Clear Sky Science · ar
تصميم منظار روبوتي لين مع تحسن في الانحناء وتنبؤ قائم على الذكاء الاصطناعي
أدوات ألطف لجراحة الفتحة الصغيرة
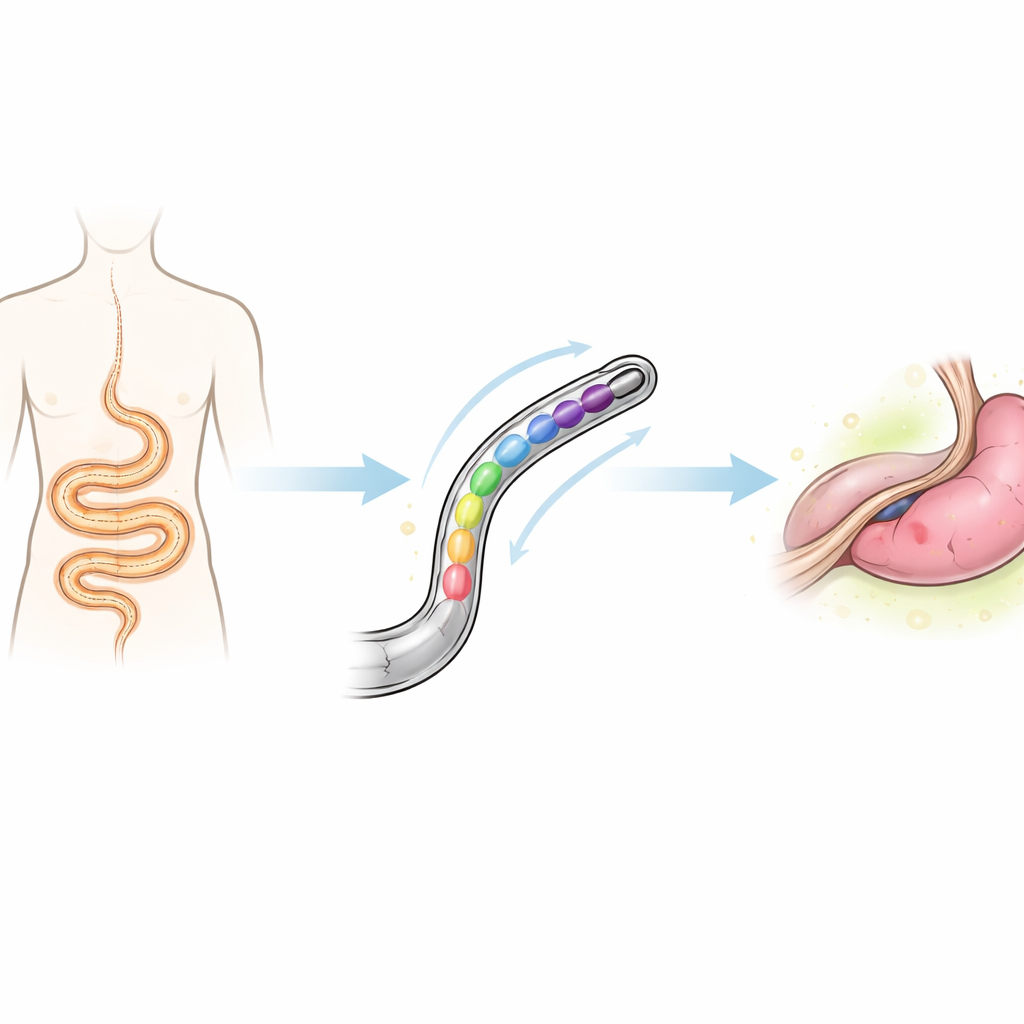
تُجرى العديد من العمليات الحديثة الآن عبر شقوق صغيرة أو عبر فتحات طبيعية بدلاً من شقوق كبيرة. تُمكّن هذه المقاربة، المسماة الجراحة قليلة التوغل، المرضى من التعافي أسرع وبألم أقل. لكن لجعلها فعالة، يحتاج الأطباء إلى أدوات طويلة تشبه الثعبان يمكن توجيهها عبر الممرات المتعرجة للجسم دون إيذاء الأنسجة الحساسة. تقدم هذه الورقة نوعًا جديدًا من المناظير اللينة والمرنة التي تنثني بسهولة أكبر عند ضغوط داخلية أقل، إلى جانب نموذج حاسوبي ذكي يمكنه التنبؤ بحركتها. معًا، تشير هذه التقنيات إلى أدوات جراحية أكثر أمانًا للمرضى وأسهل تحكمًا للجراحين.
لماذا المناظير التقليدية لا تفي بالغرض
تقع المناظير التقليدية عند قطبين متعاكسين. فالمثبتة منها قوية ودقيقة لكنها تواجه صعوبة في التنقل عبر الانحناءات الضيقة عميقًا داخل الجسم. والمناظير شديدة المرونة قد تصل لأماكن أبعد لكنها قد تنطوي أو تتكوّر أو تفقد السيطرة، مما يصعّب عمل الجراحين بدقة. تحاول المناظير الروبوتية اللينة الجمع بين الأفضل في العالمين باستخدام مواد تشبه المطاط تنثني بسلاسة عند ضخ الهواء إلى غرفها الداخلية. ومع ذلك، تتطلب العديد من التصاميم الحالية ضغوطًا نسبياً عالية لتحقيق انحناء مفيد، ما يثير مخاوف تتعلق بالسلامة: إذا اقترب الضغط داخل الجهاز أو تجاوز ضغط الدم، فقد يؤدي فشل إلى إحداث ضرر في الأنسجة. كما عانت التصاميم السابقة من الاحتكاك أو الانتفاخ أو الحركة غير المتوقعة، وغالبًا ما كانت تحتاج محاكاة حاسوبية مكثفة في كل مرة يتغير فيها التصميم.
جسم انحناء جديد
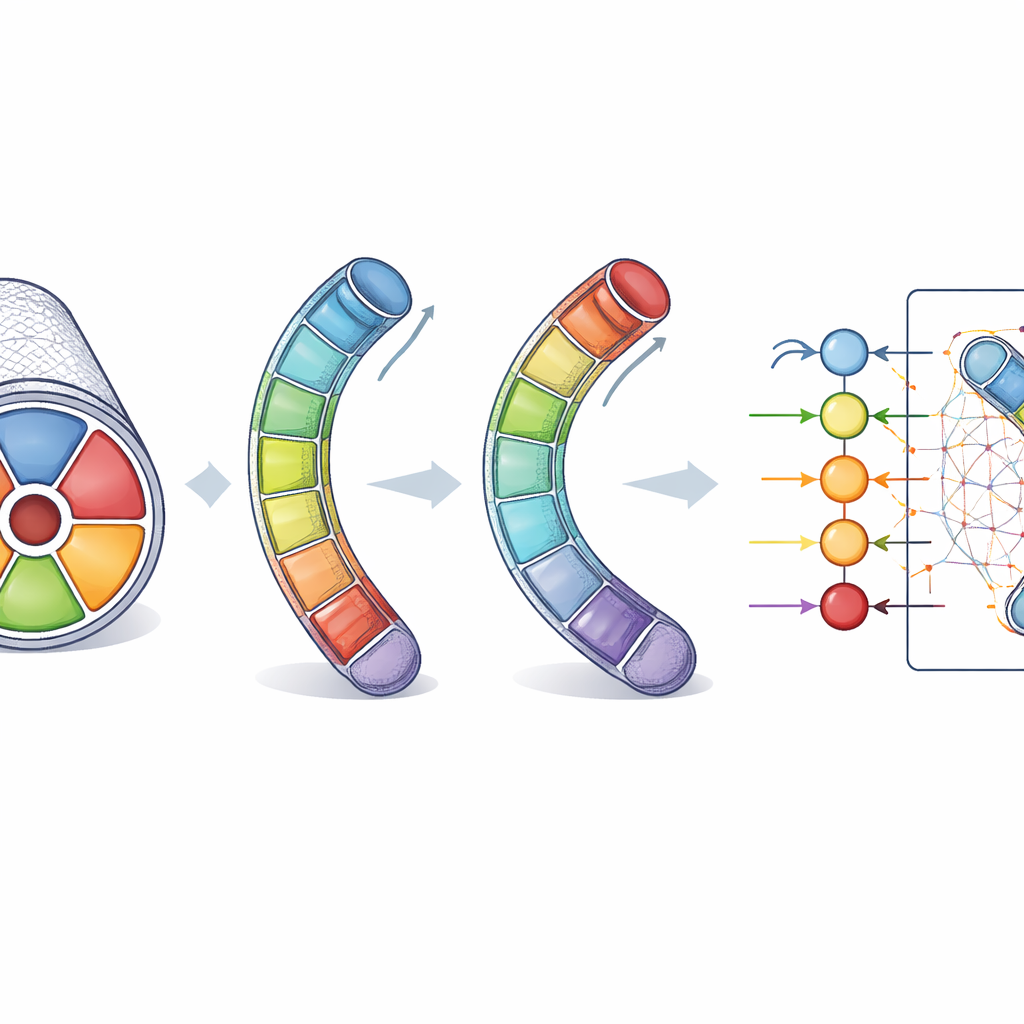
يقترح الباحثون منظارًا لينًا معاد تصميمه على شكل أسطوانة قصيرة تحتوي على خمس غرف هوائية داخلية مرتبة حول المركز. كل غرفة ذات مقطع نصف قمري بدلاً من دائرة بسيطة، ما يساعد على توليد انحناء أقوى مع انتفاخ جانبي أقل غير مرغوب فيه. يغلف غلاف خفيف من الألياف الجزء الخارجي للجهاز، مانعًا له الانتفاخ إلى الخارج عند ضخ الهواء والحافظًا على استقراره الشكلي. من خلال اختيار عدد الغرف وشكلها وموقعها بعناية، أنشأ الفريق وحدة قادرة على الوصول إلى زاوية انحناء تقارب 90 درجة باستخدام ضغط يقارب 0.2 بار — أقل من ضغط الدم النموذجي وأكثر من 10 في المئة أفضل من تصميم سابق رائد في ظروف مماثلة. هذا يجعل من السهل التوجيه حول الزوايا الحادة مع إبقاء الأحمال على الأنسجة المحيطة منخفضة.
اختبار التصميم في العالم الافتراضي
لفهم كيف سيؤدي منظارهم بالضبط، اعتمد المؤلفون أولًا على محاكيات حاسوبية مفصلة. باستخدام طريقة تُسمى تحليل العناصر المنتهية، نمذجوا جسم السيليكون اللين وطبقة الألياف الخارجية في حين تم تغيير ضغوط الهواء داخل الغرف. أتاح لهم ذلك التنبؤ بمدى انحناء أو التواء الجهاز وفحص ما إذا كانت المادة ستبقى ضمن حدودها الآمنة. جرّب الفريق دِقّات شبكية مختلفة—أي مدى تجزئة الجهاز للحساب—حتى استقرت النتائج ولم تعد تتغير بشكل كبير، وهو مؤشر على ثبات التنبؤات. أظهرت هذه المحاكاة أن تعديل أي الغرف تُضخ، وبأي مقدار، يمكن أن يولد انحناءً متحكمًا في اتجاهات مختلفة وإذا رغِب، التواءً حول المحور المركزي.
ترك الذكاء الاصطناعي يتعلم الحركة
إجراء مثل هذه المحاكاة التفصيلية لكل نمط ضغط جديد أو تعديل تصميمي سيكون بطيئًا ومكلفًا حسابيًا. لتجاوز ذلك، بنى الباحثون نموذجًا تنبؤيًا قائمًا على البيانات باستخدام التعلم الآلي. أنتجوا مئات الحالات النموذجية في بايثون، كل منها يصف تركيبة فريدة من الضغوط في الغرف الخمس والحركات الناتجة من انحناء والتواء. تم تدريب نوعين من خوارزميات التعلم—الشبكات العصبية الاصطناعية وآلات المتجهات الداعمة—للمطابقة بين الضغوط وأربعة مخرجات: زاوية الانحناء، زاوية الالتواء، وسرعة حدوث كل من هاتين الحركتين. بعد تنظيف وتحجيم البيانات، درّب الفريق هذه النماذج واختبرها، ووجدوا أن كلا النموذجين قادران على إعادة نتائج المحاكاة بدقة عالية، مع تفوق طفيف للشبكة العصبية إجمالًا.
من المحاكاة إلى الجهاز الحقيقي
لتأكيد أن نماذجهم الافتراضية تطابق الواقع، بنى المؤلفون قوالب فعلية باستخدام طابعة ثلاثية الأبعاد وصبّوا جسم المنظار بسيليكون شديد المرونة. ثم ضخوا الغرف بخطوات خاضعة للسيطرة وقياسوا مقدار انحناء الجهاز الحقيقي. تابعت زوايا الانحناء التجريبية توقعات المحاكاة عن كثب، مع اختلافات طفيفة فسّرها الباحثون بتباينات طبيعية في السيليكون وبالتبسيطات في النموذج الرياضي. تكرار نفس الاختبار مرات عدة أعطى زوايا انحناء متقاربة جدًا، مما يدل على أن الجهاز يتصرف بثبات. عبر مجموعة من الضغوط، حقق النموذج الأولي انحناء أعلى من التصاميم السابقة عند ضغوط آمنة وأدنى، ممّا يثبت صحة المفهوم الميكانيكي وأدوات التنبؤ القائمة على الذكاء الاصطناعي.
ماذا يعني هذا للمرضى والجراحين
بمعنى يومي، تقربنا هذه العمل من أدوات جراحية تتحرك أشبه بطرف إصبع لطيف بدلاً من قضيب صلب. يمكن للمنظار اللين الجديد أن ينحني بشكل حاد مع البقاء ضمن حدود ضغط آمنة، مما يساعد الجراحين على الوصول إلى مناطق مخفية أو يصعب الوصول إليها مع خطر أقل للإصابة. يعمل نموذج الذكاء الاصطناعي المصاحب كنوع من "جدول بحث" سريع يخبر المصممين، وفي المستقبل أنظمة التحكم، كيف سيستجيب المنظار قبل أن يتحرك، من دون الحاجة لإعادة تشغيل محاكاة ثقيلة في كل مرة. مع مزيد من التطوير—مثل ربط عدة مقاطع، إضافة استشعار في الزمن الحقيقي، وإغلاق الحلقة بين القياس والتحكم—قد يجعل هذا المزج بين الروبوتات اللينة والذكاء الاصطناعي الإجراءات قليلة التوغل أكثر أمانًا ودقة ومتاحة لعدد أكبر من المرضى.
الاستشهاد: Hani, M., Elghitany, M.N., Sweif, R. et al. Design of a soft robotic endoscope with enhanced bending and AI-based prediction. Sci Rep 16, 12878 (2026). https://doi.org/10.1038/s41598-026-46334-y
الكلمات المفتاحية: منظار روبوتي لين, الجراحة قليلة التوغل, مشغلات مرنة هوائية, روبوتات طبية, نمذجة بالذكاء الاصطناعي