Clear Sky Science · fr
Conception d’un endoscope robotique mou avec flexion améliorée et prédiction basée sur l’IA
Outils plus doux pour la chirurgie coelioscopique
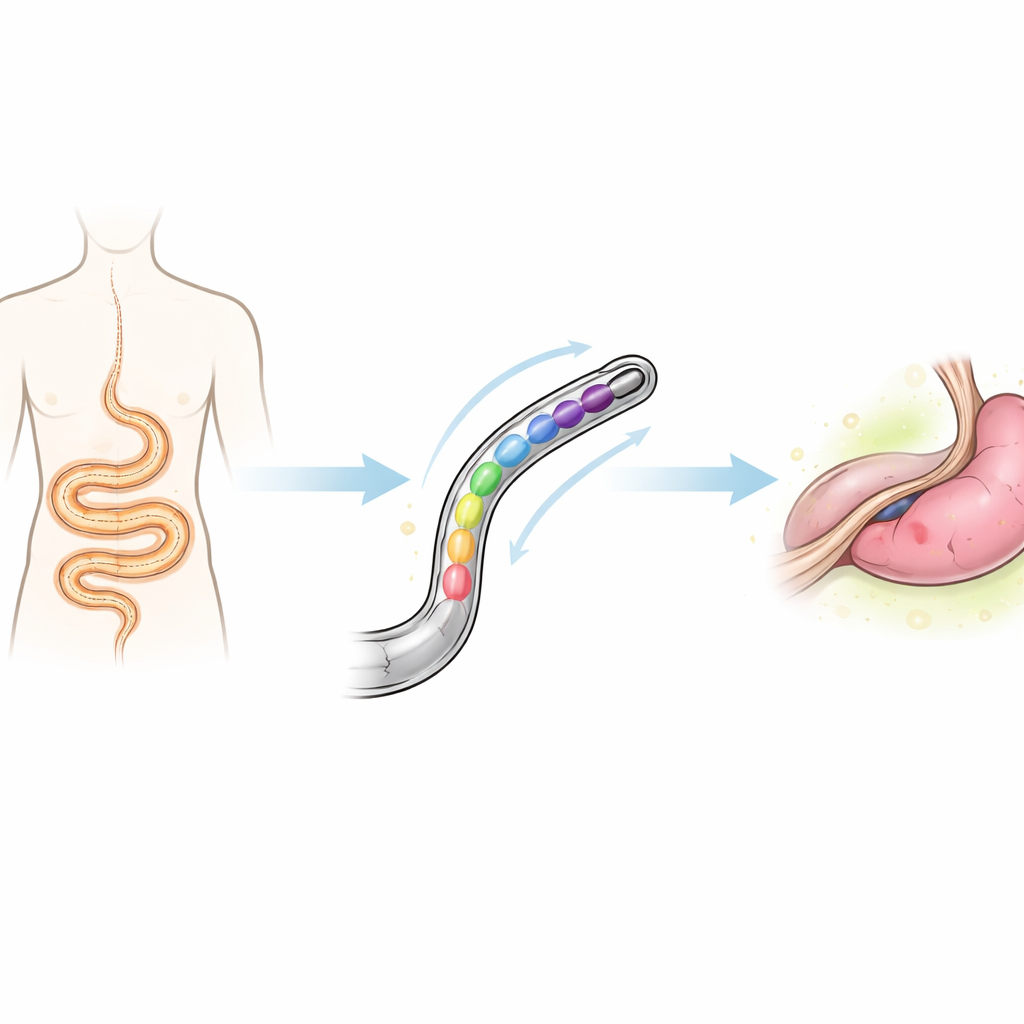
De nombreuses interventions modernes se pratiquent désormais par de petites incisions ou des ouvertures naturelles plutôt que par de larges coupures. Cette approche, appelée chirurgie mini-invasive, aide les patients à récupérer plus rapidement et avec moins de douleur. Mais pour que cela fonctionne bien, les chirurgiens ont besoin d’outils longs et serpentins capables de se manœuvrer dans les voies tortueuses du corps sans endommager les tissus délicats. Cet article présente un nouveau type d’endoscope souple et flexible qui se plie plus facilement avec une pression interne plus faible, ainsi qu’un modèle informatique intelligent capable de prédire ses mouvements. Ensemble, ils ouvrent la voie à des instruments chirurgicaux à la fois plus sûrs pour les patients et plus simples à contrôler pour les chirurgiens.
Pourquoi les endoscopes traditionnels sont insuffisants
Les endoscopes conventionnels se situent à deux extrêmes. Les appareils rigides sont solides et précis mais peinent à négocier les courbes serrées en profondeur dans le corps. Les très flexibles peuvent atteindre plus loin mais risquent de fléchir, de se boucler ou de perdre le contrôle, ce qui complique le travail du chirurgien. Les endoscopes robotiques souples cherchent à combiner le meilleur des deux mondes en utilisant des matériaux élastomères qui se courbent en douceur lorsque leurs chambres internes sont pressurisées. Pourtant, de nombreux modèles actuels nécessitent des pressions relativement élevées pour obtenir une déformation utile, ce qui pose des problèmes de sécurité : si la pression à l’intérieur de l’appareil approche ou dépasse la pression sanguine, une défaillance pourrait endommager les tissus. Les conceptions antérieures souffraient aussi de frottements, de ballonnements ou de mouvements imprévisibles, et elles exigeaient souvent de lourdes simulations informatiques à chaque modification du design.
Un nouveau corps de flexion
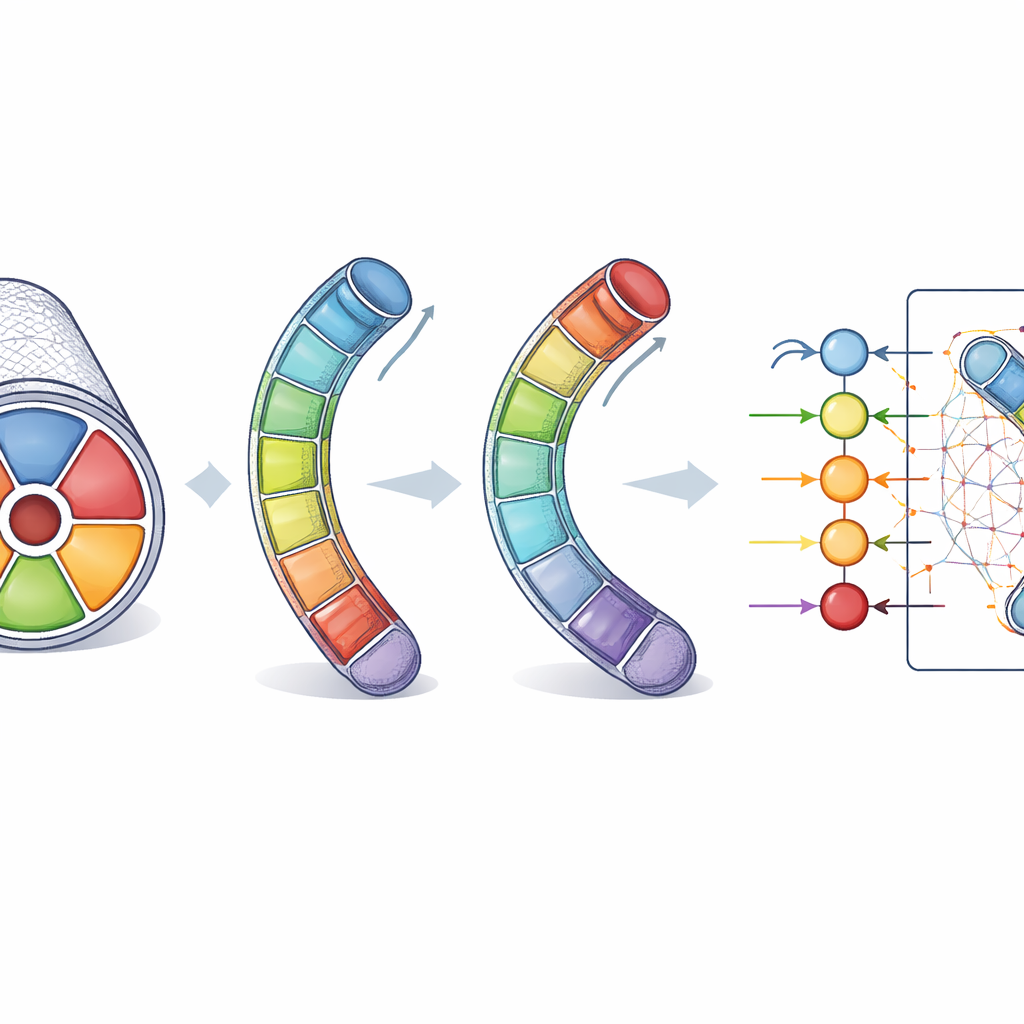
Les chercheurs proposent un endoscope souple repensé, en forme de court cylindre comportant cinq chambres d’air internes disposées autour de son centre. Chaque chambre a une section transversale en demi-lune plutôt qu’un simple cercle, ce qui favorise une flexion plus marquée avec moins de gonflement indésirable. Une gaine externe légère en fibres enveloppe l’appareil, l’empêchant de se dilater vers l’extérieur lorsque l’air est injecté et maintenant la forme stable. En choisissant soigneusement le nombre, la forme et le placement des chambres, l’équipe a créé un module capable d’atteindre un angle de flexion d’environ 90 degrés avec seulement 0,2 bar de pression — inférieur à la pression sanguine typique et supérieur de plus de 10 % à une conception de référence dans des conditions similaires. Cela facilite la navigation autour d’angles serrés tout en maintenant des charges faibles sur les tissus environnants.
Tester la conception dans le monde virtuel
Pour comprendre précisément le comportement de leur endoscope, les auteurs se sont d’abord appuyés sur des simulations informatiques détaillées. En utilisant une méthode appelée analyse par éléments finis, ils ont modélisé le corps en silicone souple et sa couche externe en fibres tout en variant les pressions d’air dans les chambres. Cela leur a permis de prédire l’amplitude de flexion ou de torsion et de vérifier si le matériau restait dans des limites sûres. L’équipe a testé différentes résolutions de maillage — le degré de finesse de la découpe du dispositif pour le calcul — jusqu’à ce que les résultats ne varient plus significativement, signe que les prédictions étaient stables. Ces simulations ont montré que l’ajustement des chambres pressurisées et de leur valeur peut produire des flexions contrôlées dans différentes directions et, si nécessaire, des torsions autour de l’axe central.
Laisser l’intelligence artificielle apprivoiser le mouvement
Exécuter des simulations aussi détaillées pour chaque nouvelle configuration de pression ou modification de design serait lent et coûteux en calcul. Pour y remédier, les chercheurs ont construit un modèle prédictif fondé sur les données à l’aide de l’apprentissage automatique. Ils ont généré des centaines de cas exemples en Python, chacun décrivant une combinaison unique de pressions dans les cinq chambres et les mouvements de flexion et de torsion résultants. Deux types d’algorithmes d’apprentissage — réseaux de neurones artificiels et machines à vecteurs de support — ont été entraînés pour effectuer la correspondance des pressions vers quatre résultats : l’angle de flexion, l’angle de torsion et la vitesse à laquelle chacun de ces mouvements se produit. Après nettoyage et mise à l’échelle des données, l’équipe a entraîné et testé ces modèles, constatant que les deux reproduisaient fidèlement les résultats des simulations, le réseau de neurones affichant une performance légèrement supérieure dans l’ensemble.
De la simulation au matériel réel
Pour vérifier que leurs modèles virtuels correspondaient à la réalité, les auteurs ont fabriqué des moules physiques avec une imprimante 3D et coulé le corps de l’endoscope dans un silicone très extensible. Ils ont ensuite pressurisé les chambres par étapes contrôlées et mesuré l’angle de flexion du dispositif réel. Les angles mesurés correspondaient étroitement aux prédictions des simulations, avec de petites différences expliquées par les variations naturelles du silicone et les simplifications du modèle mathématique. La répétition des mêmes essais a donné des angles de flexion presque identiques, montrant que le dispositif se comporte de manière fiable. Sur une plage de pressions, le prototype a atteint des flexions supérieures à celles des conceptions précédentes à des pressions plus sûres et plus faibles, validant à la fois le concept mécanique et les outils de prédiction basés sur l’IA.
Ce que cela signifie pour les patients et les chirurgiens
Concrètement, ce travail nous rapproche d’instruments chirurgicaux qui se déplacent plus comme une pointe de doigt douce que comme une tige rigide. Le nouvel endoscope souple peut se plier fortement tout en restant dans des limites de pression sûres, aidant les chirurgiens à atteindre des zones cachées ou difficiles d’accès avec moins de risque de blessure. Le modèle d’IA associé agit comme une « table de consultation » rapide qui indique aux concepteurs et, à l’avenir, aux systèmes de contrôle comment la sonde réagira avant qu’elle ne bouge, sans avoir à relancer de grosses simulations à chaque fois. Avec des développements supplémentaires — par exemple en reliant plusieurs segments, en ajoutant des capteurs en temps réel et en fermant la boucle entre mesures et commande — cette combinaison de robotique souple et d’intelligence artificielle pourrait rendre les procédures mini-invasives plus sûres, plus précises et accessibles à un plus grand nombre de patients.
Citation: Hani, M., Elghitany, M.N., Sweif, R. et al. Design of a soft robotic endoscope with enhanced bending and AI-based prediction. Sci Rep 16, 12878 (2026). https://doi.org/10.1038/s41598-026-46334-y
Mots-clés: endoscope robotique mou, chirurgie mini-invasive, actionneurs pneumatiques souples, robotique médicale, modélisation par intelligence artificielle