Clear Sky Science · pt
Projeto de um endoscópio robótico macio com maior capacidade de flexão e predição baseada em IA
Ferramentas mais delicadas para cirurgia por orifício
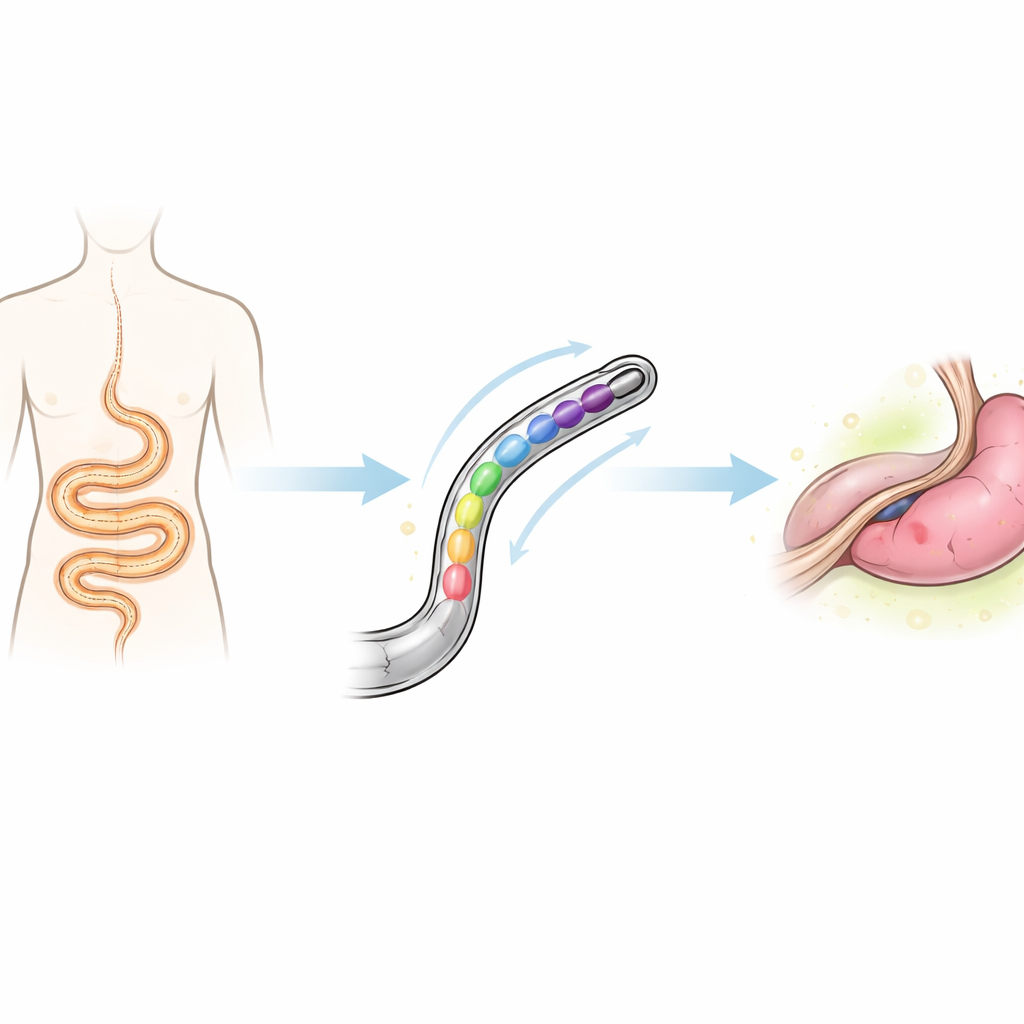
Muitas cirurgias modernas são realizadas por pequenos cortes ou aberturas naturais em vez de incisões grandes. Essa abordagem, chamada cirurgia minimamente invasiva, ajuda os pacientes a se recuperarem mais rápido e com menos dor. Mas, para que funcione bem, os médicos precisam de instrumentos longos e semelhantes a serpentes que possam se guiar pelos caminhos sinuosos do corpo sem ferir tecidos delicados. Este artigo apresenta um novo tipo de endoscópio macio e flexível que se curva com mais facilidade sob pressão interna mais baixa, junto com um modelo computacional inteligente capaz de prever como ele se moverá. Juntos, eles apontam para instrumentos cirúrgicos que são tanto mais seguros para os pacientes quanto mais fáceis de controlar pelos cirurgiões.
Por que os endoscópios tradicionais são insuficientes
Endoscópios convencionais situam-se em dois extremos. Os rígidos são robustos e precisos, mas têm dificuldade para navegar curvas apertadas em regiões profundas do corpo. Os muito flexíveis alcançam áreas mais distantes, mas podem sofrer flambagem, formar laços ou perder controle, dificultando o trabalho preciso do cirurgião. Endoscópios robóticos macios tentam combinar o melhor dos dois mundos ao usar materiais elásticos que se dobram suavemente quando suas câmaras internas são pressurizadas. Ainda assim, muitos projetos atuais exigem pressão relativamente alta para obter flexão útil, o que eleva preocupações de segurança: se a pressão dentro do dispositivo se aproximar ou exceder a pressão arterial, uma falha poderia danificar tecidos. Projetos anteriores também sofriam com atrito, expansão indesejada (balonamento) ou movimento imprevisível, e frequentemente exigiam simulações computacionais pesadas cada vez que o projeto mudava.
Um novo corpo de flexão
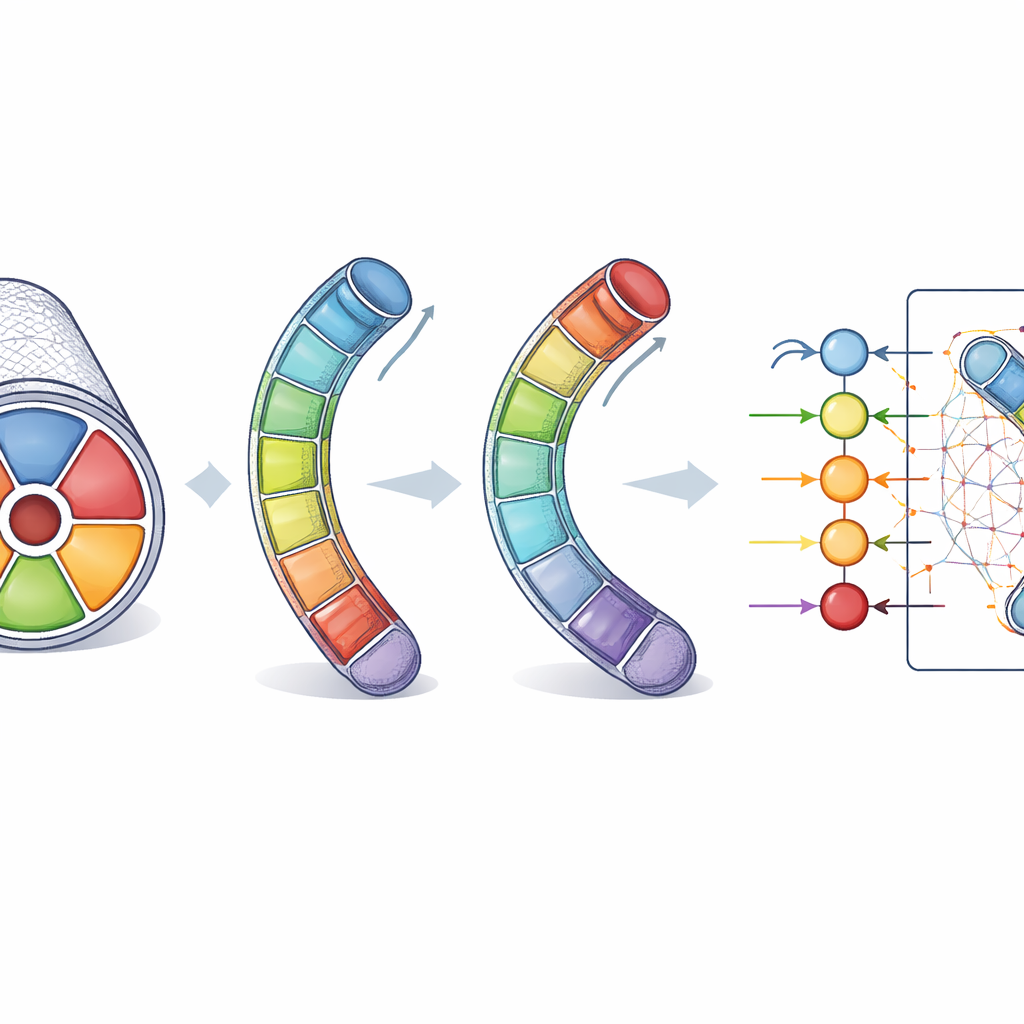
Os pesquisadores propõem um endoscópio macio redesenhado em forma de cilindro curto com cinco câmaras de ar internas dispostas ao redor do centro. Cada câmara possui seção transversal em meia-lua em vez de um círculo simples, o que ajuda a gerar flexão mais forte com menos inchaço indesejado. Uma bainha externa leve de fibras envolve o dispositivo, impedindo que ele se expanda para fora quando o ar é insuflado e mantendo sua forma estável. Ao escolher cuidadosamente o número, a forma e a posição das câmaras, a equipe criou um módulo capaz de atingir um ângulo de flexão de aproximadamente 90 graus usando apenas 0,2 bar de pressão — inferior à pressão arterial típica e mais de 10% melhor que um projeto líder anterior em condições semelhantes. Isso facilita a curva em cantos acentuados mantendo baixas as cargas sobre os tecidos circundantes.
Testando o projeto no mundo virtual
Para entender exatamente como o endoscópio se comportaria, os autores primeiro confiaram em simulações computacionais detalhadas. Usando um método chamado análise por elementos finitos, modelaram o corpo de silicone macio e sua camada externa de fibras enquanto as pressões nas câmaras variavam. Isso permitiu prever quanto o dispositivo se dobraria ou torceria e verificar se o material permaneceria dentro de limites seguros. A equipe testou diferentes resoluções de malha — quão finamente o dispositivo é subdividido para cálculo — até que os resultados não mudassem significativamente, sinal de que as previsões eram estáveis. Essas simulações mostraram que ajustar quais câmaras são pressurizadas, e em que intensidade, pode produzir flexão controlada em diferentes direções e, se desejado, torção em torno do eixo central.
Deixar a inteligência artificial aprender o movimento
Executar simulações tão detalhadas para cada novo padrão de pressão ou ajuste de projeto seria lento e custoso computacionalmente. Para superar isso, os pesquisadores construíram um modelo preditivo baseado em dados usando aprendizado de máquina. Eles geraram centenas de casos exemplares em Python, cada um descrevendo uma combinação única de pressões nas cinco câmaras e os movimentos de flexão e torção resultantes. Dois tipos de algoritmos de aprendizado — redes neurais artificiais e máquinas de vetores de suporte — foram treinados para mapear pressões em quatro resultados: ângulo de flexão, ângulo de torção e a rapidez com que cada um desses movimentos ocorre. Depois de limpar e escalonar os dados, a equipe treinou e testou esses modelos, descobrindo que ambos reproduziam de perto os resultados das simulações, com a rede neural apresentando desempenho ligeiramente melhor no geral.
Da simulação para o hardware real
Para confirmar que seus modelos virtuais correspondiam à realidade, os autores construíram moldes físicos com uma impressora 3D e fundiram o corpo do endoscópio em um silicone muito elástico. Em seguida, pressurizaram as câmaras em etapas cuidadosamente controladas e mediram o quanto o dispositivo real se dobrava. Os ângulos de flexão experimentais seguiram de perto as previsões das simulações, com pequenas diferenças explicadas por variações naturais no silicone e pelas simplificações do modelo matemático. Repetir o mesmo teste várias vezes produziu ângulos de flexão praticamente idênticos, mostrando que o dispositivo se comporta de forma confiável. Em uma faixa de pressões, o protótipo alcançou maior flexão que projetos anteriores em pressões mais seguras e mais baixas, validando tanto o conceito mecânico quanto as ferramentas preditivas baseadas em IA.
O que isso significa para pacientes e cirurgiões
Em termos práticos, este trabalho nos aproxima de instrumentos cirúrgicos que se movem mais como a ponta de um dedo delicado do que como uma haste rígida. O novo endoscópio macio pode dobrar acentuadamente mantendo-se dentro de limites de pressão seguros, ajudando cirurgiões a alcançar áreas ocultas ou de difícil acesso com menor risco de lesão. O modelo de IA acompanhante funciona como uma "tabela de consulta" rápida que informa a projetistas e, no futuro, a sistemas de controle como o escopo responderá antes de se mover, sem a necessidade de rodar simulações pesadas a cada vez. Com desenvolvimento adicional — como conectar múltiplos segmentos, adicionar sensoriamento em tempo real e fechar o ciclo entre medições e controle — essa combinação de robótica macia e inteligência artificial pode tornar procedimentos minimamente invasivos mais seguros, precisos e acessíveis a mais pacientes.
Citação: Hani, M., Elghitany, M.N., Sweif, R. et al. Design of a soft robotic endoscope with enhanced bending and AI-based prediction. Sci Rep 16, 12878 (2026). https://doi.org/10.1038/s41598-026-46334-y
Palavras-chave: endoscópio robótico macio, cirurgia minimamente invasiva, atuadores pneumáticos macios, robótica médica, modelagem por inteligência artificial