Clear Sky Science · de
Entwurf eines weichen robotischen Endoskops mit verbesserter Biegung und KI-basierter Vorhersage
Sanftere Instrumente für Schlüssellochchirurgie
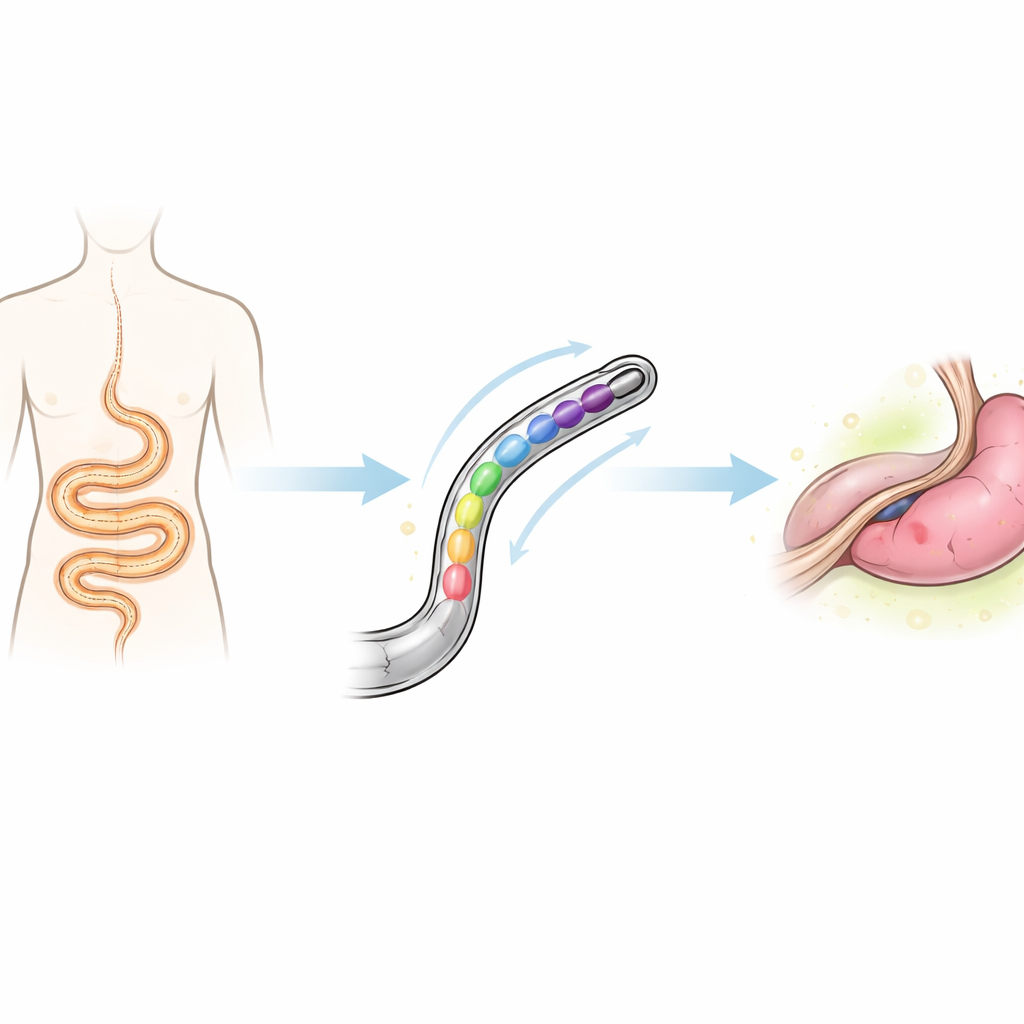
Viele moderne Operationen werden inzwischen durch winzige Schnitte oder natürliche Öffnungen statt durch große Inzisionen durchgeführt. Dieser Ansatz, bekannt als minimalinvasive Chirurgie, ermöglicht Patienten eine schnellere Genesung bei geringeren Schmerzen. Damit das gut funktioniert, benötigen Ärztinnen und Ärzte jedoch lange, schlangenartige Instrumente, die sich durch die gewundenen Bahnen des Körpers steuern lassen, ohne empfindliches Gewebe zu schädigen. Dieses Papier stellt eine neue Art von weichem, flexiblen Endoskop vor, das sich bei niedrigeren Innendrücken leichter biegt, sowie ein intelligentes Computermodell, das seine Bewegung vorhersagen kann. Zusammen deuten sie auf chirurgische Instrumente hin, die sowohl sicherer für Patientinnen und Patienten als auch leichter für Chirurgen zu handhaben sind.
Warum traditionelle Endoskope nicht ausreichen
Konventionelle Endoskope liegen an zwei Extremen. Starre Instrumente sind stark und präzise, haben aber Schwierigkeiten, enge Kurven tief im Körper zu passieren. Sehr flexible Instrumente erreichen zwar weiter, können jedoch einknicken, Schleifen bilden oder die Kontrolle verlieren, was die Arbeit der Chirurgen erschwert. Weiche robotische Endoskope versuchen, das Beste aus beiden Welten zu vereinen, indem sie gummiähnliche Materialien verwenden, die sich bei Druck in internen Kammern sanft biegen. Viele aktuelle Entwürfe erfordern jedoch relativ hohen Druck, um nützliche Biegungen zu erzielen, was Sicherheitsbedenken aufwirft: Nähern sich die Druckwerte im Gerät dem Blutdruck an oder überschreiten ihn, könnte ein Ausfall Gewebe schädigen. Frühere Entwürfe litten außerdem unter Reibung, Aufblähung oder unvorhersehbarer Bewegung und erforderten oft aufwändige Computersimulationen bei jeder Designänderung.
Ein neuer Biegekörper
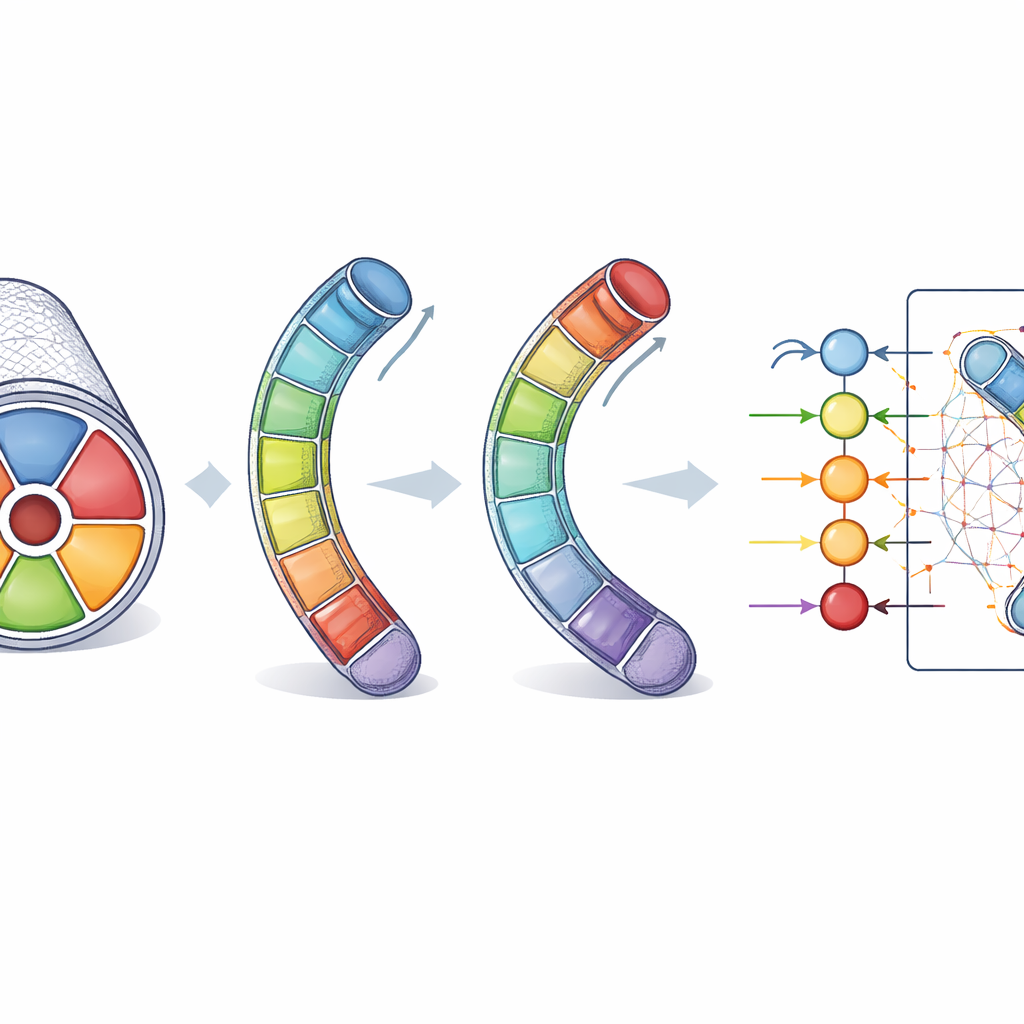
Die Forschenden schlagen ein neu gestaltetes weiches Endoskop vor, das wie ein kurzer Zylinder mit fünf innen liegenden Luftkammern um die Mitte herum aufgebaut ist. Jede Kammer besitzt einen halbmondförmigen Querschnitt statt eines einfachen Kreises, was hilft, stärkere Biegung bei weniger unerwünschtem Aufblähen zu erzeugen. Eine leichte äußere Faserscheide umhüllt das Gerät, verhindert ein nach außen gerichtetes Aufblähen beim Einpumpen von Luft und hält die Form stabil. Durch sorgfältige Wahl der Anzahl, Form und Platzierung der Kammern schuf das Team ein Modul, das einen Biegewinkel von etwa 90 Grad bei nur 0,2 bar Druck erreichen kann — niedriger als typischer Blutdruck und mehr als zehn Prozent besser als ein führendes früheres Design unter ähnlichen Bedingungen. Das erleichtert das Umsteuern um scharfe Ecken bei gleichzeitig geringen Belastungen des umliegenden Gewebes.
Test des Designs in der virtuellen Welt
Um genau zu verstehen, wie sich ihr Endoskop verhalten würde, stützten sich die Autorinnen und Autoren zunächst auf detaillierte Computersimulationen. Mithilfe einer Methode namens Finite-Elemente-Analyse modellierten sie den weichen Silikonkörper und seine äußere Faserlage, während die Luftdrücke in den Kammern variierten. So konnten sie vorhersagen, wie stark sich das Gerät biegen oder verdrehen würde, und prüfen, ob das Material sicher innerhalb seiner Grenzen bleibt. Das Team experimentierte mit verschiedenen Netzauflösungen — also wie fein das Modell für die Berechnung unterteilt wird — bis die Ergebnisse sich nicht mehr signifikant änderten, ein Zeichen dafür, dass die Vorhersagen stabil sind. Diese Simulationen zeigten, dass das gezielte Ansteuern bestimmter Kammern und die Höhe des Drucks kontrollierte Biegungen in verschiedene Richtungen und, falls gewünscht, Drehungen um die Zentralachse erzeugen können.
Künstliche Intelligenz lernt die Bewegung
Solche detaillierten Simulationen für jede neue Druckkombination oder Designänderung erneut laufen zu lassen, wäre langsam und rechenaufwändig. Um dem entgegenzuwirken, bauten die Forschenden ein datengetriebenes Vorhersagemodell mithilfe von Machine Learning. Sie erzeugten Hunderte von Beispielen in Python, die jeweils eine einzigartige Kombination von Drücken in den fünf Kammern und die resultierenden Biege‑ und Drehbewegungen beschreiben. Zwei Arten von Lernalgorithmen — künstliche neuronale Netze und Support-Vektor-Maschinen — wurden trainiert, um von den Drücken zu vier Ergebnissen zu gelangen: Biegewinkel, Drehwinkel und die Geschwindigkeit, mit der jede dieser Bewegungen auftritt. Nach Bereinigung und Skalierung der Daten trainierte und testete das Team diese Modelle und stellte fest, dass beide die Simulationsergebnisse gut reproduzieren konnten, wobei das neuronale Netz insgesamt etwas besser abschnitt.
Von der Simulation zur realen Hardware
Um zu bestätigen, dass ihre virtuellen Modelle der Realität entsprechen, fertigten die Autorinnen und Autoren physische Formen mit einem 3D‑Drucker an und gossen den Endoskopkörper in sehr dehnbaren Silikon. Anschließend wurden die Kammern in kontrollierten Schritten beaufschlagt und gemessen, wie stark sich das reale Gerät biegt. Die experimentell ermittelten Biegewinkel folgten den Simulationsvorhersagen eng, wobei kleine Unterschiede durch natürliche Schwankungen im Silikon und die Vereinfachungen im mathematischen Modell erklärbar sind. Mehrfach wiederholte Tests erzeugten nahezu identische Biegewinkel, was zeigt, dass sich das Gerät verlässlich verhält. Über einen Bereich von Drücken erreichte der Prototyp größere Biegung als frühere Entwürfe bei sichereren, niedrigeren Drücken und bestätigte damit sowohl das mechanische Konzept als auch die KI-basierten Vorhersagewerkzeuge.
Was das für Patientinnen, Patienten und Chirurgen bedeutet
Alltagssprachlich bringt uns diese Arbeit näher an chirurgische Werkzeuge, die sich eher wie eine sanfte Fingerspitze als wie ein starrer Stock bewegen. Das neue weiche Endoskop kann scharf biegen und bleibt dabei innerhalb sicherer Druckgrenzen, wodurch Chirurgen versteckte oder schwer erreichbare Bereiche mit geringerem Verletzungsrisiko erreichen können. Das begleitende KI‑Modell fungiert wie eine schnelle "Lookup‑Tabelle", die Designerinnen und Designern und künftig Steuerungssystemen vor der Bewegung anzeigt, wie das Endoskop reagieren wird, ohne dass bei jeder Änderung aufwändige Simulationen nötig sind. Mit weiterer Entwicklung — etwa dem Verknüpfen mehrerer Segmente, dem Hinzufügen von Echtzeitsensorik und dem Schließen des Regelkreises zwischen Messung und Steuerung — könnte diese Kombination aus weicher Robotik und künstlicher Intelligenz minimalinvasive Eingriffe sicherer, präziser und für mehr Patientinnen und Patienten verfügbar machen.
Zitation: Hani, M., Elghitany, M.N., Sweif, R. et al. Design of a soft robotic endoscope with enhanced bending and AI-based prediction. Sci Rep 16, 12878 (2026). https://doi.org/10.1038/s41598-026-46334-y
Schlüsselwörter: weiches robotisches Endoskop, minimalinvasive Chirurgie, pneumatische weiche Aktuatoren, Medizintechnikrobotik, künstliche Intelligenz Modellierung