Clear Sky Science · ru
Конструкция мягкого роботизированного эндоскопа с улучшенной гибкостью и предсказанием на основе ИИ
Более нежные инструменты для хирургии через ключевые отверстия
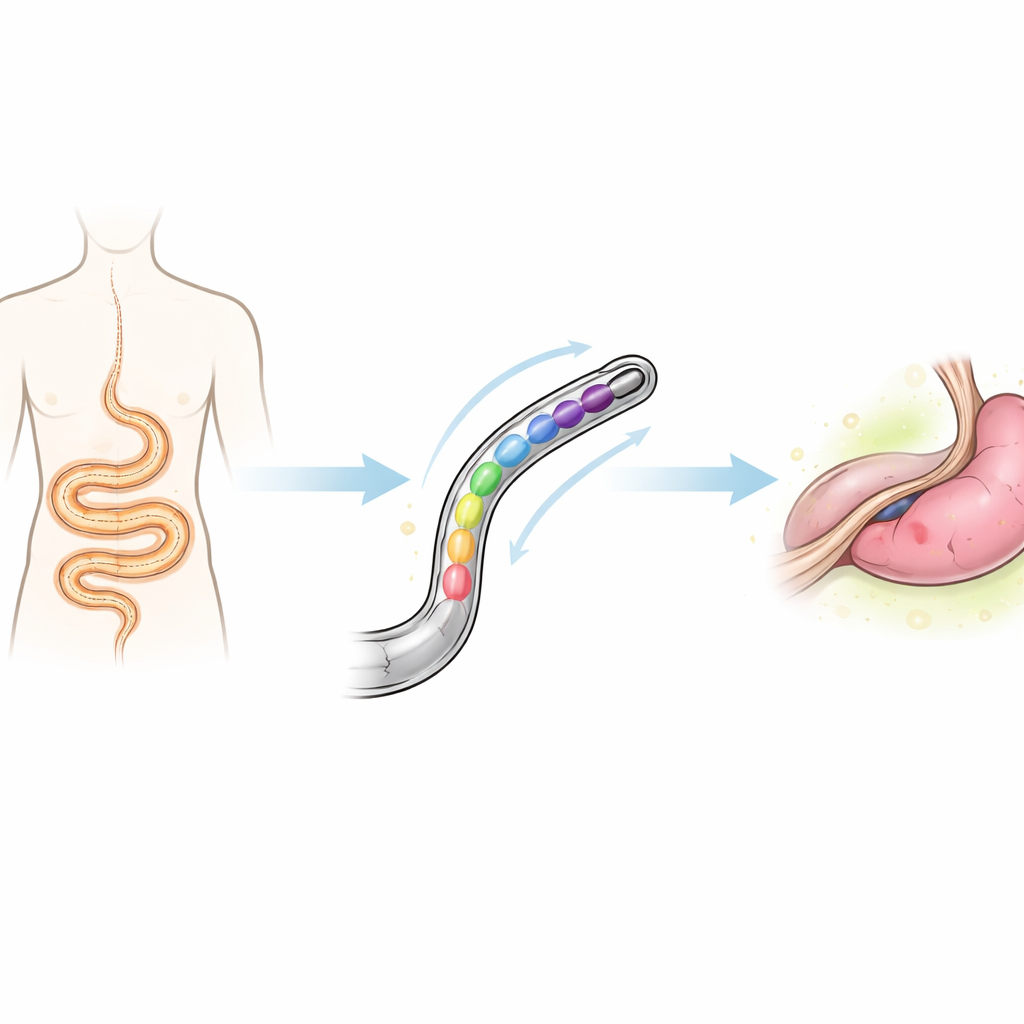
Во многих современных операциях вместо больших разрезов теперь используют крошечные надрезы или естественные отверстия тела. Этот подход, называемый малоинвазивной хирургией, помогает пациентам быстрее восстанавливаться и испытывать меньше боли. Но для его успешного применения врачам нужны длинные, змееобразные инструменты, которые могут маневрировать по извилистым путям внутри тела, не повреждая деликатные ткани. В этой работе представлен новый тип мягкого гибкого эндоскопа, который легче сгибается при более низком внутреннем давлении, а также интеллектуальная компьютерная модель, способная предсказывать его движение. В совокупности они указывают путь к хирургическим инструментам, одновременно более безопасным для пациентов и удобным для управления хирургами.
Почему традиционные эндоскопы не идеальны
Обычные эндоскопы находятся на двух крайностях. Жесткие устройства прочны и точны, но с трудом проходят через резкие изгибы глубоко внутри тела. Очень гибкие — могут проникать дальше, но склонны к прогибу, образованию петель или потере управления, что осложняет точную работу хирурга. Мягкие роботизированные эндоскопы стремятся объединить лучшие качества обоих подходов, используя резинообразные материалы, которые плавно изгибаются при заполнении камер воздухом. Тем не менее многие существующие конструкции требуют относительно высокого давления для достижения полезного изгиба, что вызывает опасения по безопасности: если давление в устройстве приближается к давлению крови или превышает его, при отказе может пострадать ткань. Ранние разработки также страдали от трения, выпячивания или непредсказуемого движения и часто требовали тяжёлых вычислительных симуляций при каждой модификации дизайна.
Новый изгибающийся модуль
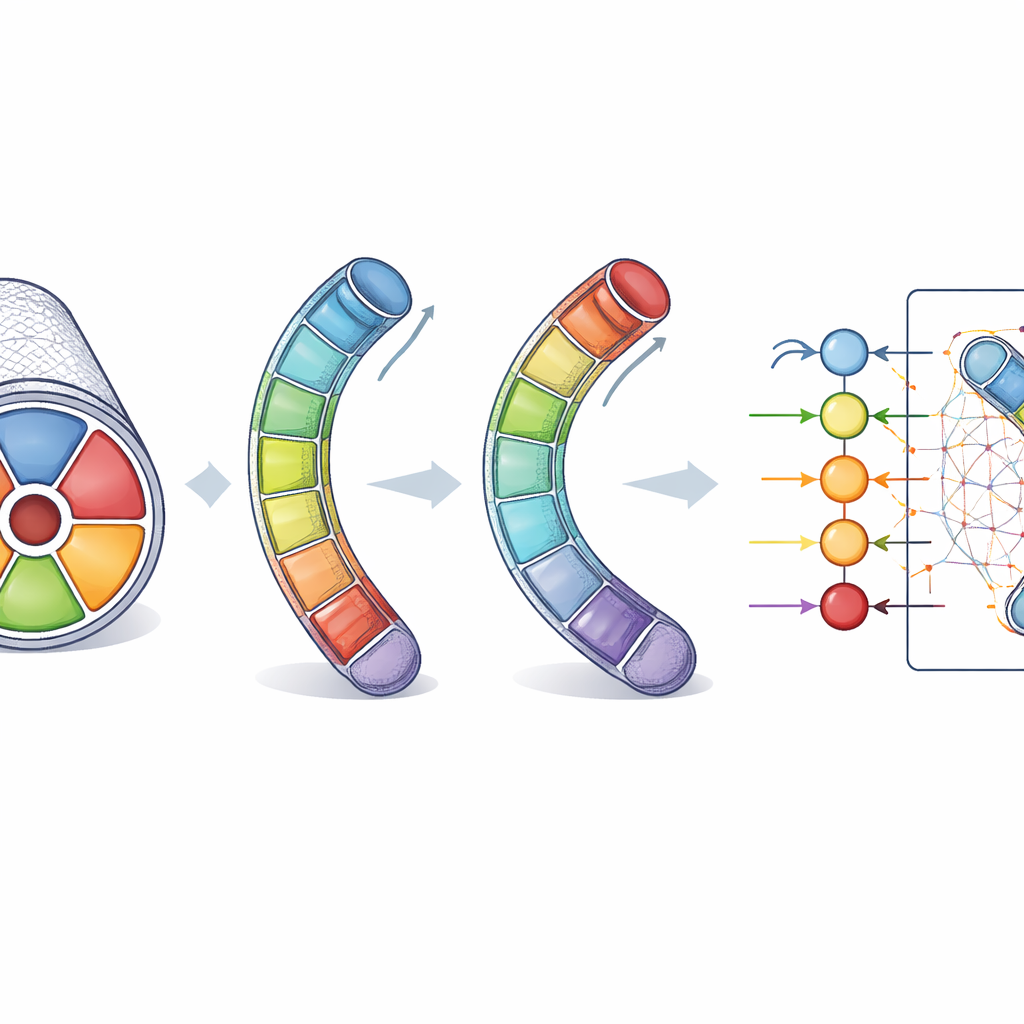
Исследователи предлагают переработанный мягкий эндоскоп в форме короткого цилиндра с пятью внутренними воздушными камерами, расположенными вокруг центра. Каждая камера имеет полулунное сечение вместо простой круглой формы, что помогает создавать более сильный изгиб при меньшем нежелательном выпячивании. Лёгкая внешняя оболочка из волокон обёртывает устройство, предотвращая его выпячивание наружу при подаче воздуха и сохраняя стабильную форму. Тщательно выбирая число, форму и расположение камер, команда создала модуль, который может достигать угла изгиба порядка 90 градусов при давлении всего 0,2 бар — ниже типичного давления крови и более чем на 10 процентов лучше, чем ведущая предыдущая конструкция в сопоставимых условиях. Это облегчает прохождение резких поворотов, одновременно снижая нагрузку на окружающие ткани.
Тестирование конструкции в виртуальной среде
Чтобы точно понять, как будет вести себя их эндоскоп, авторы сначала опирались на подробные компьютерные симуляции. С помощью метода конечных элементов они моделировали мягкое силиконовое тело и его внешнюю волоконную прослойку при вариации давления в камерах. Это позволило предсказать, насколько устройство будет изгибаться или крутиться, и проверить, останется ли материал в безопасных пределах. Команда экспериментировала с различным разрешением сетки — степенью разбиения модели для расчётов — пока результаты перестали значительно меняться, что свидетельствует о стабильности предсказаний. Симуляции показали, что регулировка того, какие камеры нагнетаются и в какой степени, может обеспечить управляемый изгиб в разных направлениях и, при желании, скручивание вокруг центральной оси.
Обучение движения с помощью искусственного интеллекта
Запуск таких детальных симуляций для каждой новой схемы давления или очередной модификации дизайна был бы медленным и вычислительно затратным. Чтобы преодолеть это, исследователи построили модель предсказания на основе данных с помощью машинного обучения. Они сгенерировали сотни примеров в Python, каждый описывающий уникальную комбинацию давлений в пяти камерах и соответствующие изгибы и скручивания. Два типа алгоритмов — искусственные нейронные сети и машины опорных векторов — были обучены отображать давления на четыре результата: угол изгиба, угол скручивания и скорость каждого из этих движений. После очистки и масштабирования данных команда обучила и протестировала модели, обнаружив, что обе способны точно воспроизводить результаты симуляций, при этом нейронная сеть показала немного лучшие общие результаты.
От симуляции к реальному образцу
Чтобы подтвердить соответствие виртуальных моделей реальности, авторы изготовили физические формы на 3D-принтере и отлили корпус эндоскопа из очень тянущегося силикона. Затем они поэтапно нагнетали давление в камерах и измеряли, насколько реально устройство изгибается. Экспериментальные углы изгиба тесно соответствовали предсказаниям симуляций, небольшие расхождения объяснялись естественными вариациями в силиконе и упрощениями математической модели. Повторение одних и тех же испытаний несколько раз давало почти идентичные углы изгиба, показывая, что устройство ведёт себя надёжно. В диапазоне исследованных давлений прототип демонстрировал больший изгиб по сравнению с предыдущими моделями при более безопасных, низких давлениях, валидация как механической концепции, так и инструментов предсказания на основе ИИ.
Что это означает для пациентов и хирургов
Проще говоря, эта работа приближает нас к хирургическим инструментам, которые двигаются больше как нежный кончик пальца, чем как жёсткая палка. Новый мягкий эндоскоп может сильно изгибаться, оставаясь в безопасных пределах по давлению, что помогает хирургам добираться до скрытых или труднодоступных участков с меньшим риском травмы. Сопровождающая модель ИИ работает как быстрый «справочник», подсказывающий конструкторам и в будущем управляющим системам, как отреагирует эндоскоп прежде, чем он выполнит движение, без необходимости каждый раз запускать тяжёлые симуляции. При дальнейшей доработке — например, объединении нескольких сегментов, добавлении датчиков в реальном времени и замыкании обратной связи между измерениями и управлением — сочетание мягкой робототехники и искусственного интеллекта может сделать малоинвазивные процедуры более безопасными, точными и доступными большему числу пациентов.
Цитирование: Hani, M., Elghitany, M.N., Sweif, R. et al. Design of a soft robotic endoscope with enhanced bending and AI-based prediction. Sci Rep 16, 12878 (2026). https://doi.org/10.1038/s41598-026-46334-y
Ключевые слова: мягкий роботизированный эндоскоп, малоинвазивная хирургия, пневматические мягкие приводы, медицинская робототехника, моделирование с помощью искусственного интеллекта