente il dispositivo viene suddiviso per i calcoli—fino a quando i risultati non sono cambiati in modo significativo, segnale che le previsioni erano stabili. Queste simulazioni hanno mostrato che modulando quali camere vengono pressurizzate e di quanto, si possono ottenere piegamenti controllati in diverse direzioni e, se desiderato, torsioni attorno all’asse centrale.
Lasciare che l’intelligenza artificiale apprenda il moto
Eseguire simulazioni così dettagliate per ogni nuovo schema di pressione o modifica del progetto sarebbe lento e costoso in termini di calcolo. Per ovviare a ciò, i ricercatori hanno costruito un modello predittivo basato sui dati usando l’apprendimento automatico. Hanno generato centinaia di casi di esempio in Python, ciascuno descrivente una combinazione unica di pressioni nelle cinque camere e i corrispondenti movimenti di flessione e torsione. Due tipi di algoritmi di apprendimento—reti neurali artificiali e macchine a vettori di supporto—sono stati addestrati a mappare dalle pressioni a quattro risultati: angolo di flessione, angolo di torsione e la velocità con cui ciascuno di questi movimenti avviene. Dopo aver ripulito e normalizzato i dati, il team ha addestrato e testato questi modelli, riscontrando che entrambi riuscivano a riprodurre da vicino i risultati delle simulazioni, con la rete neurale leggermente più performante nel complesso.
Dalla simulazione all’hardware reale
Per confermare che i loro modelli virtuali corrispondessero alla realtà, gli autori hanno stampato in 3D stampi fisici e hanno colato il corpo dell’endoscopio in un silicone molto elastico. Hanno quindi pressurizzato le camere in passi controllati e misurato quanto il dispositivo reale si piegasse. Gli angoli di flessione sperimentali hanno seguito da vicino le previsioni delle simulazioni, con piccole differenze spiegabili dalle variazioni naturali del silicone e dalle semplificazioni del modello matematico. Ripetere lo stesso test più volte ha prodotto angoli di flessione quasi identici, dimostrando che il dispositivo si comporta in modo affidabile. Su un’ampia gamma di pressioni, il prototipo ha ottenuto angoli di flessione superiori rispetto ai progetti precedenti a pressioni più sicure e più basse, validando sia il concetto meccanico sia gli strumenti predittivi basati su IA.
Cosa significa per pazienti e chirurghi
In termini pratici, questo lavoro ci avvicina a strumenti chirurgici che si muovono più come una punta di dito delicata che come un’asta rigida. Il nuovo endoscopio morbido può piegarsi nettamente restando entro limiti di pressione sicuri, aiutando i chirurghi a raggiungere aree nascoste o difficili da accedere con minor rischio di lesione. Il modello di IA associato funziona come una veloce "tabella di consultazione" che indica ai progettisti e, in futuro, ai sistemi di controllo come lo strumento risponderà prima che si muova, senza dover rieseguire pesanti simulazioni ogni volta. Con ulteriori sviluppi—come il collegamento di più segmenti, l’aggiunta di sensing in tempo reale e la chiusura del ciclo tra misure e controllo—questa combinazione di robotica morbida e intelligenza artificiale potrebbe rendere le procedure minimamente invasive più sicure, più precise e accessibili a un maggior numero di pazienti.
Citazione: Hani, M., Elghitany, M.N., Sweif, R. et al. Design of a soft robotic endoscope with enhanced bending and AI-based prediction. Sci Rep 16, 12878 (2026). https://doi.org/10.1038/s41598-026-46334-y
Parole chiave: endoscopio robotico morbido, chirurgia minimamente invasiva, attuatori morbidi pneumatici, robotica medicale, modellazione con intelligenza artificiale